1.本发明属于建筑科学与工程领域,特别涉及一种冰雪建筑智能建造与运维控制系统。
背景技术:
2.冰雪建筑作为一种以冰、雪作为主要建造材料的建筑形式,其具有悠久的历史,几乎在世界各地的寒冷区域都有其独特的冰雪建筑。从14000年前加拿大北部靠近北极地区的极地因纽特人用于居住的igloo到现代冰砌体结构、冰壳结构,冰雪建筑的功能从满足人类生存需要逐渐转变为人们艺术欣赏和实用体验的一种方式,因此冰雪建筑是现代冰雪产业的重要组成部分。
3.目前,主要采用充气膜 喷射式施工方法进行人工建造冰雪建筑,但是建造冰雪建筑时需要长时间低温作业,导致人为建造难度较大,结构形态控制精度不足,对于造型复杂,曲率较为丰富的结构形态,充气膜找形难以实现。而现有砌筑式、装配式施工方法虽然能够尽可能地减少湿作业量问题,但无法避免因节点复杂、低温建造等所带来的施工影响。
技术实现要素:
4.本发明目的是为了解决目前的冰雪建筑建造方法还存在由于结构形态控制精度不足从而无法喷射复杂节点同时由于长时间的低温环境施工,进而造成建造难度大的问题,而提出了一种冰雪建筑智能建造与运维控制系统。
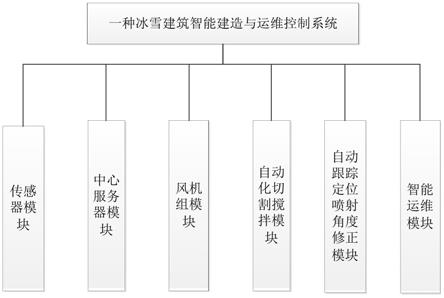
5.一种冰雪建筑智能建造与运维控制系统包括:传感器模块、中心服务器模块、风机组模块、自动化切割搅拌模块、自动跟踪定位喷射角度修正模块、智能运维模块;
6.所述传感器模块用于获取建造冰雪建筑的环境信息;
7.所述中心服务器模块用于接收传感器获取的环境信息并根据环境信息发送建造指令;
8.所述风机组模块包括多个风机,用于根据中心服务器的指令向充气膜内开始或停止输送风力;
9.所述自动化切割搅拌模块,包括:纸浆切割机和搅拌机;所述纸浆切割机用于根据中心服务器的指令开始或停止切割纸浆纤维复合物;所述搅拌机用于根据中心服务器的指令将纸浆切割机切割好的纸浆纤维复合物与水进行搅拌获得纸浆;
10.所述自动跟踪定位喷射角度修正模块,包括:离心泵、3d打印机械臂;所述离心泵用于将纸浆输送到3d打印机械臂中;所述3d打印机械臂用于根据中心服务器的指令向充气膜外表面开始或停止喷射纸浆;
11.所述3d打印机械臂包括:第一段臂、第二段臂;
12.所述第一段臂为竖直臂,其中下端在地面的机器人上,上端连接第二段臂;所述第二段臂的一端与第一段臂的上端相连,第二段臂的另一端连接机械臂喷头;
13.所述智能运维模块用于根据传感器获取的环境信息对建造好的冰雪建筑进行运
营、监控及维护。
14.本发明的有益效果为:
15.本发明将施工和运维设备与物联网联系在一起利用中心服务器控制基于物联网的风机机组自适应控制模块、自动化切割搅拌集成模块、自动跟踪定位喷射角度修正模块和智能运维管理模块,在建造全过程实现中心服务器集成实现智能施工,一定程度减少了低温条件下建造所需的人工成本。中心服务器确定喷射点位并控制自动跟踪定位喷射角度修正模块进行喷射实现复杂节点的喷射,提升了结构形态的控制精度,同时,本发明采用风机组实现冰雪建筑内的温度控制实现了冰雪建筑内的温度保持在预设范围内,解决了长时间低温建造冰雪建筑的问题,进而减小了建造难度。本发明利用智能运维模块对建造好的冰雪建筑进行运营和监测,根据监测的数据对冰雪建筑进行维护,延长了冰雪建筑的寿命。
附图说明
16.图1为本发明模块图;
17.图2是获取3d打印机械臂最佳喷射位置流程图。
具体实施方式
18.具体实施方式一:本实施方式一种冰雪建筑智能建造与运维控制系统包括:传感器模块、中心服务器模块、风机组模块、自动化切割搅拌模块、自动跟踪定位喷射角度修正模块、智能运维模块;
19.所述传感器模块用于获取建造冰雪建筑的环境信息;
20.所述中心服务器模块用于接收传感器获取的环境信息并根据传感器获取的环境信息发送建造指令;
21.所述风机组模块包括多个风机,用于根据中心服务器的指令向充气膜内开始或停止输送风力;
22.所述自动化切割搅拌模块包括:纸浆切割机和搅拌机;所述纸浆切割机用于根据中心服务器的指令开始或停止切割纸浆纤维复合物;所述搅拌机用于根据指令将纸浆切割机切割好的纸浆纤维复合物和水进行搅拌获得纸浆;
