1.本发明涉及脊柱模型领域,尤其涉及一种用于模拟脊柱不稳的装置。
背景技术:
2.医学模型就是医学上使用的或者接触的一些医用医疗模拟器具。包括整体的模拟人体和某个模拟人体部位或者某些模拟人体的部位,以及医疗上必须涉及的一些医疗仪器。
3.目前接触到的医学模型包括:急救技能训练模型,护理技能训练模型,妇婴技能训练模型,诊断技能训练模型,人体针灸模型,人体解剖模型,口腔模型等等,但是在模拟脊柱不稳时,缺乏一种合理有效的模型,在腰椎不稳研究时,无法针对性的进行模拟。
4.因此本发明专利的发明人,针对这一技术问题,旨在发明一种用于模拟脊柱不稳的装置。
技术实现要素:
5.为克服上述缺点,本发明的目的在于提供一种用于模拟脊柱不稳的装置。
6.为了达到以上目的,本发明采用的技术方案是:一种用于模拟脊柱不稳的装置,包括椎骨,所述椎骨设置至少两个,在每个椎骨上设置连接杆,连接杆为穿越双侧椎弓根及椎体的传统椎弓根螺钉的前后加长版,在所述连接杆的一端设置力度控制机构,在所述连接杆的另一端设置角度及位移控制机构,且相邻的连接杆之间通过力度控制机构调节相邻的两个椎骨之间的力度,相邻的所述连接杆之间还通过角度及位移控制机构调节相邻的两个椎骨之间的角度。
7.进一步的,所述力度控制机构包括力度连接块,所述力度连接块内通过连接绳设置力度连接环,且所述连接绳还与力度控制旋钮连接,且所述力度控制旋钮能将连接绳缠绕在力度控制旋钮上,所述力度连接环设置两个,且对称设置在力度连接块的两侧,且两个力度连接环对应的连接绳均位于同一个力度控制旋钮上。通过同一个力度连接块控制相邻的两个椎骨之间的力度,继而模拟位置的椎骨间的力量大小,保证模拟的准确。
8.进一步的,所述力度控制旋钮上还设置有呈圆形分布的多个限位孔,且在其中一个所述限位孔内设置限位按钮,且所述限位按钮通过缓冲弹簧设置在力度连接块上,且在缓冲弹簧的弹力作用下,所述限位按钮能与其中一个限位孔配合,在外力按压所述限位按钮时,所述限位按钮能与所述限位孔分离。需要力度控制时,限位按钮按下,通过力度控制旋钮控制连接绳的力量大小,当到达指定位置后,松开限位按钮,在缓冲弹簧的作用下,限位按钮弹出并卡在限位孔内,实现限位。
9.进一步的,所述角度及位移控制机构包括两个角度连接环,且两个所述角度连接环之间设置菱形角度调节框,且所述菱形角度调节框的四个边角处分别铰接,且菱形角度调节框的呈对角线的两个边角分别铰接一个角度连接环,且在菱形角度调节框的另一个呈对角线的两个边角分别设置角度调节螺母,且两个角度调节螺母之间通过调节螺杆连接,
且在外力旋转时,两个角度调节螺母之间的距离能变大或变小。通过菱形角度调节框的设置,能对相邻的两个椎骨之间的角度进行调节,方便模拟不同病人的脊柱不稳的情况。
10.进一步的,在所述连接杆上设置多个连接凹槽,且多个所述连接凹槽呈等间距分布,且所述连接凹槽能设置力度连接环和角度连接环。即通过连接凹槽的设置,方便对力度连接环和角度连接环的不同位置的调整,继而更好的模拟不同病人的位置的不同。
11.进一步的,所述椎骨在竖直方向设置。即整体来看,椎骨是呈竖直设置的,当然针对不同病人的情况,其突出状态,角度倾斜是不同的,因此针对此情况,进行不同位置的调整。
