1.本发明涉及一种工业机器人,具体涉及一种带有操作机械手的工业机器人及其控制方法,属于工业机器人领域。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.现有搬运类型的工业机器人在进行物品夹取移动时,常利用机械手对物品进行夹取移动。现有的机械手功能较为单一,仅作为夹取移动时的器械进行使用。物品夹取移动时,容易发生磕碰损坏,导致物品移动中发生事故。由于机械手在夹取物品时,常采用多个接触点夹取的形式,若其中一个触点的挤压力没有达到,都会影响整个夹取过程的安全性。
技术实现要素:
4.针对现有技术中的问题,本发明提供了一种带有操作机械手的工业机器人及其控制方法。
5.本发明的目的可以通过以下技术方案实现:
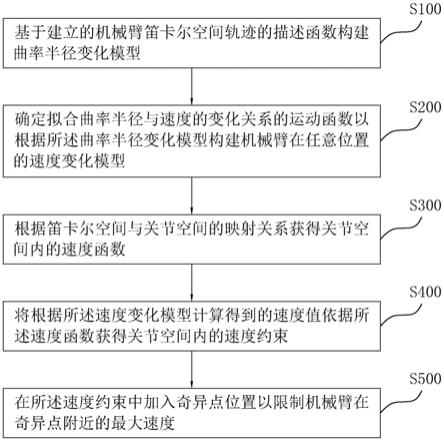
6.一种带有操作机械手的工业机器人的控制方法,该控制方法包含有以下步骤:
7.s1、采集待夹取物品的重量;
8.将待夹取物品的重量进行采集,并以此作为预设压力值的计算参考标准;
9.s2、预设机械手的压力值;
10.基于s1中采集的待夹取物品的重量,计算出机械手与待夹取物品接触点的压力值,并将计算出的压力值作为预设压力值;
11.s3、采集机械手实际压力值;
12.采集实际夹取过程中机械手与待夹取物品接触点的压力值作为实际压力值;
13.s4、压力值对比;
14.将机械手的预设压力值与实际压力值进行比对;
15.s5、机械手运行状态调整;
16.基于对比结果控制机械手的运行状态,对运行状态进行调整。
17.可选地,还包含有以下模块:
18.预录入模块,用于收集待夹取物品的重量,并利用数据传输模块将收集的数据传输到控制系统中;
19.压力值计算模块,基于待夹取物品的重量计算出机械手与待夹取物品接触点的压力值,将计算出的压力值作为预设压力值;
20.压力值采集模块,用于收集实际夹取过程中机械手与待夹取物品接触点的压力
值,并将其作为实际压力值;
21.压力值对比模块,用于将预设压力值与实际压力值按照预设比对规则进行比对,得出对比结果;
22.数据传输模块;用于将预设压力值、实际压力值、待夹取物品的重量传送到控制系统中,并将控制系统发出的控制信号传输到执行模块中;
23.执行模块,根据控制信号控制机械手的运行状态并对其进行调整,对待夹取物品进行操作。
24.可选地,预设比对规则包含以下步骤:
25.步骤一:将预设压力值设为p,实际压力值设为w,若w≥p,则机械手与待夹取物品对应接触点停止挤压,依次将多个接触点进行比对;
26.步骤二:多个接触点比对结束后,依据公式:
[0027][0028]
其中a为多个接触点实际压力值的平均值,若a≥p,则机械手夹取物品进行移动,若a《p,则机械手不移动物品;并重新依次对比p和w,若出现w《p,则对应的接触点再次挤压,直至w≥p以及a≥p。
[0029]
一种带有操作机械手的工业机器人,包含有控制方法,该工业机器人还包括机器人本体和其上方通过固定杆安装的机械手,所述机械手包含有顶板,顶板的边缘下方安装有多个可竖直移动的连接杆,连接杆的底部转动安装有夹板,夹板的内侧安装有多个可移动的定位板,定位板远离夹板的一侧安装有第一压力传感器;
[0030]
所述顶板的下方安装有用于物品包装的包装组件,且包装组件的下方安装有用于物品夹取中进行保护的防护组件。
[0031]
可选地,所述连接杆的顶部连接有侧边板,侧边板的底部与连接杆的顶部之间安装有第一伸缩柱,侧边板的顶部与顶板的圆周边缘连接。
[0032]
可选地,所述夹板的顶部通过转轴与连接杆的底部转动安装,且转轴的一端与驱动马达的输出轴连接,驱动马达安装在连接杆的底端内部,定位板与夹板之间安装有第三伸缩柱;所述夹板的底端连接有限位板,限位板呈“l”型设置,限位板竖直端的顶部与夹板的底部之间安装有第四伸缩柱,限位板的水平端上侧安装有第二压力传感器。