23.所述自动跟踪定位喷射角度修正模块包括:离心泵、3d打印机械臂;所述离心泵用于将纸浆输送到3d打印机械臂中;所述3d打印机械臂用于根据中心服务器指令向充气膜外表面开始或停止喷射纸浆;
24.所述3d打印机械臂包括:第一段臂、第二段臂;
25.所述第一段臂为竖直臂,其中下端在地面的机器人上,上端连接第二段臂;所述第二段臂的一端与第一段臂的上端相连,第二段臂的另一端连接机械臂喷头;
26.所述智能运维模块用于根据传感器获取的环境信息对建造好的冰雪建筑进行监控及维护;
27.具体实施方式二:所述传感器模块包括:摄像头、气压传感器、温度传感器、距目标点位测距传感设备、超声测厚传感设备、风力风向传感监测设备、3d扫描仪、湿度传感器、光纤光栅传感器、应变片;
28.所述摄像头用于获取3d打印机械臂当前施工图像;
29.所述气压传感器用于获取充气膜内当前气压;
30.所述温度传感器用于获取场地环境当前温度;
31.所述距目标点位测距传感器设备用于获取3d打印机械臂喷头当前点位距离目标喷射点位的距离;
32.所述超声测厚传感器设备用于获取当前已喷射纸浆的厚度;
33.所述风力风向传感监测设备用于获取建造冰雪建筑场地的风力和风向;
34.所述3d扫描仪用于获取冰雪建筑结构实时的点位信息以及温度场;
35.所述湿度传感器用于获取冰雪建筑内当前湿度;
36.所述应变片用于获取冰雪建筑结构上某点的应变;
37.所述光纤光栅传感器用于监测冰雪建筑上某一区域的应变。
38.具体实施方式三:所述中心服务器模块包括:信号接收单元、气压控制单元、冷热风调节单元、图像输出单元、喷射角度和形式调节单元、切割比例控制单元、纸浆流量控制单元;
39.所述信号接收单元用于接收传感器获取的环境信息的信号;
40.所述气压控制单元用于根据充气膜内的气压控制风机启动/停止;
41.所述冷热风调节单元用于根据充气膜内的温度控制风机输出冷风或热风;
42.所述图像输出单元用输出3d打印机械臂上的摄像头拍摄到的施工过程实时进展、数据和模拟画面;
43.所述喷射角度和形式调节单元用于根据当前已喷射的纸浆厚度、最终需喷射纸浆厚度确定纸浆喷射状态和3d打印机械臂喷头最佳位置;
44.所述切割比例控制单元用于根据冰雪建筑结构应力控制纸浆纤维复合物与水的比例;
45.其中,纸浆纤维复合物质量与水质量的比值为2%-6%。
46.所述纸浆流量控制单元用于控制3d打印机械臂喷头喷射的纸浆喷射流量。
47.具体实施方式四:所述喷射角度和形式调节单元用于根据当前已喷射的纸浆厚度和最终需喷射纸浆厚度确定纸浆喷射状态和3d打印机械臂喷头最佳位置,通过以下方式实现:
48.步骤一、利用超声测厚传感器设备获取当前充气膜表面各个位置的已喷射的纸浆厚度;
49.步骤二、将充气膜表面各个位置的已喷射纸浆厚度与最终需喷射纸浆厚度进行比较,获取小于最终需喷射纸浆厚度的位置即为目标喷射点位,然后中心服务器控制3d打印机械臂喷头移动到距离目标喷射点位最佳位置并修正,如图2;
50.所述最佳位置分为:高位置处的最佳位置和低位置处的最佳位置;
51.所述高位置为3d打印机械臂伸直后达到的最高位置再加20cm的位置以上的位置;
52.所述低位置为3d打印机械臂伸直后达到的最高位置再加20cm的位置以下的位置;
53.所述低位置不需要考虑风速、重力作用等因素的影响,因此低位置的最佳位置为喷头朝向喷射目标点且距离15-20cm的位置喷射即可;
54.高位置需要考虑风速和重力作用的影响,因此高位置最佳位置分为水平夹角和竖直夹角;
55.所述水平夹角为:扇形喷头其中一条侧边缘与第二段机械臂的夹角;
56.所述竖直夹角为:第一臂与第二臂的夹角;
57.所述高位置最佳位置通过以下方式获得:
58.首先,确定竖直夹角:
59.s101、利用纸浆落点位置、纸浆落点速度方向、目标喷射点位确定纸浆喷射抛物线;
60.s102、根据纸浆落点速度方向获取纸浆落点水平速度和纸浆落点竖直速度v;
61.s103、获取纸浆落点位置纵坐标与喷头位置纵坐标的差s;
62.s104、利用纸浆落点的竖直速度v和纸浆落点位置纵坐标与喷头位置纵坐标的差s获取喷头喷射纸浆时的竖直速度v0和喷射的纸浆滴落时间t:
[0063][0064]
v=v0 at
[0065]
其中,a是重力加速度;
