1.本发明涉及深海打捞领域,具体涉及一种双体式深海打捞作业船。
背景技术:
2.海中沉积层是指海水运动所带来的泥沙与海洋生物的遗骸所共同形成的特殊地层,覆盖洋度的沉积层厚度介于0~4000米之间,而且在深水海盆沉积可能更厚一些,整个世界海洋沉积的平均厚度为300米。在海底,沉没物通常位于沉积层上。
3.水下打捞就是打捞沉没于水中物体的工程,包括打捞船舶、飞行器、货物等。在航道、港口水域中的打捞作业,可达到清理通航障碍物的目的。目前,深海打捞中对于沉没于水中体积较大的物体主要有两种方式,一种是通过采用钩爪进行抓取的方式进行打捞,在钩爪抓取的过程中容易造成沉没物破损,从而在沉没物从水中提取出的过程中出现沉没物进一步损坏的情况。另一种是通过将钢缆兜于沉没物的底下,用打捞船上的起重设备将沉没物提起,该方式打捞时一般要用两艘或多艘打捞船共同作业,协作工作要求高,且将钢缆兜于沉没物的底下的过程中需要先进行海底钻孔再进行吊索穿入,工作繁琐且效率低下。
技术实现要素:
4.本发明的目的在于提供一种提高打捞效率的双体式深海打捞作业船。
5.本发明解决上述问题所采用的技术方案是:
6.一种双体式深海打捞作业船,包括船体和打捞装置,船体通过缆式起重装置将打捞装置从船体上竖直下沉至海底,打捞装置包括左驱动座、右驱动座以及位于左驱动座和右驱动座之间的螺旋轨,左驱动座和右驱动座相互平行设置,左驱动座和右驱动座上均设有驱动件和用于驱动驱动件间歇移动的直线驱动装置,未使用时,螺旋轨的两端分别位于左驱动座和右驱动座的驱动件上,螺旋轨通过左驱动座和右驱动座上的驱动件实现螺旋轨在左驱动座和右驱动座之间以螺旋式递进的方式水平直线移动,螺旋轨的外侧面上开设有容纳槽,容纳槽内固定有锁环,锁环上设有用于封闭锁环上的开口的锁舌,锁舌的打开方向与锁环的移动方向相反,左驱动座上固定有若干等间距排布的拨动件,右驱动座上滑动连接有若干用于吊索连接且等间距排布的钩环件,拨动件的拨动销位于锁环向上移动时的轨迹上,钩环件的钩环位于锁环向下移动时的轨迹上。
7.打捞装置使用时,通过左驱动座和右驱动座上的驱动件共同驱动螺旋轨转动,使得螺旋轨的前端钻入海底的沉积层中,
8.当螺旋轨的后端从左驱动座上的驱动件脱离时,左驱动座上的直线驱动装置驱动左驱动座上的驱动件直线移动一段距离,右驱动座上的驱动件单独驱动螺旋轨继续转动钻入沉积层中,
9.然后当螺旋轨的前端钻出沉积层并与左驱动座上的驱动件适配时,左驱动座和右驱动座上的驱动件共同驱动螺旋轨转动钻出沉积层,在这一过程中,螺旋轨上的锁环与右驱动座上的钩环件的钩环抵住并使锁环上的锁舌转动,锁环上的开口打开使得钩环件和锁
环连接,从而使得钩环件上连接的吊索随螺旋轨的转动收纳于螺旋轨的容纳槽内,
10.随后当螺旋轨的后端从右驱动座上的驱动件脱离时,右驱动座上的直线驱动装置驱动右驱动座上的驱动件直线移动一段距离,左驱动座上的驱动件单独驱动螺旋轨继续转动钻出沉积层,
11.最后当螺旋轨的前端与右驱动座上直线移动后的驱动件适配时,左驱动座和右驱动座上的驱动件共同驱动螺旋轨转动钻出沉积层,直至螺旋轨的前端再次钻入沉积层内一段距离,在这一过程中,螺旋轨上的锁环与左驱动座上的拨动件的拨动销抵住并使锁环上的锁舌转动,锁环上的开口打开使得钩环件和锁环解除连接,从而达到将吊索兜于沉没物下的目的。
12.作为上述技术方案的进一步改进,所述船体的船身上设有下沉室,下沉室为竖直方向上的两端开口结构,打捞装置通过下沉室竖直沉入海中,下沉室的底端设有隔水闸,利于保障打捞装置下沉和上升过程的稳定性,避免了多船协作打捞的工作方式,降低了工作强度和工作要求,且减少了在沉没物打捞后转移输送过程中对沉没物造成的损伤。
