1.本发明涉及信息自动化技术领域,具体为一种无人装车系统。
背景技术:
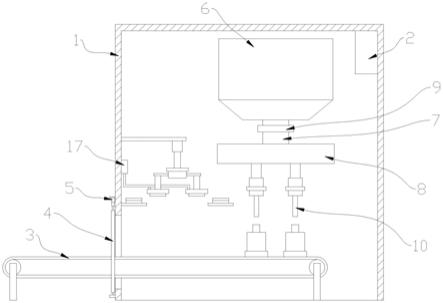
2.当前化工厂的液体装车操作80%还是以现场人员手动操控为主,手动操控具体流程为,车辆停到位,操作人员系上安全带,放下平台步梯,然后搬动鹤管通过步梯攀爬到槽车顶部,把鹤管放到车辆顶部管口,然后拧紧锁紧机构,通过步梯再回到平台上,打开阀门进行装液体,到量后停止装车,人工打开排气阀,排出剩余液体,人工放下步梯攀爬到车辆顶部,松开锁紧机构,拉出充装鹤管通过步梯拉回归位,正常10个灌装口需要3-5人操作工。
3.基于对上述资料的检索,可以看出该操作存在如下缺点:危化品本身对人体有害,需要每次登高,不安全,且劳动强度高,效率低。
4.目前技术中对上述问题的改进就是把鹤管改为气动运动控制,不用人攀爬车顶,该种方式仅仅解决不用人攀爬车顶放管,为此,特提出一种无人装车系统,通过雷达扫描目标自动图形识别、通过pc自动计算运行轨迹,发命令给plc控制机械臂三轴角度运动,精准定位到目标位置,实现控制装车,完全解放人力,实现现场无人装车,真正实现机械化减人、自动化换人,降低高危岗位现场作业人员数量。
技术实现要素:
5.(一)解决的技术问题针对现有技术的不足,本发明提供了一种无人装车系统,解决了上述的问题。
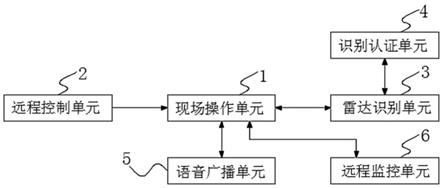
6.(二)技术方案为实现上述目的,本发明提供了如下技术方案:一种无人装车系统,包括现场操作单元和远程控制单元,所述现场操作单元用于现场操作,通过气动马达控制机械臂操控鹤管进行x、y和z方向的移动,用于对准车辆管口,所述远程控制单元与现场操作单元对接,且远程控制单元用于远程操控气动马达运行,所述现场操作单元与雷达识别单元对接,其中雷达识别单元用于识别车辆管口位置,并获取车辆管口的三维坐标值,计算出鹤管移动轨迹,并将车辆管口的三维坐标值和移动轨迹数据同步到现场操作单元中,所述雷达识别单元与识别认证单元对接,其中识别认证单元用于判定车辆需要装载的化工厂危化品,并对车辆进行超装监控,用于保障车辆的安全装载,所述现场操作单元分别与语音广播单元和远程监控单元对接,其中语音广播单元用于实现远程语音交流,所述远程监控单元用于对现场操作单元进行实时监控。
7.通过采用上述技术方案,通过雷达扫描目标自动图形识别、通过pc自动计算运行轨迹,发命令给plc控制机械臂三轴角度运动,精准定位到目标位置,实现控制装车,完全解放人力,实现现场无人装车,真正实现机械化减人、自动化换人,降低高危岗位现场作业人员数量。
8.本发明进一步设置为:所述现场操作单元包括plc控制模块、气动马达控制模块和
编码器,其中气动马达控制模块用于驱动机械臂操控鹤管进行x、y和z方向的移动,所述编码器用于记录鹤管的移动距离,所述plc控制模块用于接收雷达识别单元发送的车辆管口三维坐标值和移动轨迹数据,整合编码器记录的鹤管移动距离,用于保证鹤管和车辆管口的对准。
9.通过采用上述技术方案,利用编码器保证移动距离的精准有效,保证鹤管移动后与车辆管口的有效对准,并且通过气动马达驱动机械臂操控鹤管进行x、y和z方向的移动,实现了气动鹤管的三轴角度移动,使得气动鹤管可以有效按照移动轨迹进行移动,进一步的保证了定位的精准有效。
10.本发明进一步设置为:所述远程控制单元包括操控面板和通讯收发模块,其中操控面板具体包括摇杆、按钮和控制器,用于发送控制信号,所述通讯收发模块包括485通讯模块发送端和485通讯模块接收端,实现控制信号的发送和接收。
11.通过采用上述技术方案,为系统提供手动操控方案,配合远程监控单元的设置,使得工人可以对鹤管进行远程操控,进一步保证装车过程中的安全性。