12.进一步的,所述连接杆横向贯穿椎骨,在椎骨的一侧设置力度控制机构,在椎骨的另一侧设置角度及位移控制机构。具体的说,在椎骨的前端进行力量控制,在椎骨的后端进行角度控制,同时配合多个连接凹槽的设置,也能实现在水平面的平移,至此实现了椎骨的模型建立。
13.进一步的,所述椎骨采用3d打印成型或人体标本或动物椎体。按照具体人体构造,对应的进行椎骨的模型建立,当然在具体到个人时,也可以根据个人差异,针对性的进行椎骨的模型,继而实现精准的判断。3d打印技术即快速成型技术的一种,又称增材制造,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术,3d打印通常是采用数字技术材料打印机来实现的。常在模具制造、工业设计等领域被用于制造模型,后逐渐用于一些产品的直接制造,已经有使用这种技术打印而成的零部件。当然,使用现成的人体椎体或动物椎体直接使用,效果更佳。
14.本发明一种用于模拟脊柱不稳的装置的有益效果是,通过在相邻的椎骨之间设置力度控制机构和角度及位移控制机构,通过这两个机构控制两个椎骨之间的力度、角度变化,实现对人体椎骨的模拟,建立高准确度的脊柱模型,实现了脊柱不稳的模拟,为病例的治疗提供了准确的信息指引。
附图说明
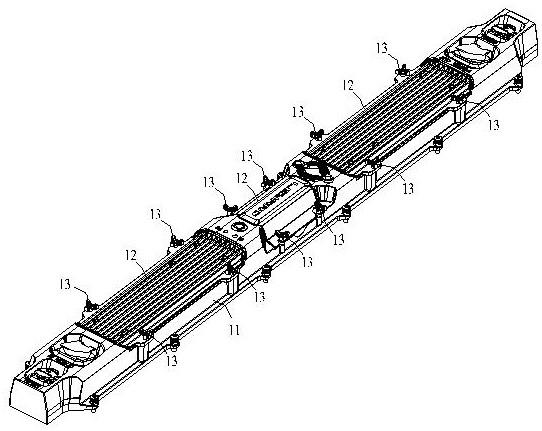
15.图1为用于模拟脊柱不稳的装置的结构示意图。
16.图2为力度控制机构的示意图。
17.图3为角度及位移控制机构的示意图。
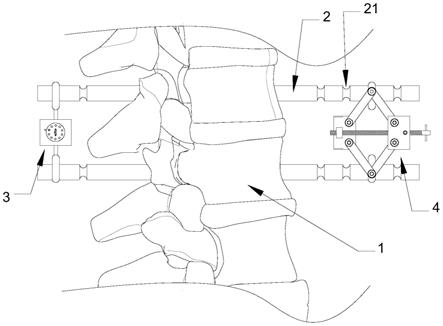
18.图4为相邻的椎骨的连接示意图。
19.图5为限位按钮的限位示意图。
20.图中:
21.1、椎骨,2、连接杆,3、力度控制机构,4、角度及位移控制机构,
22.21、连接凹槽,
23.31、力度连接块,32、连接绳,33、力度连接环,34、力度控制旋钮,35、限位孔,36、限位按钮,37、缓冲弹簧,
24.41、角度连接环,42、菱形角度调节框,43、角度调节螺母,44、调节螺杆。
具体实施方式
25.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能
更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
26.参见附图1-5所示,本实施例中的一种用于模拟脊柱不稳的装置,包括椎骨1,椎骨1设置至少两个,在每个椎骨1上设置连接杆2,连接杆为穿越双侧椎弓根及椎体的传统椎弓根螺钉的前后加长版,在连接杆2的一端设置力度控制机构3,在连接杆2的另一端设置角度及位移控制机构4,且相邻的连接杆2之间通过力度控制机构3调节相邻的两个椎骨1之间的力度,相邻的连接杆2之间还通过角度及位移控制机构4调节相邻的两个椎骨1之间的角度。
27.进一步的,力度控制机构3包括力度连接块31,力度连接块31内通过连接绳32设置力度连接环33,且连接绳32还与力度控制旋钮34连接,且力度控制旋钮34能将连接绳32缠绕在力度控制旋钮34上,力度连接环33设置两个,且对称设置在力度连接块31的两侧,且两个力度连接环33对应的连接绳32均位于同一个力度控制旋钮34上。通过同一个力度连接块31控制相邻的两个椎骨1之间的力度,继而模拟位置的椎骨1间的力量大小,保证模拟的准确。