13.作为上述技术方案的进一步改进,所述驱动件包括壳体、滑动件、左驱动轮以及右驱动轮,滑动件滑动连接于壳体上,左驱动轮插设并转动连接于滑动件上,右驱动轮转动连接于壳体上,左驱动轮和右驱动轮之间存在用于螺旋轨穿过的间隙,当螺旋轨位于左驱动轮和右驱动轮之间时,左驱动轮和右驱动轮均与螺旋轨接触,壳体上固定有第一驱动装置,第一驱动装置和右驱动轮之间通过齿轮传动机构实现传动连接,第一驱动装置和左驱动轮之间通过同步带传动机构实现传动连接。通过第一驱动装置、齿轮传动机构以及同步带传动机构三者配合使用,实现了左驱动轮和右驱动轮的同步反向转动,从而利于保障左驱动轮和右驱动轮同步驱动螺旋轨转动的效果。
14.作为上述技术方案的进一步改进,所述壳体上设有用于调节左驱动轮和右驱动轮之间距离的调节模块,调节模块包括转轴和用于驱动转轴转动的第二驱动装置,转轴转动连接于壳体上,第二驱动装置固定于壳体上,转轴上固定有凸轮和限位件,凸轮位于同步带传动机构中的同步带的环绕空间内且环绕空间的高度小于凸轮的最大转动直径,限位件为l形,限位件包括一体式连接的第一限位杆和第二限位杆,第一限位杆和第二限位杆上均开设有用于容纳滑动件的凹槽,左驱动轮和右驱动轮未转动时,第一限位杆在水平方向上抵住滑动件且第一限位杆的抵住方向和凸轮的凸出端的朝向相反。通过第二驱动装置驱动转轴转动90
°
来使得凸轮的凸出端能够抵住同步带,使得同步带传动机构中的两个同步带轮之间的距离减小,从而达到将螺旋轨夹于左驱动轮和右驱动轮之间的目的,提高了螺旋轨与左驱动轮、右驱动轮之间的摩擦,利于提高左驱动轮和右驱动轮的驱动效果。同时,当凸轮开始转动时,限位件同步转动,限位件的第一限位杆解除对滑动件的移动限制,使得滑动件在同步带的作用下滑动,并当凸轮转动90
°
时,滑动件位于第二限位杆的凹槽内,第二限位杆限制滑动件的移动,从而利于保障左驱动轮和右驱动轮同步驱动螺旋轨转动的稳定性。
15.作为上述技术方案的进一步改进,所述右驱动座上固定有若干数量与钩环件数量相同的基座单元,基座单元包括左基座和右基座,左基座和右基座上均开设有滑槽,钩环件的左右两端分别滑动于左基座和右基座的滑槽内,滑槽的开口端为喇叭状。通过基座单元的设置,利于在使用前保障钩环件在右驱动座上安装的准确性,同时通过滑槽的设置,在锁
环和钩环件的钩环抵住时由于基座单元对钩环件移动的限制使得钩环能够抵住锁舌并使其转动打开锁环上的开口,从而保障了锁环和钩环件之间的连接。
16.作为上述技术方案的进一步改进,所述左驱动座和右驱动座上均固定有若干等间距排布的定位单元,定位单元包括呈上下设置的第一定位组和第二定位组,处于同一驱动座上的驱动件位于第一定位组和第二定位组之间,第一定位组和第二定位组均由两个定位柱组成,两个定位柱之间形成漏斗状的导向通道,左驱动座上的导向通道的进口朝下设置,右驱动座上的导向通道的进口朝上设置。通过左驱动座和右驱动座上设置的定位单元,利于提高螺旋轨螺旋递进的稳定性,保障了螺旋轨移动过程中锁环、钩环件以及拨动件三者配合使用的准确性,从而使得吊索在沉没物底下的均匀排布。
17.作为上述技术方案的进一步改进,所述螺旋轨的左右两侧面上均开设有与其侧面的边沿相平行的驱动槽,螺旋轨位于驱动件上时,左驱动轮和右驱动轮分别位于螺旋轨的左右两侧面的驱动槽内,提高了左驱动轮和右驱动轮同步驱动螺旋轨转动的效果,且利于保障螺旋轨螺旋递进方向的准确性。
