1.本实用新型涉及机房技术领域,尤其涉及—种机房智能轮式巡检机器人。
背景技术:
2.机房指电脑学习室;在it业,机房普遍指的是电信、网通、移动、双线、电力以及政府或者企业等,存放服务器的,为用户以及员工提供it服务的地方,由于机房的物品珍贵,防止被人偷窃,需要巡检机器人进行巡检。
3.传统的巡检机器人自身具备消音、摄像头智能转动等其他功能,但是不完善,例如,传统的巡检机器人发生故障,一般问题出现在摄像头上,传统的摄像头安装采用螺丝与螺母进行固定,不易拆卸,且不具备对摄像头的高度进行调解,机器人在行走过程中与其他物体相撞,容易被撞到的现象,为此,我们设计了—种机房智能轮式巡检机器人。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种机房智能轮式巡检机器人,通过对两个拉绳进行相背拉动即完成对摄像头进行拆卸,其拆卸简单,同时通过拉动第二t形块即可以对支撑柱的高度进行调节;当该装置在移动过程中,通过设有防倒机构尽量降低其倾倒的现象。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.—种机房智能轮式巡检机器人,包括通过对两个拉绳进行相背拉动即完成对摄像头进行拆卸,其拆卸简单,同时通过拉动第二t形块即可以对支撑柱的高度进行调节;当该装置在移动过程中,通过设有防倒机构尽量降低其倾倒。
7.优选地,包括摄像头和底座,所述摄像头的下端转动连接有连接板,所述底座的上端固定连接有空心筒,所述空心筒贯穿并滑动连接有支撑柱,所述空心筒与支撑柱之间设有限位机构,所述支撑柱的上端固定连接有安装板,所述连接板与安装板之间设有两个安装机构,所述空心筒贯穿并固定连接有圆板,所述圆板的外壁固定连接有环形气囊,所述底座的下端固定连接有两个固定块,两个所述固定块共同固定连接有空心板,所述空心板与环形气囊之间贯穿并固定连接有连接管,所述连接管与底座的侧壁固定连接,所述底座的下端固定连接有四个万向轮,所述空心板与四个万向轮之间设有防倒机构。
8.优选地,所述安装机构包括贯穿设置在安装板上的空槽,所述连接板的下端固定连接第一t形块,所述第一t形块贯穿空槽并与其内壁滑动连接。
9.优选地,所述安装板上设有内槽,所述内槽的内壁滑动连接有限位块,所述限位块与内槽的内壁之间固定连接有第一弹簧,所述第一 t形块上贯穿设有限位槽,所述限位块贯穿限位槽并与其内壁滑动连接。
10.优选地,所述安装板的一端贯穿设有拉绳槽,所述拉绳槽的内壁贯穿并滑动连接有拉绳,所述拉绳的一端与限位块固定连接,两个所述拉绳的另一端共同固定连接有第二弹簧。
11.优选地,所述限位机构包括贯穿设置在支撑柱侧壁上的多个插槽,所述空心筒的侧壁贯穿设有矩形槽,多个所述插槽均与矩形槽在同一平面。
12.优选地,所述矩形槽的内壁贯穿并滑动连接有第二t形块,所述第二t形块上套设第三弹簧,所述第三弹簧与矩形槽的内壁固定连接。
13.优选地,所述第二t形块与第三弹簧共同固定连接有插块,所述插块与插槽相匹配,所述插块贯穿插槽并与其内壁滑动连接。
14.优选地,所述防倒机构包括贯穿空心板并与其内壁滑动连接的压板,所述压板与空心板的内壁之间固定连接有多个第四弹簧。
15.优选地,所述压板与空心板的内壁之间密封连接。
16.优选地,所述压板的下端设为摩擦面。
17.本实用新型与现有技术相比,其有益效果为:
18.1、需要将摄像头进行拆卸时,通过第二弹簧拉动两个拉绳,使两个限位块远离两个第一t形块,即可以将摄像头进行拆除,当需要将摄像头进行安装时,向下压动连接板,将两个限位块卡进限位槽上,即完成对摄像头的安装。
19.2、当需要调节支撑柱的高度时,通过第二t形块拉动插块,即对支撑柱进行移动高度,当支撑柱移动到合适高度时,将插块再次卡进插槽中,即完成对支撑柱的高度调节。
20.3、控制该装置在行走过程中,当撞到机房的散零件,物体与环形气囊进行相撞,环形气囊被压缩,通过连接管将气体排入到空心板中,并推动压板与地面相接触,使其不易倾倒。
21.综上所述,通过对两个拉绳进行相背拉动即完成对摄像头进行拆卸,其拆卸简单,同时通过拉动第二t形块即可以对支撑柱的高度进行调节;当该装置在移动过程中,通过设有防倒机构尽量降低其倾倒的现象。
附图说明
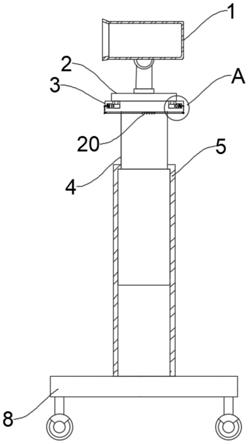
22.图1为实施例1提出的—种机房智能轮式巡检机器人的结构示意图;
23.图2为图1中a处结构放大图;