12.本发明进一步设置为:所述雷达识别单元包括雷达成像模块、图像识别模块和坐标展示模块,所述雷达成像模块用于进行静置车辆及周边环境的三维成像,所述图像识别模块用于对雷达成像模块获取的静止车辆管口进行三维坐标提取,生成鹤管的移动轨迹,所述坐标展示模块用于收集车辆管口三维坐标信息,并将车辆管口三维坐标信息和移动轨迹数据传输到现场操作单元中。
13.通过采用上述技术方案,利用三维成像雷达对车辆环境周边环境进行扫描,为系统的定位处理提供原始数据,配合图形识别的设置,有效识别管口的位置,实现数字化定位的效果,并且自动生成移动轨迹,为气动鹤管的移动提供了有效的控制指令,保证无人装车的顺利实施。
14.本发明进一步设置为:所述识别认证单元包括身份标识模块、身份验证模块和定量控制模块。
15.本发明进一步设置为:所述身份标识模块作为验证卡片,用于记录车辆、车主身份信息以及车辆需要装载的化工厂危化品信息,所述身份验证模块作为读卡器,用于判定车辆是否为对应化工厂危化品装载车辆,所述定量控制模块用于对车辆进行超装监控,用于保障车辆的安全装载。
16.通过采用上述技术方案,通过雷达图像识别得到坐标从而控制机械臂精准运动实现无人操作,配合识别认证单元的一卡通设置,实现全新无人装车功能,为企业建立数字化监控,把原始和传统人抬危化品行业装车操作解脱出来,减少事故发生,避免安全事故的同时,提高了装车效率。
17.本发明进一步设置为:所述语音广播单元包括对讲话筒、喇叭、交换机和光纤收发器,用于实现远程的语音信息交流。
18.本发明进一步设置为:所述远程监控单元包括摄像头、交换机、上位机电脑、单片机和上位机软件,用于对现场操作单元进行画面实时监控。
19.进一步说明,利用摄像头对车辆及鹤管所处画面进行实时监控,其中在不操作鹤管时进行全局显示,在操作鹤管时只显示当前鹤管视频,更直观的向监察人员提供监察画面。
20.(三)有益效果本发明提供了一种无人装车系统。具备以下有益效果:(1)该无人装车系统,通过雷达扫描目标自动图形识别、通过pc自动计算运行轨迹,发命令给plc控制机械臂三轴角度运动,精准定位到目标位置,实现控制装车,完全解放人力,实现现场无人装车,真正实现机械化减人、自动化换人,降低高危岗位现场作业人员数量。
21.(2)该无人装车系统,通过远程控制单元的设置,为系统提供手动操控方案,配合远程监控单元的设置,使得工人可以对鹤管进行远程操控,进一步保证装车过程中的安全性。
22.(3)该无人装车系统,通过雷达图像识别得到坐标从而控制机械臂精准运动实现无人操作,配合识别认证单元的一卡通设置,实现全新无人装车功能,为企业建立数字化监控,把原始和传统人抬危化品行业装车操作解脱出来,减少事故发生,避免安全事故的同时,提高了装车效率。
23.(4)该无人装车系统,通过利用编码器保证移动距离的精准有效,保证鹤管移动后与车辆管口的有效对准,并且通过气动马达驱动机械臂操控鹤管进行x、y和z方向的移动,实现了气动鹤管的三轴角度移动,使得气动鹤管可以有效按照移动轨迹进行移动,进一步的保证了定位的精准有效。
24.(5)该无人装车系统,通过利用三维成像雷达对车辆环境周边环境进行扫描,为系统的定位处理提供原始数据,配合图形识别的设置,有效识别管口的位置,实现数字化定位的效果,并且自动生成移动轨迹,为气动鹤管的移动提供了有效的控制指令,保证无人装车的顺利实施。
25.(6)该无人装车系统,通过利用摄像头对车辆及鹤管所处画面进行实时监控,其中在不操作鹤管时进行全局显示,在操作鹤管时只显示当前鹤管视频,更直观的向监察人员提供监察画面。
附图说明
26.图1为本发明的系统原理框图;图2为本发明现场操作单元的系统原理框图;图3为本发明远程控制单元的系统原理框图;图4为本发明雷达识别单元的系统原理框图;图5为本发明识别认证单元的系统原理框图。
