1.本实用新型涉及工业机械臂遥控技术领域,具体涉及一种阻尼关节及含有该阻尼关节的遥控臂。
背景技术:
2.高空作业机械臂是利用遥控操作臂对高空钢结构、高层建筑等表面等进行施工作业,遥控操作臂是通过与机械臂的控制柜无线通讯,来远程控制机械臂,机械臂通过模仿人工作业姿态来施工,相当于机械臂随着操作人员的遥控姿态而进行动作,可以让操作人员在安全的地方,远离高空高危作业区,让机械臂来代替人工进行作业。遥控操作臂主要的机构由关节和关节臂等组成。关节的作用是能实现关节臂的转动,将转动的角度和方向信息传输给控制器,控制器再传给机械臂,用来控制机械臂的动作。所以关节臂是遥控装置的核心部分。
3.以往的遥控臂关节组成主要由传感器,轴承等等部分组成,则在操作时会因为手臂的晃动造成机械臂动作的不稳定,影响作业效果,操作体验也不太好。
4.为了解决上述问题,亟需发明一种阻尼关节及含有该阻尼关节的遥控臂,以解决现有遥控臂的稳定性较差,以及操作体验较差的问题。
技术实现要素:
5.本实用新型的目的在于提供一种阻尼关节及含有该阻尼关节的遥控臂,有效的解决了现有机械手遥控臂的稳定性较差,作业效果不理想的问题。
6.一种阻尼关节,包括可调弹性球形阻尼器、阻尼轨道、关节臂连接件、角度传感器组件和关节臂三通连接件;所述可调弹性球形阻尼器设置在阻尼轨道上,并且所述可调弹性球形阻尼器可以在阻尼轨道上滚动,所述可调弹性球形阻尼器连接所述关节臂连接件,所述阻尼轨道连接关节臂三通连接件;
7.所述角度传感器组件包括角度传感器和设置在角度传感器下端的轴承,所述轴承与关节臂连接件连接。
8.进一步的,所述可调弹性球形阻尼器通过可调螺丝调整可调弹性球形阻尼器在阻尼轨道上阻尼力的大小。
9.进一步的,所述阻尼轨道上设置有锁死凹槽。
10.进一步的,所述阻尼轨道、关节臂连接件、轴承和关节臂三通连接件均采用轻量化材料。
11.进一步的,所述阻尼轨道、关节臂连接件、轴承和关节臂三通连接件均采用碳纤维材料或铝合金材料。
12.进一步的,所述关节臂连接件和关节臂三通连接件均设置有走线暗孔。
13.本实用新型还提供了一种遥控臂,包括关节一、关节二、关节三和关节四;并且所述关节一、关节二、关节三和关节四为以上所述的阻尼关节。
14.为达到上述目的,本实用新型采用的技术方案如下:
15.与现有技术相比,本实用新型具有以下有益效果:
16.本实用新型提供的阻尼关节及含有该阻尼关节的遥控臂,可以调节阻尼力大小的遥控臂关节。操作时实时提供阻尼力的反馈,按照操作人员舒适度进行实时调节,锁死凹槽的设计,可以提供一个常用的的锁死位置,便于遥控臂使用。整体采用轻量化设计,整体重量相比碳钢轻60%以上;关节臂连接件等内部设计有暗孔,在结构内部,方便走线时可从暗孔中穿过,避免线路外露,影响操作者操作。
17.显然,根据本实用新型的上述内容,按照本领域的普通技术知识和惯用手段,在不脱离本实用新型上述基本技术思想前提下,还可以做出其它多种形式的修改、替换或变更。
18.以下通过具体实施方式,对本实用新型的上述内容再作进一步的详细说明;但不应将此理解为本实用新型上述主题的范围仅限于以下的实例;凡基于本实用新型的构思所实现的技术均属于本实用新型的范围。
附图说明
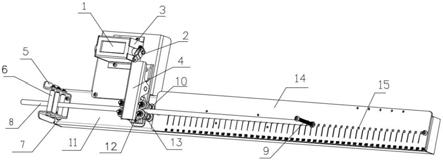
19.图1为本实用新型一种阻尼关节结构示意图;
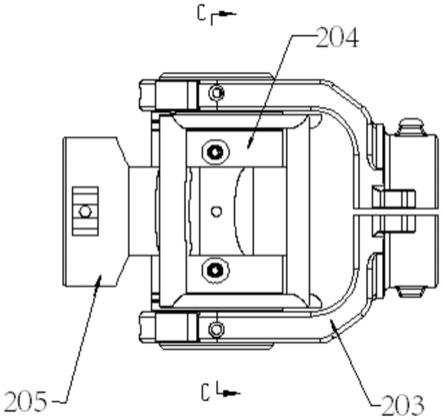
20.图2为本实用新型一种阻尼关节附图1中c-c向剖视图;
21.图3为本实用新型一种阻尼关节结构示意图;
22.图4为本实用新型一种遥控臂结构示意示意图;
23.图中:
24.101-关节一;202-关节二;202-关节三;202-关节四;201-可调弹性球形阻尼;202-阻尼轨道;203-关节臂连接件;204-角度传感器组件;205-关节臂三通连接件;301-角度传感器;302-轴承。
具体实施方式
25.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型作进一步详细说明。
26.实施例1
