1.本发明涉及驱动设备,具体涉及一种驱动器、机器人及驱动器驱动方法。
背景技术:
2.随着科技的进步,人工智能、物联网等技术的不断发展,各种机器人已经应用到了我们生活的方方面面,代替人类做枯燥、单调、劳动强度大的重复性工作或恶劣、极端工况下的危险性工作。工业领域中产品的个性化生产和小型化制造如小微型件的加工、搬运、装配、焊接、喷漆等工艺环节和民生领域中食品、药品的分拣、包装、码垛等工序环节不适合人工或中、大型机器人高效的工作,机器人的小型化和微型化成了人们研究的热点问题。
3.传统电磁电机作为驱动器驱动机器人关节运动,因受工作机理的制约,驱动器不可能做的很小,对应的机器人结构也很难小型或微型化,而且成本高,可靠性低,难以满足工业领域对小型或微型产品生产的需要。为此如何设计一款结构紧凑、体积小、功率-重量比和力矩-惯量比大、响应速度快、控制精度高、定位准的关节驱动器,简化机器人驱动方式、减小机器人的体积和重量、缩小机器人占用空间,降低研发和制造成本,满足工业或民生领域对机器人小型化或微型化的生产需求,是摆在机器人生产企业面前亟待解决的重要课题。
技术实现要素:
4.本发明实施例提供了一种驱动器、机器人及驱动器驱动方法,以至少解决相关技术中驱动器难以小型化或微型化的问题。
5.根据本发明的一个实施例,提供了一种驱动器,所述驱动器包括驱动器本体,所述驱动器本体包括:底座组件;定子组件,设于所述底座组件,包括环形定子及多个驱动装置,多个所述驱动装置用于在电压信号激励下产生形变位移并传递给环形定子,使所述环形定子产生绕其中心轴线的行波运动;转子组件,可转动地设于所述底座组件,与所述定子组件接触,并在所述环形定子的摩擦力驱动下转动;及输出组件,连接于所述转子组件,在所述转子组件带动下转动以输出力矩。
6.进一步地,所述驱动装置包括:压电叠堆,在周期性正弦波和余弦波电压信号激励下,产生形变位移;弹性铰链,包括两个连接节,每个所述连接节一端分别与所述压电叠堆的相应一端铰接,每个所述连接节另一端共同连接连接件;及连接件,分别连接所述弹性铰链及所述环形定子以将作用力传递给所述环形定子。
7.进一步地,所述连接件包括:
第一连接块,包括相连接的第一连接部与第二连接部,所述第一连接部与所述两个连接节连接,所述第二连接部通过弹性件弹性连接于底座组件;及第二连接块,一端通过弹性件弹性连接所述第二连接部,其另一端通过弹性件弹性连接所述环形定子。
8.进一步地,所述压电叠堆的数量为四个,每两个所述压电叠堆沿所述环形定子对称设置形成一组,两组压电叠堆分别用于被施加相位差为180
°
的正弦波和余弦波电压信号,压电叠堆在周期性电压信号激励下两两之间产生有规律的相位差90
°
的伸缩形变。
9.进一步地,所述转子组件包括:盘形转子,可转动地设于所述底座组件,与所述定子组件接触,并在所述环形定子的摩擦力驱动下转动;碟簧压板,设于所述盘形转子背离所述底座组件的一侧,并与所述底座组件相固定;及碟形弹簧,弹性抵持所述碟簧压板及所述盘形转子,以将所述盘形转子抵压于所述环形定子。
10.进一步地,所述输出组件包括:输出轴,一端通过固定件压紧在碟簧压板背离所述转子组件的一侧,所述输出轴与盘形转子通过花键轴及花键槽配合进行连接;及弹性挡圈,装设于所述输出轴并压紧在所述底座组件背离所述碟簧压板的一侧,所述弹性挡圈与所述固定件配合以调节所述环形定子和所述盘形转子之间的预紧力。
11.进一步地,所述底座组件包括:底座本体,用于与定子组件及驱动器的壳体固定;及轴承,所述输出轴穿设于所述轴承,所述轴承对所述输出轴进行径向定位。
12.进一步地,所述盘形转子上下端面和圆柱面均开有凹槽,以降低盘形转子与环形定子接触面的接触刚度,增加盘形转子工作时的形变量,增强环形定子传递与转子组件的输出力矩。