27.图中,1、现场操作单元;2、远程控制单元;3、雷达识别单元;4、识别认证单元;5、语音广播单元;6、远程监控单元;7、plc控制模块;8、气动马达控制模块;9、编码器;10、操控面板;11、通讯收发模块;12、雷达成像模块;13、图像识别模块;14、坐标展示模块;15、身份标识模块;16、身份验证模块;17、定量控制模块。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1-5,本发明实施例提供以下两种技术方案:实施例一、一种无人装车系统,包括现场操作单元1和远程控制单元2,现场操作单元1用于现场操作,通过气动马达控制机械臂操控鹤管进行x、y和z方向的移动,用于对准车辆管口,远程控制单元2与现场操作单元1对接,且远程控制单元2用于远程操控气动马达运行,现场操作单元1与雷达识别单元3对接,其中雷达识别单元3用于识别车辆管口位置,并获取车辆管口的三维坐标值,计算出鹤管移动轨迹,并将车辆管口的三维坐标值和移动轨迹数据同步到现场操作单元1中,雷达识别单元3与识别认证单元4对接,其中识别认证单元4用于判定车辆需要装载的化工厂危化品,并对车辆进行超装监控,用于保障车辆的安全装载,现场操作单元1分别与语音广播单元5和远程监控单元6对接,其中语音广播单元5用于实现远程语音交流,远程监控单元6用于对现场操作单元1进行实时监控,进一步说明,通过雷达扫描目标自动图形识别、通过pc自动计算运行轨迹,发命令给plc控制机械臂三轴角度运动,精准定位到目标位置,实现控制装车,完全解放人力,实现现场无人装车,真正实现机械化减人、自动化换人,降低高危岗位现场作业人员数量。
30.实施例二、本实施例作为上一实施例的改进,一种无人装车系统,包括现场操作单元1和远程控制单元2,现场操作单元1用于现场操作,通过气动马达控制机械臂操控鹤管进行x、y和z方向的移动,用于对准车辆管口,作为详细说明,车辆管口采用气动阀门来控制启闭,由车辆司机来负责打开或者关闭,并且打开时,车辆处于熄火状态,其中车辆司机打开气动阀门前,需要完成车辆管口的识别,具体的,如附图2所示,现场操作单元1包括plc控制模块7、气动马达控制模块8和编码器9,其中气动马达控制模块8用于驱动机械臂操控鹤管进行x、y和z方向的移动,编码器9用于记录鹤管的移动距离,plc控制模块7用于接收雷达识别单元3发送的车辆管口三维坐标值和移动轨迹数据,整合编码器9记录的鹤管移动距离,用于保证鹤管和车辆管口的对准。
31.需要说明的时,车辆驶入现场后,在装车之前,车辆上人员下车将车辆钥匙交管到钥匙管理处进行统一管理,并且对人员进行静电释放,对车辆进行接地处理。
32.作为优选方案,远程控制单元2与现场操作单元1对接,且远程控制单元2用于远程操控气动马达运行,具体的,如附图3所示,远程控制单元2包括操控面板10和通讯收发模块11,其中操控面板10具体包括摇杆、按钮和控制器,用于发送控制信号,通讯收发模块11包括485通讯模块发送端和485通讯模块接收端,实现控制信号的发送和接收。
33.作为优选方案,现场操作单元1与雷达识别单元3对接,其中雷达识别单元3用于识别车辆管口位置,并获取车辆管口的三维坐标值,计算出鹤管移动轨迹,并将车辆管口的三维坐标值和移动轨迹数据同步到现场操作单元1中,具体的,如附图4所示,雷达识别单元3包括雷达成像模块12、图像识别模块13和坐标展示模块14,雷达成像模块12用于进行静置车辆及周边环境的三维成像,图像识别模块13用于对雷达成像模块12获取的静止车辆管口进行三维坐标提取,生成鹤管的移动轨迹,坐标展示模块14用于收集车辆管口三维坐标信息,并将车辆管口三维坐标信息和移动轨迹数据传输到现场操作单元1中。