27.如图1~3所示,本实用新型一种阻尼关节,包括可调弹性球形阻尼器201、阻尼轨道202、关节臂连接件203、角度传感器组件204和关节臂三通连接件205;所述可调弹性球形阻尼器201设置在阻尼轨道202上,并且所述可调弹性球形阻尼器201可以在阻尼轨道202上滚动,所述可调弹性球形阻尼器201连接所述关节臂连接件203,所述阻尼轨道202连接关节臂三通连接件205;
28.所述角度传感器组件204包括角度传感器301和设置在角度传感器301下端的轴承302,所述轴承302与关节臂连接件203连接。
29.进一步的,所述可调弹性球形阻尼器201通过可调螺丝调整可调弹性球形阻尼器201在阻尼轨道202上阻尼力的大小。
30.进一步的,所述阻尼轨道202上设置有锁死凹槽。
31.进一步的,所述阻尼轨道202、关节臂连接件203、轴承302和关节臂三通连接件205均采用轻量化材料。
32.进一步的,所述阻尼轨道202、关节臂连接件203、轴承302和关节臂三通连接件205均采用碳纤维材料或铝合金材料。
33.进一步的,所述关节臂连接件203和关节臂三通连接件205均设置有走线暗孔。
34.实施例2
35.如图4所示的一种遥控臂,包括关节一101、关节二102、关节三103和关节四104;并且所述关节一101、关节二102、关节三103和关节四104为以上所述的阻尼关节。
36.当然,本实用新型还可有其它多种实施方式,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
技术特征:
1.一种阻尼关节,其特征在于:包括可调弹性球形阻尼器(201)、阻尼轨道(202)、关节臂连接件(203)、角度传感器组件(204)和关节臂三通连接件(205);所述可调弹性球形阻尼器(201)设置在阻尼轨道(202)上,并且所述可调弹性球形阻尼器(201)可以在阻尼轨道(202)上滚动,所述可调弹性球形阻尼器(201)连接所述关节臂连接件(203),所述阻尼轨道(202)连接关节臂三通连接件(205);所述角度传感器组件(204)包括角度传感器(301)和设置在角度传感器(301)下端的轴承(302),所述轴承(302)与关节臂连接件(203)连接。2.根据权利要求1所述的一种阻尼关节,其特征在于:所述可调弹性球形阻尼器(201)通过可调螺丝调整可调弹性球形阻尼器(201)在阻尼轨道(202)上阻尼力的大小。3.根据权利要求1所述的一种阻尼关节,其特征在于:所述阻尼轨道(202)上设置有锁死凹槽。4.根据权利要求1所述的一种阻尼关节,其特征在于:所述阻尼轨道(202)、关节臂连接件(203)、轴承(302)和关节臂三通连接件(205)均采用轻量化材料。5.根据权利要求4所述的一种阻尼关节,其特征在于:所述阻尼轨道(202)、关节臂连接件(203)、轴承(302)和关节臂三通连接件(205)均采用碳纤维材料或铝合金材料。6.根据权利要求1所述的一种阻尼关节,其特征在于:所述关节臂连接件(203)和关节臂三通连接件(205)均设置有走线暗孔。7.一种遥控臂,其特征在于:包括关节一(101)、关节二(102)、关节三(103)和关节四(104);所述关节一(101)、关节二(102)、关节三(103)和关节四(104)为权利要求1~6任一项所述的阻尼关节。
技术总结
本实用新型公开了一种阻尼关节,包括可调弹性球形阻尼器、阻尼轨道、关节臂连接件、角度传感器组件和关节臂三通连接件;所述可调弹性球形阻尼器设置在阻尼轨道上,并且所述可调弹性球形阻尼器可以在阻尼轨道上滚动,所述可调弹性球形阻尼器连接所述关节臂连接件,所述阻尼轨道连接关节臂三通连接件;所述角度传感器组件包括角度传感器和设置在角度传感器下端的轴承,所述轴承与关节臂连接件连接。本实用新型提供的阻尼关节及含有该阻尼关节的遥控臂,操作时实时提供阻尼力的反馈,按照操作人员舒适度进行实时调节,锁死凹槽的设计,可以提供一个常用的的锁死位置,便于遥控臂使用。整体采用轻量化设计,整体重量相比碳钢轻60%以上。以上。以上。
技术研发人员:孙是 高玉涛 胡永强 尹晓峰 黄世龙 贾文博 刘忠信 宋晓禹 宋安福
受保护的技术使用者:北京克莱明科技有限公司
技术研发日:2021.11.10
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。