13.本发明实施例还提供一种机器人,包括:机器人本体;及驱动器,所述驱动器设于所述机器人本体,用于驱动所述机器人本体。
14.本发明实施例还提供一种驱动器驱动方法,包括:向两组压电叠堆分别施加相位差为180
°
的正弦波和余弦波电压信号,压电叠堆在周期性电压信号激励下两两之间产生有规律的相位差90
°
的伸缩形变;通过弹性铰链将压电叠堆的形变放大,并驱动环形定子端面各质点上下振动产生环形行波运动;环形定子通过摩擦力带动转子组件转动;转子组件带动输出组件转动进行驱动。
15.有益效果:本发明的驱动器通过压电体的逆压电效应进行机电能量转化,不含磁极和绕组,自身不产生磁场,也不会被外界磁场所干扰,使用该驱动器的小微型机器人可应用于工业或民生领域,也可推广应用于深空探测、深海探测或强磁干扰环境等极端场合。
16.该驱动器结构紧凑、可小型或微型化,能直接驱动负载,单位功率质量小,响应速
度快、低速性能好、控制精度高、定位精确性高。
附图说明
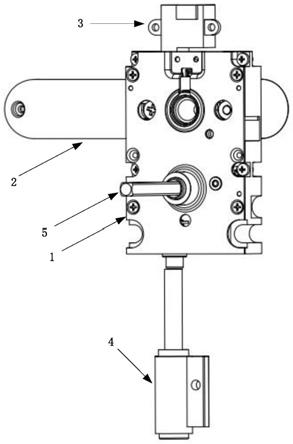
17.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1是本发明实施例的驱动器的总装配图。
18.图2是图1所示驱动器壳体的立体示意图。
19.图3是图1所示驱动器本体的立体示意图。
20.图4是图1所示驱动器的底座组件的立体示意图。
21.图5是图4所示底座组件的底座本体立体示意图。
22.图6是图4所示底座组件的轴承压板的立体示意图。
23.图7是图1所示驱动器的定子组件的立体示意图。
24.图8是图7所示定子组件的驱动装置的主视图。
25.图9是图7所示定子组件的环形定子的立体示意图。
26.图10是图9所示环形定子的防滑垫圈的立体示意图。
27.图11是图9所示环形定子的定子环的立体示意图。
28.图12是图1所示驱动器的转子组件的立体示意图。
29.图13是图12所示转子组件的盘形转子的立体示意图。
30.图14是图12所示转子组件的防滑垫片的立体示意图。
31.图15是图12所示转子组件的碟簧压板的立体示意图。
32.图16是图1所示驱动器的输出组件的立体示意图。
33.图17是图16所示输出组件的输出轴的立体示意图。
34.图中数字代表元件:1、驱动器壳体;2、驱动器本体;21、底座组件;211、底座;212、轴承压板;213、轴承;214、内六角螺钉;22、定子组件;221、驱动装置;2211、压电叠堆;2212、弹性铰链;222、环形定子;2221、防滑垫圈;2222、定子环;223、内六角螺钉;23、转子组件;231、盘形转子;232、防滑垫片;233、碟形弹簧;234、碟簧压板;24、输出组件;241、输出轴;2411、花键轴;2412、弹性挡圈槽;242、六角螺母;243、弹性挡圈;25、内六角螺钉。
具体实施方式
35.下文中将参考附图并结合实施例来详细说明本发明。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
36.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
37.本发明专利提出一种机器人。机器人包括驱动器以驱动其关节。该驱动器包括驱动器壳体1和驱动器本体2两部分。驱动器总体结构如图1所示。其中驱动器壳体1为端部具有凸台内螺纹的杯型圆柱体结构,圆柱面在开口端附近开有圆柱孔,便于与驱动器本体2固定装配和电源控制线的引出。结构如图2所示。驱动器本体2包括驱动器底座组件21、定子组件22、转子组件23和输出组件24,其中定子组件22中的驱动装置221绕驱动器中心轴线设置均布在底座组件21上。驱动器本体结构如图3所示。