[0033]
可选地,所述包装组件包含有缠绕轴和驱动机构,缠绕轴转动安装在两个侧板之间,两个侧板对立侧的底部与缠绕轴的连接处转动安装有中空的端部座,缠绕轴的端部插接在端部座的内部,且端部座的外部一侧连接有紧固螺钉,紧固螺钉的一端延伸至端部座的内部与缠绕轴的外壁抵接。
[0034]
可选地,所述驱动机构包含有电磁外环和支撑筒,支撑筒套装在电磁外环的内部,支撑筒的外壁上方沿圆周方向安装有电磁内环,电磁内环外侧磁极和电磁外环的内侧磁极为同名磁极,且电磁外环为电磁铁;所述支撑筒为塑料材质,且支撑筒的外壁下方沿圆周方向设置有多个安装槽,安装槽的内部转动安装有驱动杆,驱动杆的一侧从安装槽的内部凸出至外部,安装槽的内部一端安装有驱动电机,驱动电机的输出轴与驱动杆的一端连接。
[0035]
可选地,所述电磁外环的底部内侧连接有筒状的推动板,推动板的内壁下方设置有多个风孔,推动板的顶部安装有控制驱动电机运行的启停开关,电磁外环的内侧底端设
置有腔体,腔体的内部转动安装有第二收纳杆,第二收纳杆的外部缠绕有第二拉绳,第二拉绳的一端与推动板的顶部连接;所述电磁外环的内壁下方设置有一圈装载腔,装载腔的内部安装有两个半环型的电热丝,两个电热丝呈对称设置,电热丝的一侧与装载腔的内壁之间安装有多个第二伸缩柱。
[0036]
可选地,所述防护组件包含有顶环和底环,电磁外环的下端外侧连接有顶环,顶环的底端设置有多个凹槽,凹槽的内部转动安装有第一收纳杆,第一收纳杆的外部缠绕有第一拉绳,顶环的底部连接有底环,第一拉绳的一端与底环的顶部连接,顶环和底环均套装在推动板的外部;
[0037]
顶环和底环之间安装有筒状的防护套,防护套的内壁连接有气囊,气囊的内壁设置有多个排气孔,排气孔的内部安装有单向阀,防护套的外壁和气囊外壁均贯穿设置有多个用于定位板移动的通孔。
[0038]
本发明的有益效果:
[0039]
1、根据实际物品的重量进行科学的计算压力值,既能保护物品不会被挤压损坏,又能使得物品在夹取移动过程中不会脱落。
[0040]
2、通过防护组件对待夹取移动的物品进行防护,既能保证物品的安全性能,同时能使得物品在夹取后能被清理,省去了后续的清理步骤,提升了工作效率。
[0041]
3、通过设置包装组件,使得物品在夹取移动后,外部可以包覆包装袋,利用包装袋对物品进行包装,进而使得物品在夹取清理后能被包覆,后续不会落入灰尘。
附图说明
[0042]
为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
[0043]
图1为本发明整体结构示意图。
[0044]
图2为本发明机械手结构示意图。
[0045]
图3为本发明气囊安装结构示意图。
[0046]
图4为本发明第一拉绳安装结构示意图。
[0047]
图5为本发明顶环与底环安装结构示意图。
[0048]
图6为本发明图5中a处细节放大结构示意图。
[0049]
图7为本发明支撑筒结构示意图。
[0050]
图8为本发明缠绕轴安装结构示意图。
[0051]
图9为本发明控制方法流程图。
[0052]
图10为本发明控制方法的系统图。
[0053]
图中:1、机器人本体;2、固定杆;3、机械手;4、顶板;5、缠绕轴;6、侧边板;7、第一伸缩柱;8、连接杆;9、夹板;10、限位板;11、第一压力传感器;12、定位板;13、底环;14、顶环;15、电磁外环;16、支撑筒;17、第一拉绳;18、防护套;19、通孔;20、推动板;21、第一收纳杆;22、侧板;23、凹槽;24、第二收纳杆;25、第二拉绳;26、启停开关;27、风孔;28、装载腔;29、第二伸缩柱;30、电热丝;31、驱动杆;32、安装槽;33、电磁内环;34、包装袋;35、端部座;36、气囊。