[0066]
s105、利用v0和纸浆落点的水平速度获取竖直夹角;
[0067]
然后,利用纸浆落点的水平速度确定水平夹角:
[0068]
s201,初始化风速矢量并乘以折减系数获得折减后的风速矢量;
[0069]
所述风速矢量包括:风速方向、风速大小;
[0070]
所述折减系数根据经验获得;
[0071]
s202、根据纸浆落点的水平速度、折减后的风速矢量、纸浆速度方向利用平行四边形法则确定喷头喷射方向即确定水平夹角;
[0072]
所述纸浆速度方向为:目标喷射点和喷头点位连线的方向。
[0073]
利用水平夹角和竖直夹角即可获得高位置除的最佳喷射位置;
[0074]
修正3d打印机械臂喷头的位置具体过程为:根据目前实际风力获取实际风速矢量,并根据实际风速矢量获取实际最佳位置;
[0075]
步骤三、根据目前还需喷射的纸浆厚度确定纸浆喷射状态:
[0076]
利用当前已喷射的纸浆厚度确定目前喷射好的结构应力,若目前喷射好的结构应力大于预设应力阈值则为承载阶段则用雾状喷射纸浆;若目前喷射好的结构应力小于预设应力阈值则为施工初期以水滴状态喷射纸浆。
[0077]
具体实施方式五:所述气压控制单元用于根据充气膜内的气压控制风机启动或停止,通过以下方式控制:
[0078]
中心服务器的信号接收单元根据气压传感器获取充气膜内当前的气压;若当前气压高于预设气压阈值,则停止输出风力,若当前气压低于预设气压阈值则控制风机开始输出风力,直至充气膜内的气压达到预设气压阈值;
[0079]
所述预设气压阈值范围为400-500pa。
[0080]
具体实施方式六:所述切割比例控制单元用于根据冰雪建筑结构应力控制纸浆纤维复合物与水的比例,通过以下方式控制:
[0081]
首先,中心服务器根据冰雪建筑结构应力确定切割机需要切割的纸浆纤维复合物的量;
[0082]
然后,计算需要切割纸浆纤维复合物需要的时间,并根据所需时间控制纸浆切割机开始或停止;
[0083]
最后,输入与纸浆纤维复合物根据预设比例输入水,并控制搅拌机进行搅拌,获得比例合适的纸浆;
[0084]
所述预设比例为:纸浆纤维复合物质量与水质量的比值为2%-6%。
[0085]
具体实施方式七:所述纸浆流量控制单元用于控制3d打印机械臂喷头喷射的纸浆喷射流量,如下:
[0086]
q=vs
[0087]
其中,q是纸浆喷射流量,v是纸浆喷射流速,s是喷头横截面积。
[0088]
具体实施方式八:所述智能运维模块包括:显示单元、结构监测单元、环境监测单元;
[0089]
所述显示单元用于显示冰雪建筑内的温度、湿度、风力、风向,可供游客了解冰雪建筑内的各种数据,结构内部的人居环境舒适;
[0090]
所述结构监测单元用于监测建造好的冰雪建筑结构是否准确以及是否需要进行维护:
[0091]
首先,根据冰雪建筑的材料获取理论应力,将理论应力分别乘以50%和70%获得应力范围;
[0092]
然后,获取建造好的冰雪建筑的实际应力:
[0093]
step1、根据应变片和光纤光栅传感器获得的冰雪建筑内的应变计算各个位置的应力;
[0094]
step2、根据3d扫描仪获得的冰雪建筑的内的各个点位的应力;
[0095]
step3、将step1和step2获得的每个点位的应力分别取最大值获得每个点位的最大应力即为实际应力;
[0096]
最后,将每个点位的实际应力和应力范围进行比较,当实际应力小于应力范围,则冰雪建筑准确目前不需维护;当实际应力大于应力范围,则冰雪建筑不准确需要进行维护;
[0097]
所述环境监测单元用于监测目前冰雪建筑内的温度是否在预设范围内并进行维护。
[0098]
具体实施方式九:所述环境监测单元用于监测目前冰雪建筑内的温度是否在预设温度阈值范围内并进行维护,通过以下方式维护:
[0099]
中心服务器的信号接收单元根据温度传感器和3d扫描仪获取冰雪建筑内的温度,若温度高于预设温度阈值,则控制风力吹冷风直至温度达到温度阈值;若温度低于预设温度阈值,则控制风机吹热风直至温度达到温度阈值;
[0100]
所述预设温度阈值为-10℃~15℃。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。