38.驱动器本体2中的定子组件22(如图3所示)借助内六角螺钉25固定在驱动器底座组件21中底座211的台座上,转子组件23通过输出组件24压紧在定子组件22上,定子组件22和转子组件23相接触的部位设置防滑垫圈2221,减少转子组件23相对定子组件22的滑动,提高传动效率,实现定子驱动系统的形变能向输出组件旋转动能的转换。
39.驱动器底座组件21(如图4所示)为t形圆柱体结构,包括底座211、轴承213和轴承挡板212。底座211下部为具有凸台的圆柱体台座,凸台的上部设有螺纹结构便于与驱动器壳体1进行固定装配,凸台下部绕中心轴线设置均布的带有圆柱孔的固定耳板,便于通过螺钉将驱动器固定在小微型机器人的关节处。台座中心轴线上底面设有筒形杆件,杆件上部和台座中心轴线下底面均设有轴承孔,用于放置固定输出组件24的轴承213。台座底面绕中心轴线不同半径圆周上设置均布的两两互成90
°
的沉头螺钉孔,通过内六角螺钉25和214固定定子组件22和轴承压板212。结构如图5所示。轴承压板212为圆柱筒凸台结构,凸台下底面绕中心轴线设有均布的两两互成90
°
的沉头螺钉孔,通过内六角螺钉214固定在底座211上,凸台上端面用于固定放置于台座底面轴承孔内的轴承213,防止驱动器工作时输出组件24中的输出轴241带动轴承213轴向串动。结构如图6所示。
40.定子组件22(如图7所示)为近似的四腿圆凳结构,包括驱动装置221和环形定子222。驱动装置221上部通过内六角螺钉223固定在环形定子222的下端底面上,驱动装置221下部通过内六角螺钉25固定在底座211的底面台座上。驱动装置221包括提供动力的压电叠堆2211和弹性铰链2212。其中弹性铰链2212为基于三角形和杠杆原理的使形变位移具有两级放大功能,将压电叠堆2211的微形变通过弹性铰链2212进行放大,驱动与之固联的环形定子222端面各质点上下振动产生环形行波运动,结构如图8所示。环形定子222包括防滑垫圈2221和定子环2222,粘合于定子环2222上端面的防滑垫圈2221为橡胶或尼龙等软材质的环状结构,上端面沿半径方向开有放射状方形锯齿槽,降低定子组件22与转子组件23之间的相对滑动,绕中心轴线设有均布的螺钉孔,便于螺钉223的装配。结构如图9、10所示。定子环2222设置为圆柱筒形结构,端面绕中心轴线设有均布的沉头螺钉孔,通过螺钉223与驱动装置221固联在一起组成定子组件22,将压电叠堆2211产生的形变能转化为环形定子222端面各质点的上下振动形成环形行波。结构如图11所示。
41.弹性铰链2212,包括两个连接节连接件。每个所述连接节一端分别与所述压电叠堆2211的相应一端铰接,每个所述连接节另一端共同连接连接件。
42.连接件分别连接所述弹性铰链2212及所述环形定子222以将作用力传递给所述环形定子222。所述连接件包括第一连接块及第二连接块。第一连接块包括相连接的第一连接部与第二连接部,所述第一连接部与所述两个连接节连接,所述第二连接部通过弹性件弹性连接于底座组件。第二连接块一端通过弹性件弹性连接所述第二连接部,其另一端通过弹性件弹性连接所述环形定子222。
43.转子组件23(如图12所示)包括盘形转子231、防滑垫片232、碟形弹簧233和蝶簧压板234。盘形转子231为圆柱体结构(如图13所示),中心设置花键槽,与输出组件24中的输出轴241花键轴配合;上下底面和圆柱面均开有凹槽,降低盘形转子231与环形定子222接触面的接触刚度,增加盘形转子231工作时的形变量,增强定子组件22产生的环形行波运动传递到转子组件23旋转运动的传动力矩。防滑垫片232设置为橡胶或尼龙等软材质的圆环形结构(如图14所示),粘贴在盘形转子231的上底面凹槽内,降低与之接触的碟形弹簧233与盘