18.作为上述技术方案的进一步改进,所述左驱动座和右驱动座的两端分别通过第一连接座和第二连接座实现连接,使得打捞装置呈框架结构下沉至海底的沉积层上,保障了打捞装置在沉积层上放置的稳定性,利于保障打捞装置运作的稳定性。
19.作为上述技术方案的进一步改进,所述螺旋轨的两端中位于其移动轨迹的前端的一端上安装有钻头,利于提高螺旋轨在海底的沉积层中穿过的速率,降低了驱动件驱动螺旋轨转动的负担。
20.作为上述技术方案的进一步改进,所述左驱动座和右驱动座的两端上均固定有液压定位桩,保障了打捞装置在海底的沉积层上放置状态的稳定性,利于提高螺旋轨将吊索穿过沉积层来兜于沉没物底下的准确性。
21.本发明与现有技术相比,具有以下优点和效果:
22.本发明通过左驱动座和右驱动座上的驱动件和直线驱动装置配合使用,从而实现在螺旋轨螺旋递进的过程中将多条吊索兜于沉没物底下的效果,使用方便且保障了吊索在沉没物底下设置的准确性,利于保障打捞效率。
23.同时,通过螺旋轨螺旋递进过程中锁环、钩环件以及拨动件三者配合使用,从而实现吊索收纳于螺旋轨的容纳槽内并随同螺旋轨一同钻入和钻出沉积层,结构紧凑且避免了螺旋轨在沉积层中穿过的过程中出现钩环件从螺旋轨上脱落的情况,利于保障打捞装置将吊索兜于沉没物下的操作的稳定性。
24.进一步的,通过船体将打捞装置下沉于海底进行沉没物打捞,避免了多船协作打捞的工作配合要求,降低了工作难度和工作要求,利于提高工作效率。
附图说明
25.图1是本发明一种双体式深海打捞作业船未使用状态的结构示意图。
26.图2是本发明一种双体式深海打捞作业船使用状态一的结构示意图。
27.图3是本发明一种双体式深海打捞作业船使用状态二的结构示意图。
28.图4是图2中所示打捞装置的结构示意右侧视图。
29.图5是图2中所示打捞装置的结构示意左侧视图。
30.图6是图2中所示打捞装置的结构示意俯视图。
31.图7是图6中所示左驱动座内侧的结构示意图。
32.图8是图6中所示右驱动座内侧的结构示意图。
33.图9是打捞装置上锁环和钩环件之间配合使用的结构示意图。
34.图10是图8中所示钩环件的结构示意爆炸图。
35.图11是打捞装置上锁环和拨动件之间配合使用的结构示意图。
36.图12是图8中所示驱动件未使用时的内部结构示意图。
37.图13是图12中所示转轴上凸轮和限位件的结构示意图。
38.图14是图8中所示驱动件使用时的内部结构示意图。
39.其中,船体1,下沉室11,隔水闸12,打捞装置2,第一连接座21,第二连接座22,液压定位桩23,左驱动座3,拨动件31,拨动销32,右驱动座4,钩环件41,钩环42,基座单元43,左基座44,右基座45,滑槽46,螺旋轨5,容纳槽51,锁环52,锁舌53,驱动槽54,钻头55,驱动件6,壳体61,滑动件62,左驱动轮63,右驱动轮64,第一驱动装置65,齿轮传动机构66,同步带传动机构67,直线驱动装置7,调节模块81,转轴82,第二驱动装置83,凸轮84,限位件85,第一限位杆86,第二限位杆87,凹槽88,定位单元9,第一定位组91,第二定位组92,定位柱93,导向通道94,吊索95,卷索装置96,牵拉索97,沉没物98,沉积层99。
具体实施方式
40.下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