具体实施方式
[0054]
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0055]
请参阅图1-10所示,一种带有操作机械手的工业机器人的控制方法,该控制方法包含有以下步骤:
[0056]
s1、采集待夹取物品的重量;
[0057]
将待夹取物品的重量进行采集,并以此作为预设压力值的计算参考标准;在机械手使用之前,预先将待夹取物品的重量录入到控制系统中,从而方便计算出机械手的预设压力值。
[0058]
s2、预设机械手的压力值;
[0059]
基于s1中采集的待夹取物品的重量,计算出机械手与待夹取物品接触点的压力值,并将计算出的压力值作为预设压力值;根据实际待夹取物品的重量,来确定实际夹取过程中所需的挤压力,既能避免物品被挤压损坏的风险,又能保证物品在夹取过程中不易脱落。
[0060]
s3、采集机械手实际压力值;
[0061]
采集实际夹取过程中机械手与待夹取物品接触点的压力值作为实际压力值;机械手与物品接触过程中,利用压力传感器作为检测器械,用于检测实际夹取过程中机械手与待夹取物品接触点的压力值。
[0062]
s4、压力值对比;
[0063]
将机械手的预设压力值与实际压力值进行比对;实际压力值不小于预设压力值后,则认为机械手的某个触点达到了挤压要求,可以停止进行挤压。
[0064]
s5、机械手运行状态调整;
[0065]
基于对比结果控制机械手的运行状态,对运行状态进行调整。控制机械手是否带动待移动的物品进行移动。
[0066]
可选地,还包含有以下模块:
[0067]
预录入模块,用于收集待夹取物品的重量,并利用数据传输模块将收集的数据传输到控制系统中;
[0068]
压力值计算模块,基于待夹取物品的重量计算出机械手与待夹取物品接触点的压力值,将计算出的压力值作为预设压力值;
[0069]
压力值采集模块,用于收集实际夹取过程中机械手与待夹取物品接触点的压力值,并将其作为实际压力值;
[0070]
压力值对比模块,用于将预设压力值与实际压力值按照预设比对规则进行比对,得出对比结果;
[0071]
数据传输模块;用于将预设压力值、实际压力值、待夹取物品的重量传送到控制系统中,并将控制系统发出的控制信号传输到执行模块中;
[0072]
执行模块,根据控制信号控制机械手的运行状态并对其进行调整,对待夹取物品进行操作。
[0073]
可选地,预设比对规则包含以下步骤:
[0074]
步骤一:将预设压力值设为p,实际压力值设为w,若w≥p,则机械手与待夹取物品对应接触点停止挤压,依次将多个接触点进行比对;
[0075]
步骤二:多个接触点比对结束后,依据公式:
[0076][0077]
其中a为多个接触点实际压力值的平均值,若a≥p,则机械手夹取物品进行移动,若a《p,则机械手不移动物品;并重新依次对比p和w,若出现w《p,则对应的接触点再次挤压,直至w≥p以及a≥p。
[0078]
一种带有操作机械手的工业机器人,包含有控制方法,包括机器人本体1和其上方通过固定杆2安装的机械手3,机械手3包含有顶板4,顶板4的边缘下方安装有多个可竖直移动的连接杆8,连接杆8的底部转动安装有夹板9,夹板9的内侧安装有多个可移动的定位板12,定位板12远离夹板9的一侧安装有第一压力传感器11。
[0079]
顶板4的下方安装有用于物品包装的包装组件,且包装组件的下方安装有用于物品夹取中进行保护的防护组件。
[0080]
作为本发明的一种技术优化方案,连接杆8的顶部连接有侧边板6,侧边板6的底部与连接杆8的顶部之间安装有第一伸缩柱7,侧边板6的顶部与顶板4的圆周边缘连接。侧边板6便于连接杆8的安装。
[0081]