34.作为优选方案,雷达识别单元3与识别认证单元4对接,其中识别认证单元4用于判定车辆需要装载的化工厂危化品,并对车辆进行超装监控,用于保障车辆的安全装载,具体的,如附图5所示,识别认证单元4包括身份标识模块15、身份验证模块16和定量控制模块17,身份标识模块15作为验证卡片,用于记录车辆、车主身份信息以及车辆需要装载的化工厂危化品信息,身份验证模块16作为读卡器,用于判定车辆是否为对应化工厂危化品装载车辆,定量控制模块17用于对车辆进行超装监控,用于保障车辆的安全装载。
35.进一步说明,定量控制模块17的具体操作如下:a、定量装车控制:根据流量计信号换算成累计量,配合防溢流探杆功能达到定量及安全控制;b、掉电保持功能:系统异常断电,重新上电系统能记录上次装车量防止超装;c、阀门多段关阀控制功能,防止对管路冲击,减少水锤效应;d、钥匙管理连锁功能,管理司机钥匙防止未装完发动车辆;e、防溢流连锁控制:当出现异常超装情况,系统会自动连锁切断阀门。
36.作为优选方案,现场操作单元1分别与语音广播单元5和远程监控单元6对接,其中语音广播单元5包括对讲话筒、喇叭、交换机和光纤收发器,用于实现远程语音交流,远程监控单元6包括摄像头、交换机、上位机电脑、单片机和上位机软件,用于对现场操作单元1进行实时监控。
37.需要说明的是,不操作鹤管时进行全局显示,在操作鹤管时只显示当前鹤管视频。
38.实施例二相对于实施例一的优点在于:利用编码器9保证移动距离的精准有效,保证鹤管移动后与车辆管口的有效对准,并且通过气动马达驱动机械臂操控鹤管进行x、y和z方向的移动,实现了气动鹤管的三轴角度移动,使得气动鹤管可以有效按照移动轨迹进行移动,进一步的保证了定位的精准有效,利用三维成像雷达对车辆环境周边环境进行扫描,为系统的定位处理提供原始数据,配合图形识别的设置,有效识别管口的位置,实现数字化定位的效果,并且自动生成移动轨迹,为气动鹤管的移动提供了有效的控制指令,保证无人装车的顺利实施,利用摄像头对车辆及鹤管所处画面进行实时监控,其中在不操作鹤管时进行全局显示,在操作鹤管时只显示当前鹤管视频,更直观的向监察人员提供监察画面。
39.工作时,车辆停止到位后,将身份标识模块15即验证卡片在身份验证模块16即读卡器上读取,判定车辆为对应化工厂危化品装载车辆后,通过雷达成像模块12进行车辆三维成像扫描,随后通过图像识别模块13根据三维扫描成像,进行管口处三维坐标的识别定位,计算出鹤管移动至车辆管口的轨迹后,通过坐标展示模块14将三维坐标信息和移动轨迹信息一同发送到现场操作单元1中,plc控制模块7根据移动轨迹数据控制气动马达控制模块8驱动机械臂操控鹤管按照移动轨迹进行移动,(也可通过操控面板10进行远程操控),监察人员通过远程监控单元6进行远程视频查看和监控,并且可以通过语音广播单元进行远程语音喊话提醒现场车辆出入厂。
40.具体的操作流程如下:a、车辆驶入装车区域;b、人员下车把钥匙插入钥匙管理处;c、释放人体静电及车辆接地;d、设置挡车器,防止未装完车,司机发动车辆,起到提示及阻挡作用,挡车器档杆
落下后,禁止启动车辆;e、拿出验证卡片在读卡器上刷卡(读卡器上显示应装车信息如单位、车牌号、装车量信息);f、远程控制单元2或者雷达识别单元3操控现场操作单元1,配合远程监控单元6和语音广播单元5操作鹤管插入车辆管口;g、打开车辆装载的气动阀门,进行装车;h、到量关闭阀门,系统延迟自动吹扫鹤管(防止抬起鹤管滴残液);i、远程摇杆抬起鹤管臂归位;j、取钥匙,静定接地夹归位,档杆抬起,驾驶车辆驶离。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。