1.本发明涉及圆锯片基本加工技术领域,具体涉及一种圆锯片智能化整平方法。
背景技术:
2.圆锯片是木材、石材、金属等加工的基本工具,具有效率高、使用简单、维修方便、移动便利等优点,圆锯片在锯切的过程中,外缘不可避免会产生温升,热量逐渐向圆锯片法兰盘附近传导,沿圆锯片径向形成温度梯度。当圆锯片外缘温度升高到一定程度的时候,圆锯片基体会产生共振失稳变形,很快就会导致圆锯片烧锯失效。为了尽可能避免上述现象的发生,圆锯片生产过程中要进行适张处理,使其内部生成预应力场,去抵消切削热量造成的不良影响,经过适张处理后,圆锯片均要进行人工整平处理来保证其具有较高的平面度。
3.现有技术中,整平环节主要依靠工人的操作经验,也是制约圆锯片产能与质量性能的瓶颈环节,人工对圆锯片进行整平使得圆锯片的整合过程的生产效率低,并且不能保证圆锯片的整平效果。
技术实现要素:
4.为此,本发明提供一种圆锯片智能化整平方法,有效的解决了现有技术中圆锯片整合过程生产效率低、以及圆锯片整平效果未得到保证的问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:一种圆锯片智能化整平方法,包括以下步骤:
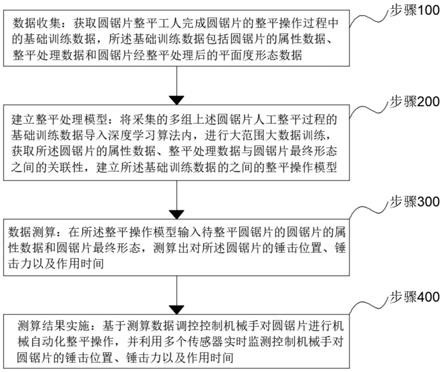
6.步骤100,数据收集:获取圆锯片整平工人完成圆锯片的整平操作过程中的基础训练数据,所述基础训练数据包括圆锯片的属性数据、整平处理数据和圆锯片经整平处理后的平面度形态数据;
7.步骤200,建立整平处理模型:将采集的多组上述圆锯片人工整平过程的基础训练数据导入深度学习算法内,进行大范围大数据训练,获取所述圆锯片的属性数据、整平处理数据与圆锯片最终形态之间的关联性,建立所述基础训练数据的之间的整平操作模型;
8.步骤300,数据测算:在所述整平操作模型输入待整平圆锯片的圆锯片的属性数据和圆锯片最终形态,测算出对所述圆锯片的锤击位置、锤击力以及作用时间;
9.步骤400,测算结果实施:基于测算数据调控控制机械手对圆锯片进行机械自动化整平操作,并利用多个传感器实时监测控制机械手对圆锯片的锤击位置、锤击力以及作用时间。
10.作为本发明的优选方案,所述圆锯片的属性数据包括圆锯片设计信息、材质特性、初始应力场和初始形态,所述整平处理数据包括锤击位置、锤击力和作用时间。
11.作为本发明的优选方案,将采集的多组上述圆锯片人工整平过程的基础训练数据导入深度学习算法进行训练的操作步骤为:将圆锯片设计信息、材质特性、初始应力场、初始形态、锤击位置、锤击力、作用时间均作为输入信息,将圆锯片最终形态作为输出信息进行多次训练,以确定获取所述圆锯片的属性数据、整平处理数据与圆锯片最终形态之间的
关联性。
12.作为本发明的优选方案,在数据采集过程中,所述圆锯片设计信息、所述材质特性为已知信息,所述计算机在数据采集时对所述圆锯片设计信息和所述材质特性数据进行录入。
13.作为本发明的优选方案,在数据采集过程中,所述初始应力场、所述初始形态、所述锤击位置、所述锤击力、所述作用时间、所述圆锯片最终形态为测试信息。
14.作为本发明的优选方案,通过应力测试装置获取圆锯片基体的所述初始应力场,采用平面度测试装置获取圆锯片基体的所述初始形态,采用力传感器获取整平力锤的锤击位置、锤击力与作用时间。
15.作为本发明的优选方案,所述应力测试装置、所述平面度测试装置、所述力传感器均与所述计算机通讯连接,并将初始状态下测量的所述初始应力场、所述初始形态、所述锤击位置、所述锤击力、所述作用时间、所述圆锯片最终形态的数据传输至所述计算机。
16.作为本发明的优选方案,在数据测算过程中,所述圆锯片设计信息、所述材质特性、所述初始应力场、所述初始形态以及所述圆锯片最终形态为已知信息,所述计算机在数据测算过程中对所述圆锯片设计信息、所述材质特性、所述初始应力场、所述初始形态以及所述圆锯片最终形态数据进行录入。
17.本发明与现有技术相比较具有如下有益效果:
18.本发明提出一种圆锯片智能化整平方法,利用大数据与算法处理得出整平操作模型,使得计算机根据整平操作模型测算出与已知数据对应的实施数据并控制机械手自动化完成圆锯片的整平工序,实现了圆锯片平面度的精准控制和智能化整平,提高了圆锯片的生产效率与产品质量,降低了劳动力成本。
附图说明
19.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