28.进一步的,力度控制旋钮34上还设置有呈圆形分布的多个限位孔35,且在其中一个限位孔35内设置限位按钮36,且限位按钮36通过缓冲弹簧37设置在力度连接块31上,且在缓冲弹簧37的弹力作用下,限位按钮36能与其中一个限位孔35配合,在外力按压限位按钮36时,限位按钮36能与限位孔35分离。需要力度控制时,限位按钮36按下,通过力度控制旋钮34控制连接绳32的力量大小,当到达指定位置后,松开限位按钮36,在缓冲弹簧37的作用下,限位按钮36弹出并卡在限位孔35内,实现限位。
29.进一步的,角度及位移控制机构4包括两个角度连接环41,且两个角度连接环41之间设置菱形角度调节框42,且菱形角度调节框42的四个边角处分别铰接,且菱形角度调节框42的呈对角线的两个边角分别铰接一个角度连接环41,且在菱形角度调节框42的另一个呈对角线的两个边角分别设置角度调节螺母43,且两个角度调节螺母43之间通过调节螺杆44连接,且在外力旋转时,两个角度调节螺母43之间的距离能变大或变小。通过菱形角度调节框42的设置,能对相邻的两个椎骨1之间的角度进行调节,方便模拟不同病人的脊柱不稳的情况。
30.进一步的,在连接杆2上设置多个连接凹槽21,且多个连接凹槽21呈等间距分布,且连接凹槽21能设置力度连接环33和角度连接环41。即通过连接凹槽21的设置,方便对力度连接环33和角度连接环41的不同位置的调整,继而更好的模拟不同病人的位置的不同。
31.进一步的,椎骨1在竖直方向设置。即整体来看,椎骨1是呈竖直设置的,当然针对不同病人的情况,其突出状态,角度倾斜是不同的,因此针对此情况,进行不同位置的调整。
32.进一步的,连接杆2横向贯穿椎骨1,在椎骨1的一侧设置力度控制机构3,在椎骨1的另一侧设置角度及位移控制机构4。具体的说,在椎骨1的前端进行力量控制,在椎骨1的后端进行角度控制,同时配合多个连接凹槽21的设置,也能实现在水平面的平移,至此实现了椎骨1的模型建立。
33.进一步的,椎骨1采用3d打印成型或人体标本或动物椎体标本。按照具体人体构造,对应的进行椎骨1的模型建立,当然在具体到个人时,也可以根据个人差异,针对性的进行椎骨1的模型,继而实现精准的判断。3d打印技术即快速成型技术的一种,又称增材制造,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术,3d打印通常是采用数字技术材料打印机来实现的。常在模具制造、
工业设计等领域被用于制造模型,后逐渐用于一些产品的直接制造,已经有使用这种技术打印而成的零部件。
34.一种用于模拟脊柱不稳的装置的有益效果是,通过在相邻的椎骨1之间设置力度控制机构3和角度及位移控制机构4,通过这两个机构控制两个椎骨1之间的力度、角度变化,实现对人体椎骨1的模拟,建立高准确度的脊柱模型,实现了脊柱不稳的模拟,为病例的治疗提供了准确的信息指引。
35.在一实施例中:脊柱不稳模型包括:
36.椎骨1,椎骨1设置至少两个,在每个椎骨1上设置连接杆2;
37.力度控制机构3,力度控制机构3设置在连接杆2的一端,且相邻的连接杆2之间通过力度控制机构3调节相邻的两个椎骨1之间的力度;
38.角度及位移控制机构4,角度及位移控制机构4设置在连接杆2的另一端,且相邻的连接杆2之间还通过角度及位移控制机构4调节相邻的两个椎骨1之间的角度。