41.参见图1-图11,本实施例一种双体式深海打捞作业船,包括船体1和打捞装置2,船体1通过缆式起重装置将打捞装置2从船体1上竖直下沉至海底,打捞装置2包括左驱动座3、右驱动座4以及位于左驱动座3和右驱动座4之间的螺旋轨5,左驱动座3和右驱动座4相互平行设置,左驱动座3和右驱动座4上均设有驱动件6和用于驱动驱动件6间歇移动的直线驱动装置7,直线驱动装置7为板式输送机,未使用时,螺旋轨5的两端分别位于左驱动座3和右驱动座4的驱动件6上,螺旋轨5通过左驱动座3和右驱动座4上的驱动件6实现螺旋轨5在左驱动座3和右驱动座4之间以螺旋式递进的方式水平直线移动,螺旋轨5的外侧面上开设有容纳槽51,容纳槽51内固定有锁环52,锁环52上设有用于封闭锁环52上的开口的锁舌53,锁舌53的打开方向与锁环52的移动方向相反,左驱动座3上固定有若干等间距排布的拨动件31,右驱动座4上滑动连接有若干用于吊索连接且等间距排布的钩环件41,拨动件31的拨动销32位于锁环52向上移动时的轨迹上,钩环件41的钩环42位于锁环52向下移动时的轨迹上。
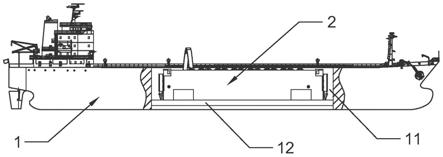
42.参见图1,所述船体1的船身上设有下沉室11,下沉室11为竖直方向上的两端开口结构,打捞装置2通过下沉室11竖直沉入海中,下沉室11的底端设有隔水闸12。
43.参见图3-图5,所述左驱动座3和右驱动座4的外侧面的两端上均固定有卷索装置96,四个卷索装置96上的牵拉索97的外端分别固定于沉积层上,降低了水流对打捞装置下沉过程中的影响,利于打捞装置的稳定下沉,保障了打捞装置在海底沉积层上放置的准确性,四根牵拉索97在沉积层上的固定点呈方形排布,沉没物位于四个固定点围成的方形区域内。本实施例中,卷索装置96为卷扬机。
44.参见图4、图5,所述左驱动座3和右驱动座4的两端上均固定有液压定位桩23。
45.参见图6,所述左驱动座3和右驱动座4的两端分别通过第一连接座21和第二连接座22实现连接。
46.参见图7、图8,所述左驱动座3和右驱动座4上均固定有若干等间距排布的定位单元9,定位单元9包括呈上下设置的第一定位组91和第二定位组92,处于同一驱动座上的驱动件6位于第一定位组91和第二定位组92之间,第一定位组91和第二定位组92均由两个定位柱93组成,两个定位柱93之间形成漏斗状的导向通道94,左驱动座3上的导向通道94的进口朝下设置,右驱动座4上的导向通道94的进口朝上设置。
47.参见图8,所述螺旋轨5的两端中位于其移动轨迹的前端的一端上安装有钻头55。
48.参见图7-图10,所述螺旋轨5的左右两侧面上均开设有与其侧面的边沿相平行的驱动槽54,螺旋轨5位于驱动件6上时,左驱动轮63和右驱动轮64分别位于螺旋轨5的左右两侧面的驱动槽54内。
49.参见图9、图10,所述右驱动座4上固定有若干数量与钩环件41数量相同的基座单元43,基座单元43包括左基座44和右基座45,左基座44和右基座45上均开设有滑槽46,钩环件41的左右两端分别滑动于左基座44和右基座45的滑槽46内,滑槽46的开口端为喇叭状。
50.参见图12-图14,所述驱动件6包括壳体61、滑动件62、左驱动轮63以及右驱动轮64,壳体61固定于板式输送机的环带上,滑动件62滑动连接于壳体61上,左驱动轮63插设并转动连接于滑动件62上,右驱动轮64转动连接于壳体61上,左驱动轮63和右驱动轮64之间存在用于螺旋轨5穿过的间隙,当螺旋轨5位于左驱动轮63和右驱动轮64之间时,左驱动轮63和右驱动轮64均与螺旋轨5接触,壳体61上固定有第一驱动装置65,第一驱动装置65为液压电机,第一驱动装置65和右驱动轮64之间通过齿轮传动机构66实现传动连接,第一驱动装置65和左驱动轮63之间通过同步带传动机构67实现传动连接。