20.图1为本发明实施例提供的一种圆锯片智能化整平方法的流程图。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.如图1所示,本发明提出一种圆锯片智能化整平方法,利用大数据与机器学习的算法处理得出整平操作模型,使得计算机根据整平操作模型测算出与已知数据对应的实施数据并控制机械手自动化完成圆锯片的整平工序,实现了圆锯片平面度的精准控制和智能化整平,提高了圆锯片的生产效率与产品质量,降低了劳动力成本。
23.本发明提出的一种圆锯片智能化整平方法,包括以下步骤:
24.步骤100,数据收集:获取圆锯片整平工人完成圆锯片的整平操作过程中的基础训练数据,基础训练数据包括圆锯片的属性数据、整平处理数据和圆锯片经整平处理后的平面度形态数据;
25.步骤200,建立整平处理模型:将采集的多组上述圆锯片人工整平过程的基础训练数据导入深度学习算法内,进行大范围大数据训练,获取圆锯片的属性数据、整平处理数据与圆锯片最终形态之间的关联性,建立基础训练数据的之间的整平操作模型;
26.步骤300,数据测算:在整平操作模型输入待整平圆锯片的圆锯片的属性数据和圆锯片最终形态,测算出对圆锯片的锤击位置、锤击力以及作用时间;
27.步骤400,测算结果实施:基于测算数据调控控制机械手对圆锯片进行机械自动化整平操作,并利用多个传感器实时监测控制机械手对圆锯片的锤击位置、锤击力以及作用时间。
28.本发明中在数据采集阶段,工人每完成一张圆锯片的整平操作,即可获取一组基础训练数据,本实施例中为了使得整平操作模型更加精确,在数据采集阶段尽量采集大量的数据进行数据处理形成整平操作模型,在实际应用中要求数据组数不少于10000组。
29.本实施例中,圆锯片的属性数据包括圆锯片设计信息、材质特性、初始应力场和初始形态,整平处理数据包括锤击位置、锤击力和作用时间。
30.将采集的多组上述圆锯片人工整平过程的基础训练数据导入深度学习算法进行训练的操作步骤为:将圆锯片设计信息、材质特性、初始应力场、初始形态、锤击位置、锤击力、作用时间均作为输入信息,将圆锯片最终形态作为输出信息进行多次训练,以确定获取圆锯片的属性数据、整平处理数据与圆锯片最终形态之间的关联性。
31.在不同的步骤过程中需要录入和采集的数据有所不同,在数据采集过程中,圆锯片设计信息、材质特性为已知信息(不论在实际操作过程中初始应力场、初始形态、锤击位置、锤击力、作用时间、圆锯片最终形态数据如何变化,圆锯片设计信息、材质特性数据为已知信息均不变),在数据采集过程中,计算机对圆锯片设计信息和材质特性数据进行录入。
32.除上述圆锯片设计信息、材质特性数据外,在数据采集过程中,初始应力场、初始形态、锤击位置、锤击力、作用时间、圆锯片最终形态为测试信息,需要在人工整平过程中采用测试设备进行测试采集数据。
33.具体的测试设备如下,通过应力测试装置获取圆锯片基体的初始应力场,采用平面度测试装置获取圆锯片基体的初始形态,采用力传感器获取整平力锤的锤击位置、锤击力与作用时间,本实施例中将力传感器设置为多个,可以根据某个力传感器采集到的力的数据判断出整平力锤的锤击位置。
34.为了对初始应力场、初始形态、锤击位置、锤击力、作用时间、圆锯片最终形态数据进行采集,应力测试装置、平面度测试装置、力传感器均与计算机通讯连接,并将初始状态下测量的初始应力场、初始形态、锤击位置、锤击力、作用时间、圆锯片最终形态的数据传输至计算机。
35.在数据测算过程中,我们就需要测算出对一个圆锯片施加理想的锤击力大小、作用时间和锤击位置,因此此种情况下,圆锯片设计信息、材质特性、初始应力场、初始形态以及圆锯片最终形态为已知信息,计算机在数据测算过程中对圆锯片设计信息、材质特性、初始应力场、初始形态以及圆锯片最终形态数据进行录入,录入之后计算机根据待整平圆锯
片的设计信息、材质特性、初始应力场、初始形态以及圆锯片最终形态,测算出所需的锤击位置、锤击力以及作用时间。
36.本发明中步骤200的算法可采用bp神经网络,bp神经网络初次通过输入信息和输出信息训练得出整平操作模型,此时将该整平操作模型预设为理想模型,bp神经网络根据训练得到的结果与预想结果进行误差分析,进而修改权值和阈值,一步一步得到能输出和预想结果一致的整平操作模型,也就是说在测算锤击位置、锤击力以及作用时间的过程中,不断修改锤击位置、锤击力以及作用时间的数据以使训练得到的模型与整平操作模型一致,此时通过得到的锤击位置、锤击力以及作用时间设置相应的整平力锤的打击位置、打击力度和打击周期(打击时间),即可得到所预设圆锯片最终形态数据一致的圆锯片。
37.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。