39.在一实施例中,力度控制机构3包括力度连接块31,力度连接块31内通过连接绳32设置力度连接环33,且连接绳32还与力度控制旋钮34连接,且力度控制旋钮34能将连接绳32缠绕在力度控制旋钮34上,力度连接环33设置两个,且对称设置在力度连接块31的两侧,且两个力度连接环33对应的连接绳32均位于同一个力度控制旋钮34上。
40.在一实施例中,力度控制旋钮34上还设置有呈圆形分布的多个限位孔35,且在其中一个限位孔35内设置限位按钮36,且限位按钮36通过缓冲弹簧37设置在力度连接块31上,且在缓冲弹簧37的弹力作用下,限位按钮36能与其中一个限位孔35配合,在外力按压限位按钮36时,限位按钮36能与限位孔35分离。
41.在一实施例中,角度及位移控制机构4包括两个角度连接环41,且两个角度连接环41之间设置菱形角度调节框42,且菱形角度调节框42的四个边角处分别铰接,且菱形角度调节框42的呈对角线的两个边角分别铰接一个角度连接环41,且在菱形角度调节框42的另一个呈对角线的两个边角分别设置角度调节螺母43,且两个角度调节螺母43之间通过调节螺杆44连接,且在外力旋转时,两个角度调节螺母43之间的距离能变大或变小。
42.在一实施例中,在连接杆2上设置多个连接凹槽21,且多个连接凹槽21呈等间距分布,且连接凹槽21能设置力度连接环33和角度连接环41。
43.在一实施例中,椎骨1在竖直方向设置。
44.在一实施例中,连接杆2横向贯穿椎骨1,在椎骨1的一侧设置力度控制机构3,在椎骨1的另一侧设置角度及位移控制机构4。
45.在一实施例中,椎骨1采用3d打印成型。
46.在一实施例中,参见附图5,限位按钮36通过延长杆连接,通过按压限位按钮36上方的延长部分,限位按钮36的突出部分会进入限位孔35下方,此时能对力度控制旋转进行旋转,而且连接绳32分别设置在不同位置,防止二者在调节力度时发生缠绕,保证力度的控制。
47.在一实施例中,参见附图1-4,按照人体的脊柱使用3d打印进行椎骨1的打印,在打印之后,左右贯穿设置连接杆2,且在连接杆2的左端设置两组连接凹槽21,在连接杆2的右端设置四组连接凹槽21,在左端的相邻的连接杆2的连接凹槽21内设置力度控制机构3,同时在右端的相邻的连接杆2的连接凹槽21内设置角度及位移控制机构4,同时病人的ct扫
描,得出病人的脊柱不稳的状态,同时在此模型上进行模拟,左端的力度控制机构3,通过力度控制旋钮34的旋转,控制两个力度连接环33的力量大小,进而控制两个椎骨1之间的压力大小,同时右侧的角度及位移控制机构4通过菱形角度调节框42对两个椎骨1的角度进行调整,参见附图1,当两个角度调节螺母43靠近时,两个椎骨1呈以左端为端点,且角度逐渐变大,当两个角度调节螺母43远离时,两个椎骨1呈以右端为端点,且角度组件变大。
48.上述进行力度和角度的模拟,但是脊柱不稳时,还会出现椎骨1错位的现象,当出现椎骨1错位时,通过在水平面内对椎骨1进行错位,同时错位使用连接凹槽21即可实现,后续的角度和力度的调整也可实现。
49.以上实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人了解本发明的内容并加以实施,并不能以此限制本发明的保护范围,凡根据本发明精神实质所做的等效变化或修饰,都应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。