技术特征:
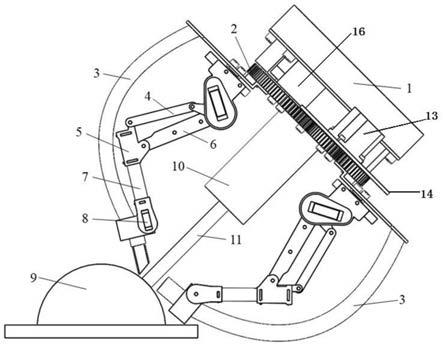
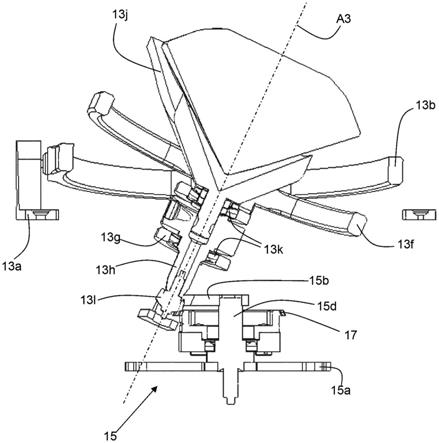
1.一种复合材料干切加工复杂多工况自适应除尘装置,其特征在于:包括所述大齿轮(2)、主轴外连接支架(16)、小齿轮(19)和机械手;所述主轴外连接支架(16)和小齿轮固定支架(14)均可拆卸的连接在机床主轴外壳(1)上,小齿轮固定支架(14)上固定有小齿轮电机(13),小齿轮电机(13)的输出轴穿过小齿轮固定支架(14)并与小齿轮(19)连接;所述主轴外连接支架(16)的下表面连接有大齿轮轴承,大齿轮(2)固定在大齿轮轴承上,小齿轮(19)与大齿轮(2)外啮合;所述机床主轴外壳(1)内的主轴与刀柄(10)连接,刀柄(10)的下端伸出机床主轴外壳(1)并穿过主轴外连接支架(16)和大齿轮轴承,刀具(11)与刀柄(10)的下端连接;所述大齿轮(2)的下表面连接有两块机械手悬挂支撑板(17),两块机械手悬挂支撑板(17)关于大齿轮(2)的轴心对称;两块所述机械手悬挂支撑板(17)的下表面均连接有机械手,机械手包括机械手连杆(4)、机械手连接架(5)、机械手大臂(6)、机械手前端圆杆(7)、机械手前端电机(8)和机械手轴向电机用连接架(23);所述机械手轴向电机用连接架(23)连接在机械手悬挂支撑板(17)下表面,机械手轴向电机用连接架(23)的下方设置有机械手轴向电机用固定板(31),机械手轴向电机用固定板(31)的下表面连接有机械手轴向电机(25),机械手轴向电机(25)的输出轴穿过机械手轴向电机用固定板(31)并与机械手轴向电机用连接架(23)固接;所述机械手轴向电机用固定板(31)的边缘连接有机械手侧面b电机连接架(24)和机械手侧面a电机连接架(30),机械手大臂(6)的上端位于机械手侧面b电机连接架(24)和机械手侧面a电机连接架(30)之间,下端与机械手连接架(5)铰接;所述机械手侧面b电机连接架(24)上连接有机械手侧面b电机(26),机械手侧面b电机(26)的输出轴与机械手侧面b电机摇杆(32)连接,机械手侧面b电机摇杆(32)与机械手连杆(4)的上端铰接,机械手连杆(4)的下端与机械手连接架(5)铰接;所述机械手侧面a电机连接架(30)上连接有机械手侧面a电机(29),机械手侧面a电机(29)的输出轴通过机械手侧面a电机传动杆(33)与机械手大臂(6)的上端固接;所述机械手前端圆杆(7)的上端与机械手连接架(5)连接,下端与机械手前端电机支架(27)连接,机械手前端电机支架(27)上安装有机械手前端电机(8);所述机械手前端电机(8)的输出轴与机械手前端电机轴(40)连接,机械手前端电机轴(40)与软管前端支架(38)连接;两个所述机械手所连接的软管前端支架(38)上均连接有软管(3),两根软管(3)的上端分别固定在两块机械手悬挂支撑板(17)上;两个所述软管前端支架(38)上分别连接有正压软管前端鸭嘴头(39)和负压软管转接头(36),正压软管前端鸭嘴头(39)和负压软管转接头(36)分别与对应的软管(3)连通;加工前,工件传感器检测到工件(9)安装到位后,相机拍照并将获取的工件图像传至数控系统处理,完成所述刀具(11)的轨迹规划并生成加工代码,获得工件(9)的加工轨迹与数控代码;加工时,所述刀具(11)对具有曲面的工件(9)进行加工,数控系统根据加工轨迹与数控代码指导机械手前端电机(8)、小齿轮电机(13)、机械手轴向电机(25)、机械手侧面b电机
(26)和机械手侧面a电机(29)工作,实时调整正压软管前端鸭嘴头(39)和负压软管转接头(36)的位置,向与正压软管前端鸭嘴头(39)连接的软管(3)提供正压气流,正压软管前端鸭嘴头(39)进行吹尘,向与负压软管转接头(36)连接的软管(3)提供负压气流,负压软管转接头(36)进行吸尘。2.根据权利要求1所述的一种复合材料干切加工复杂多工况自适应除尘装置,其特征在于:所述大齿轮轴承包括轴承内圈固定环(15)、大齿轮轴承内圈(22)和大齿轮轴承外圈(21),轴承内圈固定环(15)通过螺钉固定在主轴外连接支架(16)的下表面,轴承内圈固定环(15)的外圈过盈配合有大齿轮轴承内圈(22),大齿轮轴承外圈(21)采用滚珠装配到大齿轮轴承内圈(22)上,大齿轮轴承外圈(21)的外圈与大齿轮(2)的内圈过盈配合连接。3.根据权利要求1所述的一种复合材料干切加工复杂多工况自适应除尘装置,其特征在于:所述主轴外连接支架(16)和小齿轮固定支架(14)均采用螺钉连接在机床主轴外壳(1)上。
技术总结
本发明公开了一种复合材料干切加工复杂多工况自适应除尘装置,包括大齿轮、主轴外连接支架、小齿轮和机械手。主轴外连接支架和小齿轮固定支架均连接在机床主轴外壳上,小齿轮固定支架上固定有小齿轮电机,小齿轮电机的输出轴穿过小齿轮固定支架并与小齿轮连接。主轴外连接支架的下表面连接有大齿轮,小齿轮与大齿轮外啮合。大齿轮的下表面连接有两块机械手悬挂支撑板,两块机械手悬挂支撑板均连接有机械手,两个机械手分别安装正压软管前端鸭嘴头和负压软管转接头。数控系统根据加工轨迹与数控代码指导两个机械手工作,实时调整正压软管前端鸭嘴头和负压软管转接头的位置,吹掉和吸收粉尘。收粉尘。收粉尘。
技术研发人员:曹华军 张金 渠达 田滔 陈宇宣 吴波
受保护的技术使用者:重庆大学
技术研发日:2021.08.16
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。