1.本发明涉及水下航行器领域,尤其涉及一种自主水下航行器指定点漂浮模式的控制方法。
背景技术:
2.自主水下航行器(autonomous underwater vehicle,auv)是一种无人、无缆式水下机器人,具有自主导航、自主航行的功能,可通过搭载不同的设备实现不同的水下探测任务,如水下目标探测、水底成像、水下摄像、水文数据采集等。
3.通常auv在执行完任务后会漂浮在水面,等待操控人员下达下一个任务。如果操控人员需要较长时间才下达任务,则auv将长时间漂浮在水面上,此时如果没有人为干预,auv将随着风浪或者流飘走。
4.本发明提出一种指定点漂浮模式,在该模式下,auv只要超出指定点为圆心一定半径,auv能自主航行到指定点。在公开的文献、期刊中还没有这种方式。现有技术只能通过人为实时监测auv在水面的状态,当auv飘走时,需要人为干预,让auv航行到指定位置。
技术实现要素:
5.本发明目的在于针对现有技术的不足,提出一种自主水下航行器指定点漂浮模式的控制方法,实现无需人为监测、干预,auv能自主检测当前位置,并判断当前位置与指定点的距离,当超出一定距离后,auv能自主航行到指定点的方法。
6.本发明的目的是通过以下技术方案来实现的:一种自主水下航行器指定点漂浮模式的控制方法,该方法步骤如下
7.(1)auv当前位置(x,y)更新时,auv实时计算当前位置与漂浮模式的指定点坐标(x0,y0)的距离d;
8.(2)将距离d与预设的指定点漂浮的区域半径d作比较;若d≤d,则返回步骤(1),若d>d,执行步骤(3),
9.(3)执行auv航行到指定点任务,具体过程如下:
10.(3.1)auv计算当前位置(x,y)与指定点坐标(x0,y0)的角度α,作为auv定向航行的角度,并设定到达指定点的半径r,r<d;
11.(3.2)auv朝角度α自主定向航行;并实时计算当前位置(x,y)与指定点坐标(x0,y0)的距离d;
12.(3.3)若d≤r,则判定auv已经到达指定点,任务结束;若d>r,则判断任务执行时间是否超过执行任务的最大时间阈值;若未超过,则返回步骤(3.2);若超过,则执行任务超时,任务结束;
13.(3.4)任务结束后继续执行步骤(1)。
14.进一步地,步骤(3.3)中,若执行任务超时,则任务结束,若此时d<d,则认为auv已经到达了漂浮区域范围内,并将d作为下一次到达指定点的半径r,即r=d;若d≥d,则auv还
没有达到指定点漂浮范围内,将d作为下一次指定点漂浮的区域半径d,即d=d。本发明的有益效果:本发明的优点是无需人为干预,auv能自主监测当前位置与指定点的距离,只要auv超出指定点为圆心一定半径,auv能自主航行到指定点;并能根据实际航行情况,自适应地更新到达指定点的半径和指定点漂浮的区域半径。
附图说明
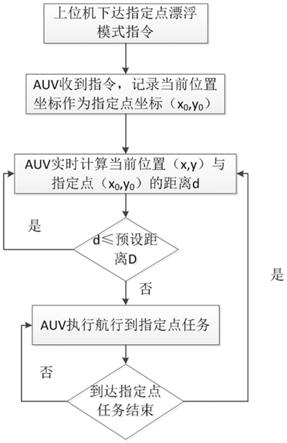
15.图1为auv指定点漂浮模式流程图;
16.图2为指定点漂浮模式示意图;
17.图3为auv执行航行到指定点任务流程图;
18.图4为航行角度示意图。
具体实施方式
19.以下结合附图对本发明具体实施方式作进一步详细说明。
20.本发明提供了一种自主水下航行器指定点漂浮模式的控制方法,auv只要超出指定点为圆心一定半径,auv能自主航行到指定点,无需人为干预;本发明具体流程图如图1所示,示意图如图2所示,(x0,y0)为指定点坐标,(x,y)为auv实时坐标,d为auv实时坐标与指定点坐标的距离,d为预设区域半径。本发明方法具体过程如下:
21.1)上位机给auv下达指定点漂浮模式指令,auv收到指令后,记录auv当前所在的位置,作为指定点的坐标(x0,y0);
22.2)auv实时计算当前位置(x,y)与(x0,y0)的距离d,
[0023][0024]