51.参见图12-图14,所述壳体61上设有用于调节左驱动轮63和右驱动轮64之间距离的调节模块81,调节模块81包括转轴82和用于驱动转轴82转动的第二驱动装置83,第二驱动装置83为旋转气缸,转轴82转动连接于壳体61上,第二驱动装置83固定于壳体61上,转轴82上固定有凸轮84和限位件85,凸轮84位于同步带传动机构67中的同步带的环绕空间内且环绕空间的高度小于凸轮84的最大转动直径,限位件85为l形,限位件85包括一体式连接的第一限位杆86和第二限位杆87,第一限位杆86和第二限位杆87上均开设有用于容纳滑动件62的凹槽88,左驱动轮63和右驱动轮64未转动时,第一限位杆86在水平方向上抵住滑动件62且第一限位杆86的抵住方向和凸轮84的凸出端的朝向相反。
52.综上所述,本发明使用方法如下:
53.步骤一:打开隔水闸,将卷索装置上的牵拉索下放,并通过潜水员将牵拉索固定于沉积层上,随后通过缆式起重装置将打捞装置从下沉室内竖直下沉至海底的沉积层上,同时四个卷索装置卷拢牵拉索,当打捞装置到达海底沉积层上时,液压定位桩运作,将打捞装置固定于沉积层上;
54.步骤二:通过左驱动座和右驱动座上的驱动件共同驱动螺旋轨转动,使得螺旋轨的前端钻入海底的沉积层中,在螺旋轨的前端钻入沉积层的过程中,钻头运作,保障螺旋轨在沉积层中流畅穿过;
55.步骤三:当螺旋轨的后端从左驱动座上的驱动件的左驱动座和右驱动座之间脱离时,左驱动座上的直线驱动装置驱动左驱动座上的驱动件直线移动指定距离,右驱动座上
的驱动件单独驱动螺旋轨继续转动钻入沉积层中;
56.步骤四:当螺旋轨的前端钻出沉积层并进入左驱动座上的驱动件的左驱动座和右驱动座之间时,左驱动座和右驱动座上的驱动件共同驱动螺旋轨转动钻出沉积层,在这一过程中,螺旋轨上的锁环与右驱动座上的钩环件的钩环抵住并使锁环上的锁舌转动,锁环上的开口打开使得钩环件和锁环连接,从而使得钩环件上连接的吊索随螺旋轨的转动收纳于螺旋轨的容纳槽内并随螺旋轨一同进入沉积层中;
57.步骤五:当螺旋轨的后端从右驱动座上的驱动件的左驱动座和右驱动座之间脱离时,右驱动座上的直线驱动装置驱动右驱动座上的驱动件直线移动指定距离,左驱动座上的驱动件单独驱动螺旋轨继续转动钻出沉积层;
58.步骤六:当螺旋轨的前端进入右驱动座上直线移动后的驱动件的左驱动座和右驱动座之间时,左驱动座和右驱动座上的驱动件共同驱动螺旋轨转动钻出沉积层,直至螺旋轨的前端再次钻入沉积层内一段距离,在这一过程中,螺旋轨上的锁环与左驱动座上的拨动件的拨动销抵住并使锁环上的锁舌转动,锁环上的开口打开使得钩环件和锁环解除连接,从而完成将吊索兜于沉没物下的操作。
59.步骤七:重复步骤二至步骤六,将剩余吊索全部兜于沉没物下;
60.步骤八:通过钢绞索千斤顶配合吊索将沉没物提起,直至沉没物进入下沉室内,同时解除牵拉索在沉积层上的固定,随后通过缆式起重装置将打捞装置从海底回收至下沉室内,并关闭隔水闸,然后对下沉室进行排水。
61.本说明书中所描述的以上内容仅仅是对本发明所作的举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明说明书的内容或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。