形转子231之间的相对滑动。转子组件23上部设有的圆筒状的碟簧压板234(如图15所示)、碟形弹簧233通过输出组件24用于调节定子组件22和转子组件23之间的预紧力,保证定子组件22和转子组件23之间动力的有效传递。
44.输出组件24(如图16所示)包括输出轴241、螺母242和弹性挡圈243。输出转子组件23的动力驱动机器人关节运动。输出轴241顶部设有螺纹用六角螺母242固定并压紧在碟簧压板234上,上方设置花键轴2411与盘形转子231的花键槽配合,中部设有轴肩,用于与底座组件21中的轴承213配合,径向固定输出轴241,下方开有弹性挡圈槽2412,用于卡紧弹性挡圈243。弹性挡圈243与螺母242配合有效调节环形定子222和盘形转子231之间的预紧力。使输出轴有效输出动力进而实现与之固联的小微型机器人关节的驱动。结构如图17所示。
45.可以理解,在其他实施例中,螺母242可以为其他固定件。
46.本发明还提出一种驱动器驱动方法,包括:向两组压电叠堆分别施加相位差为180
°
的正弦波和余弦波电压信号,压电叠堆在周期性电压信号激励下两两之间产生有规律的相位差90
°
的伸缩形变;通过弹性铰链将压电叠堆的形变放大,并驱动环形定子端面各质点上下振动产生环形行波运动;环形定子通过摩擦力带动转子组件转动;转子组件带动输出组件转动进行驱动。
47.可以理解,在其他实施例中,可以改变压电驱动方式如将压电叠堆改用柱形压电促动器、机构放大式促动器或形状记忆合金等可产生(微)形变的压电驱动源、改进与压电叠堆固联的弹性铰链实现一到多级位移放大等结构、压电叠堆与弹性铰链组成的驱动装置绕中心轴线的均布方式、定子组件与底座组件的装配方式、转子组件中碟形弹簧改用柱体刚簧等其他弹性体、盘形转子和环形定子结构及两者之间摩擦驱动为滚动驱动、输出轴与转子的装配方式、输出轴在底座组件中的定位方式及伸出方位、底座组件结构、驱动器壳体与底座及底座与被驱动体的固定方式等),所发明的基于压电体逆压电效应的驱动器作为小微型机器人关节驱动外还可作为精密定位平台等其他小微型机械的动力源使用。
48.本发明技术方案带来的有益效果1、动作灵活、控制准确。随着机器人应用领域越来越广,基于工作对象的特殊性,个性化和小微型化机器人需求越来越多,对机器人的动作灵活性、定位精确性和响应快速性要求也越来越高,电磁电机驱动的机器人因传动链多,转动惯量大,正常驱动下结构难以小型或微型化,启动、调速和制动灵活较差,而且多电机驱动结构和系统控制复杂,难以实现机器人的灵活性、准确性和快速性控制。本发明提出的基于压电体逆压电效应的驱动器,采用直接驱动方式,没有中间机械传递环节,大大减小了传动系统带来的系列误差。响应在毫秒级或微秒级内完成,能实现纳米级定位精度,断电时定、转子间摩檫力使驱动器具有较大阻力矩,不需要专门制动装置即可实现自锁,控制方便,多电机驱动易于控制,机器人多自由度关节易于实现,提高了机器人动作的灵活性和控制的准确性。
49.2、驱动能耗低,抗磁干扰强。本发明提出的小微型机器人关节驱动器是在周期性正弦波和余弦波电压信号激励下,压电叠堆产生微形变位移经由弹性铰链放大传与定子,驱使定子端面各质点上下振动产生沿中心轴线的行波运动,然后依靠摩擦带动与定子配合的转子旋转,进而驱动与转子配合的输出轴输出动力。该驱动方式传动链短,结构紧凑,驱
动器和机器人均易于小型或微型化,自重小,单位外负载驱动能耗低。该结构不含磁极和绕组,工作时不产生磁场也不会被外界磁场所干扰,抗电磁干扰强,适用范围广。特别在电磁敏感、小微型工作对象环境中该驱动方式的机器人有更大的应用空间。
50.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。