3)若d≤d,说明auv在指定漂浮范围内,继续实时监测;若d>d,说明auv超出了指定漂浮范围,需要执行航行到指定点任务;
[0025]
4)执行航行到指定点任务,即auv从当前位置自主航行到指定点;若到达指定点任务结束,则auv继续实时监测当前位置与指定点位置的距离。auv执行航行到指定点任务流程图如图3所示,任务执行前记录初始时刻t0,t为预设的执行任务的最大时间,r为预设到达指定点的半径(r<d):
[0026]
a)auv计算当前位置(x,y)与指定点坐标(x0,y0)的角度α,作为auv定向航行的角度,如图4所示;
[0027]
b)auv朝角度α自主定向航行;
[0028]
c)auv实时计算当前位置(x,y)与(x0,y0)的距离d;
[0029]
d)若d≤r,则判定auv已经到达指定点,任务结束。若d>r,则auv还未到达指定点,此时判断执行时间t-t0是否超过执行任务的最大时间t,其中t为当前时间。若t-t0<t,则继续执行航行到指定点任务;若t-t0≥t,则执行任务超时,任务结束,若此时d<d,则认为auv已经到达了漂浮区域范围内,并将d作为下一次到达指定点的半径r,即r=d;若d≥d,则auv还没有达到指定点漂浮范围内,将d作为下一次指定点漂浮的区域半径d,即d=d;
[0030]
e)任务结束后回到步骤2)。
[0031]
上述实施例用来解释说明本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明作出的任何修改和改变,都落入本发明的保护范围。
技术特征:
1.一种自主水下航行器指定点漂浮模式的控制方法,其特征在于,该方法步骤如下(1)auv当前位置(x,y)更新时,auv实时计算当前位置与漂浮模式的指定点坐标(x0,y0)的距离d;(2)将距离d与预设的指定点漂浮的区域半径d作比较;若d≤d,则返回步骤(1),若d>d,执行步骤(3),(3)执行auv航行到指定点任务,具体过程如下:(3.1)auv计算当前位置(x,y)与指定点坐标(x0,y0)的角度α,作为auv定向航行的角度,并设定到达指定点的半径r,r<d;(3.2)auv朝角度α自主定向航行;并实时计算当前位置(x,y)与指定点坐标(x0,y0)的距离d;(3.3)若d≤r,则判定auv已经到达指定点,任务结束;若d>r,则判断任务执行时间是否超过执行任务的最大时间阈值;若未超过,则返回步骤(3.2);若超过,则执行任务超时,任务结束;(3.4)任务结束后继续执行步骤(1)。2.根据权利要求1所述的一种自主水下航行器指定点漂浮模式及控制方法,其特征在于,步骤(3.3)中,若执行任务超时,则任务结束,若此时d<d,则认为auv已经到达了漂浮区域范围内,并将d作为下一次到达指定点的半径r,即r=d;若d≥d,则auv还没有达到指定点漂浮范围内,将d作为下一次指定点漂浮的区域半径d,即d=d。
技术总结
本发明公开了一种自主水下航行器指定点漂浮模式的控制方法,AUV实时计算与漂浮的指定点的距离,与指定点漂浮的区域半径作比较;当超过区域半径时执行AUV航行到指定点任务,设定到达指定点的半径;AUV朝指定点定向航行;并实时计算与指定点的距离;AUV到达指定点范围内,则任务结束,继续监测,若执行任务时间超过最大时间;则任务结束,并更新到达指定点的半径或者更新指定点漂浮的区域半径。本发明无需人为干预,AUV能自主监测当前位置与指定点的距离,只要AUV超出指定点为圆心一定半径,AUV能自主航行到指定点,并能根据实际航行情况,自适应地更新到达指定点的半径和指定点漂浮的区域半径。浮的区域半径。浮的区域半径。
技术研发人员:张明
受保护的技术使用者:浙江九段智能科技有限公司
技术研发日:2021.12.15
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