24.图3为实施例2提出的—种机房智能轮式巡检机器人的结构示意图;
25.图4为实施例3提出的—种机房智能轮式巡检机器人的结构示意图;
26.图5为图4中b处结构放大图。
27.图中:1摄像头、2连接板、3安装板、4支撑柱、5空心筒、6 圆板、7环形气囊、8底座、9第四弹簧、10压板、11连接管、12第一t形块、13限位块、14第一弹簧、15拉绳、16第二t形块、17 第三弹簧、18插块、19插槽、20第二弹簧、21空心板。
具体实施方式
28.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
29.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关
系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.实施例1
31.参照图1-2,—种机房智能轮式巡检机器人,包括摄像头1和底座8,摄像头1的下端转动连接有连接板2,支撑柱4的上端固定连接有安装板3,连接板2与安装板3之间设有两个安装机构,安装机构包括贯穿设置在安装板3上的空槽,连接板2的下端固定连接第一 t形块12,第一t形块12贯穿空槽并与其内壁滑动连接,空槽对第一t形块12进行限位。
32.安装板3上设有内槽,内槽的内壁滑动连接有限位块13,内槽的内壁固定连接有阻挡块,阻挡块对限位块13进行限位,限位块13 与内槽的内壁之间固定连接有第一弹簧14,第一t形块12上贯穿设有限位槽,限位块13贯穿限位槽并与其内壁滑动连接,安装板3的一端贯穿设有拉绳槽,拉绳槽的内壁贯穿并滑动连接有拉绳15,拉绳15的一端与限位块13固定连接,两个限位块13相对的一面设为楔形面,两个拉绳15的另一端共同固定连接有第二弹簧20,安装板 3的下端安装有两个导向轮,两个导向轮对两个拉绳15进行导向。
33.进一步解释,当工作人员需要将摄像头1进行拆卸时,通过第二弹簧20拉动两个拉绳15,两个拉绳15相对运动带动两个限位块13 相对移动,两个限位块13远离两个第一t形块12,即可以将摄像头 1进行拆除。
34.当需要将摄像头1进行安装时,将两个第一t形块12对准两个空槽,向下压动连接板2,在两斜面的限位下,两个限位块13相背移动之后,并卡在限位槽上,即完成对摄像头1的安装。
35.实施例2
36.参照图1-3,本实施例与实施例1、2不同的是,本实施例中空心筒5贯穿并固定连接有圆板6,圆板6的外壁固定连接有环形气囊 7,底座8的下端固定连接有两个固定块,两个固定块共同固定连接有空心板21,空心板21与环形气囊7之间贯穿并固定连接有连接管 11,连接管11与底座8的侧壁固定连接,底座8的下端固定连接有四个万向轮,空心板21与四个万向轮之间设有防倒机构,防倒机构包括贯穿空心板21并与其内壁滑动连接的压板10,压板10采用实心板,重量大,压板10与空心板21的内壁之间固定连接有多个第四弹簧9,压板10与空心板21的内壁之间密封连接,压板10的下端设为摩擦面,增大压板10与地面之间的摩擦力。
37.进一步解释,当控制该装置在行走过程中,当无意撞到机房的散零件,如机柜等其他硬件,首先物体与环形气囊7进行相撞,环形气囊7被压缩,通过连接管11将气体排入到空心板21中,并推动压板 10向下移动,压板10与地面相接触,增大与地面的接触并始终不改变该装置的重心,使其不易倾倒。
38.实施例3
39.参照图1-5,本实施例与实施例1不同的是,本实施例中底座8 的上端固定连接有空心筒5,空心筒5贯穿并滑动连接有支撑柱4,空心筒5与支撑柱4之间设有限位机构,限位机构包括贯穿设置在支撑柱4侧壁上的多个插槽19,空心筒5的侧壁贯穿设有矩形槽,多个插槽19均与矩形槽在同一平面,矩形槽的内壁贯穿并滑动连接有第二t形块16,第二t形块
16上套设第三弹簧17,第三弹簧17与矩形槽的内壁固定连接,第二t形块16与第三弹簧17共同固定连接有插块18,插块18与插槽19相匹配,插块18贯穿插槽19并与其内壁滑动连接,插块18对插槽19进行限位。
40.进行一步解释,当工作人员需要调节支撑柱4的高度时,通过第二t形块16拉动插块18,插块18脱离插槽19并滑进矩形槽中,即可以对支撑柱4进行移动高度,当支撑柱4移动到合适高度时,将插块18再次卡进插槽19中,即完成对支撑柱4的高度调节。
41.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。