作为本发明的一种技术优化方案,夹板9的顶部通过转轴与连接杆8的底部转动安装,且转轴的一端与驱动马达的输出轴连接,驱动马达安装在连接杆8的底端内部,定位板12与夹板9之间安装有第三伸缩柱。
[0082]
作为本发明的一种技术优化方案,夹板9的底端连接有限位板10,限位板10呈“l”型设置,限位板10竖直端的顶部与夹板9的底部之间安装有第四伸缩柱,限位板10的水平端上侧安装有第二压力传感器。利用限位板10可以适应不同尺寸的物品,提高了使用的范围。
[0083]
作为本发明的一种技术优化方案,包装组件包含有缠绕轴5和驱动机构,缠绕轴5转动安装在两个侧板22之间,两个侧板22对立侧的底部与缠绕轴5的连接处转动安装有中空的端部座35,缠绕轴5的端部插接在端部座35的内部,且端部座35的外部一侧连接有紧固螺钉,紧固螺钉的一端延伸至端部座35的内部与缠绕轴5的外壁抵接。缠绕轴5可以在两个侧板22之间自由的拆卸安装,外部缠绕的包装袋34使用完毕后,可以将缠绕轴5拆卸进行更换。
[0084]
作为本发明的一种技术优化方案,驱动机构包含有电磁外环15和支撑筒16,支撑筒16套装在电磁外环15的内部,支撑筒16的外壁上方沿圆周方向安装有电磁内环33,电磁内环33外侧磁极和电磁外环15的内侧磁极为同名磁极,且电磁外环15为电磁铁。支撑筒16能将包装袋34进行撑开,方便后续的使用。电磁外环15能通过磁性将电磁内环33稳定在内部不易晃动,使得电磁内环33能保持稳定的工作状态,且不影响包装袋34的移动。
[0085]
作为本发明的一种技术优化方案,支撑筒16为塑料材质,且支撑筒16的外壁下方沿圆周方向设置有多个安装槽32,安装槽32的内部转动安装有驱动杆31,驱动杆31的一侧从安装槽32的内部凸出至外部,安装槽32的内部一端安装有驱动电机,驱动电机的输出轴与驱动杆31的一端连接。驱动杆31能向下对包装袋34进行推动,使得热切割后的包装袋34
能在驱动杆31的驱动下进入到推动板20的内部。
[0086]
作为本发明的一种技术优化方案,电磁外环15的底部内侧连接有筒状的推动板20,推动板20的内壁下方设置有多个风孔27,推动板20的顶部安装有控制驱动电机运行的启停开关26,电磁外环15的内侧底端设置有腔体,腔体的内部转动安装有第二收纳杆24,第二收纳杆24的外部缠绕有第二拉绳25,第二拉绳25的一端与推动板20的顶部连接。第二收纳杆24的转动能对第二拉绳25进行缩放,进而能带动推动板20进行上下移动,对包装袋34进行拉动。
[0087]
作为本发明的一种技术优化方案,电磁外环15的内壁下方设置有一圈装载腔28,装载腔28的内部安装有两个半环型的电热丝30,两个电热丝30呈对称设置,电热丝30的一侧与装载腔28的内壁之间安装有多个第二伸缩柱29。电热丝30能对包装袋34的上端进行热切割,使得包装袋34可以按需使用,保证了包装袋34使用的连贯性。
[0088]
作为本发明的一种技术优化方案,防护组件包含有顶环14和底环13,电磁外环15的下端外侧连接有顶环14,顶环14的底端设置有多个凹槽23,凹槽23的内部转动安装有第一收纳杆21,第一收纳杆21的外部缠绕有第一拉绳17,顶环14的底部连接有底环13,第一拉绳17的一端与底环13的顶部连接,顶环14和底环13均套装在推动板20的外部。
[0089]
顶环14和底环13之间安装有筒状的防护套18,防护套18的内壁连接有气囊36,气囊36的内壁设置有多个排气孔,排气孔的内部安装有单向阀,防护套18的外壁和气囊36外壁均贯穿设置有多个用于定位板12移动的通孔19,利用防护组件对待夹取移动的物品进行防护,既能保证物品的安全性能,同时能使得物品在夹取后能被清理,省去了后续的清理步骤,提升了工作效率。
[0090]
本发明在使用时,首先将待夹取物品的重量进行录入控制系统中,并计算出机械手的预设压力值,控制系统为现有技术的使用,在此不做过多叙述。将机器人本体1与外部的电源连接以及控制器系统进行电性连接。将待使用的包装袋34缠绕在缠绕轴5的外部,并将缠绕轴5安装在两个侧板22之间。并将包装袋34的一端向下拉动进入到电磁外环15的内部,包装袋34的一端将支撑筒16套装在内部,并延伸至电磁外环15的内部下方,支撑筒16将包装袋34进行支撑,使得包装袋34向下移动时能保持端部张开的状态,能将待包装的物品从上向下进行全方位的包装。
[0091]
物品需要夹取移动时,将机械手3移动到待夹取物品的上方,随后根据待夹取物品的尺寸调节连接杆8的高度,进而使得下方的夹板9能适应不同尺寸的物品,能从合适位置对物品进行夹持固定。随后第一收纳杆21发生转动,第一拉绳17伸长,底环13在重力的作用下向下移动,并将防护套18进行展开套装在待夹取物品的外部。利用顶环14内部的气泵将气囊36内部充入气体,气囊36膨胀,体积变大,在待夹取物品的外部进行包裹,使得待夹取物品不易发生晃动,且夹取移动过程中受到外界碰撞后不易损坏,夹取过程中不易被连接杆8和夹板9磕碰损坏。
[0092]
物品夹取时,定位板12移动到通孔19的位置处,随后第三伸缩柱伸长,推动定位板12从通孔19中穿过并与待夹取物品的外壁抵接。直至第一压力传感器11检测到的实际压力值大于预设压力值,第三伸缩柱停止运行。使得定位板12对物品夹取时能保证稳定的夹取力,后续夹取移动时不易脱落,且不会因夹取力过大对物品造成挤压损坏。
[0093]
物品夹取移动到预设的位置后,第三伸缩柱收缩,从通孔19中移出。随后第一收纳
杆21转动对第一拉绳17进行缠绕收纳,使得底环13向上移动回到顶环14的下方。底环13向上移动过程中,气囊36内壁排气孔中的单向阀开启,气囊36内部的气体从排气孔向外排出对物品的外部进行吹动,进而将物品外部的灰尘进行吹动清理,使得物品在夹取移动后得到清理。清理结束后,第二收纳杆24转动,第二拉绳25延伸,推动板20在重力作用下向下移动,推动板20内壁的多个风孔27能对包装袋34的下端外壁进行吸附粘接,因此推动板20能带动包装袋34一起向下移动,包装袋34套装在清理后的物品外部。推动板20移动到最下方后,第二伸缩柱29伸长,推动电热丝30从装载腔28的内部向外移动,两个电热丝30能从外部将包装袋34挤压在支撑筒16的外部下方,电热丝30能将包装袋34进行热切割。包装袋34切割后,风孔27从包装袋34的外部脱离,随后第二收纳杆24转动对第二拉绳25进行缠绕收纳,从而拉动推动板20向上移动,直至推动板20移动到电磁外环15的下方。启停开关26与电磁外环15的底端抵接受到按压,使得驱动杆31转动,驱动杆31带动包装袋34向下移动,进而使得包装袋34不断的从缠绕轴5的外部向外拉动,包装袋34可以连续使用。包装袋34向下移动至推动板20的内壁下方,风孔27对包装袋34的下端外壁进行吸附,便于后续包装袋34的使用。物品夹取移动完毕后,机械手3移动到初始位置等待下一次的物品夹取移动。
[0094]
若待夹取移动的物品上方尺寸较大,可以利用转轴带动夹板9进行转动,直至夹板9转动至水平状态,随后连接杆8带动夹板9移动至物品的上方并与物品抵接。第四伸缩柱收缩,带动限位板10向物品的顶部边缘移动,限位板10侧壁的第二压力传感器检测的实际压力值大于预设压力值后,第四伸缩柱停止运行,物品不易被限位板10夹取损坏。若物品外部需要包装,可更换上方所需使用的包装袋34,更换成可以缠绕在物品外部的包装袋34,向下拉动进行缠绕覆盖,适应不同的工作需求。
[0095]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。