1.本发明涉及一种人工晶状体(iol)。更具体地,本发明涉及一种具有扩展的焦深(edof)的人工晶状体。
背景技术:
2.眼睛的天然晶状体中与年龄相关的蛋白质的变化可导致白内障的形成。在白内障手术中,通常用iol代替天然晶状体。
3.通过选择通常适应远距离的适当的iol焦度,单焦点iol的植入通常会提供良好质量的视觉。
4.然而,植入iol的眼会丧失剩余调节的能力。因此,在需要更精细视觉的活动中,植入单焦点iol的患者通常需要佩戴近距离、中距离的眼镜。这指的是可能会对患者的日常生活有强烈影响的广泛的活动,诸如阅读和计算机工作。
5.如今,患者越来越希望在白内障手术后避免佩戴近视眼镜。为了弥补上述单焦点iol的不足,多焦点iol的应用越来越广泛。
6.然而,多焦点iol通常具有有限数量的两个或三个焦点,同时在焦距外提供较差的视觉质量。在例如设计为分别具有用于近距离和远距离的两个焦点的双焦点iol的情况下,这可能导致中间视力的困难,然后导致患者必须佩戴眼镜。衍射多焦点iol的特定情况下的另一个缺点与高衍射级下存在一定比例(约18%)的入射光损失有关,这会产生在视觉有用的距离范围外的焦点。此外,多焦点iol还存在其他不利的副作用,诸如散射光、光晕和眩光。
技术实现要素:
7.本发明的目的是提供一种人工晶状体,该人工晶状体在远距离和中距离处呈现更好质量的视觉,同时使上述副作用最小化。
8.为此,本发明提供一种人工晶状体,该人工晶状体包括:
9.‑ꢀ
(单个)前光学表面,和
10.‑ꢀ
(单个)后光学表面,
11.两者都围绕光学轴并且相对于光学轴基本上径向向外地延伸;
12.其特征在于:
[0013]-前光学表面和后光学表面中的第一表面由以下方程定义:
[0014][0015]
其中:
[0016]
·zst
(r)是沿光学轴测量的、从第一表面的顶点到第一表面的任一点的位移矢量的分量,该第一表面的任一点和光学轴相距半径r(被认为是径向变量);
[0017]
·rst
(∈r\{0})是在(其)顶点评估的第一表面的曲率半径;
[0018]
·
κ
st
(r
st
)是(其)顶点处评估的第一表面的二次曲线常数,并通过以下关系式定义为第一表面的所述曲率半径r
st
的函数:
[0019][0020]
其中erf表示(该)高斯误差函数,且其中a、b、c、a、b、c、d是恒定的实数,以使得:
[0021]
a∈[0.050;0.075],b∈[-1;0],c∈[-20;0],a∈[-41;-39],
[0022]
b∈[0.07;0.13],c∈[-2.6;-2.0]以及d∈[0.75;1.25]
[0023]
·
(对于每个i≥2)(∈r)是第一表面的2i阶的非球面系数;
[0024]-前光学表面和后光学表面中的第二表面由以下方程定义:
[0025][0026]
其中:
[0027]
·znd
(r)是沿所述光学轴(z)测量的、从第二表面的顶点到第二表面的任一点的位移矢量的分量,该第二表面的任一点和光学轴相距半径r(被认为是径向变量);
[0028]
·rnd
<0是在(其)顶点评估的第二表面的曲率半径;
[0029]
·
κ
nd
(r
nd
)是在(其)顶点处评估的第二表面的二次曲线常数,并通过以下关系式定义为第二表面的所述曲率半径r
nd
的函数:
[0030][0031]
其中f、g、h是恒定的实数,以使得:
[0032]
f∈[0.08;0.12],g∈[1.0;1.6],h∈[0;9],
[0033]
·
(对于每个i≥2)(∈r)是第二表面的2i阶非球面系数;
[0034]
前光学表面和后光学表面(或等效地,所述第一表面和第二表面)使得人工晶状体提供扩展的焦深。
[0035]
根据本发明的人工晶状体(iol)在远距离和中距离处呈现更好质量的视觉(例如,与用于远距离和近距离的具有两个焦点的双焦点iol相比),同时既最小化诸如散射光、光晕和眩光的副作用,又在远距离处提供更好质量的视觉(例如,与标准单焦点iol相比)。
[0036]
事实上,iol包括光学器件(或中心光学部件),该光学器件包括由相同形式的方程描述的前表面(所谓的前光学表面)和后表面(所谓的后光学表面)。本领域技术人员众所周知,这样的方程定义了非球面的表面(如在具体实施方式中所陈述的,鉴于下文介绍的图
4)。因此,前光学表面和后光学表面都是非球面的,从而提供了具有完全非球面设计的光学器件,与标准单焦点iol相比,该光学器件产生更多负球面像差,并且允许在表面方程参数的贡献下焦深的扩展(即,提供单个拉长的焦点以增强“视觉范围”)。鉴于下文介绍的图6a-c、图7、图8、图9a-c(这些图呈现了实验测量值的结果),在具体实施方式中对此进行了补充评论和说明。
[0037]
根据本发明的iol可被视为单焦点iol,因为它使得单个焦点被拉长(对于单焦点iol)以增加焦深(或视觉范围)。它不是构思为在焦点间具有规则光焦度图的多焦点iol,也不是构思为多区域光焦度iol。这一点是很明显的,因为大多数单焦点iol只能矫正视力以帮助白内障患者看到(远)距离的事物,因此无法改善许多重要日常任务所需的中间视力。不同的是,本单焦点iol(具有拉长的焦点)提供了改进质量的中间视觉以及良好的(远)距离视觉,这是一项重大进步,使患者在日常生活中更容易行动。
[0038]
根据本发明的iol有利地提供了扩展的焦深(edof),同时对峰值(即最佳焦点)分辨率的影响最小,在中距离处提供了清晰的视觉,并且最小化了对于多焦点iol常见的副作用,诸如散射光、光晕和眩光。事实上,折射型多焦点iol通常包括分成多个部分(具有可能由不同方程描述的表面几何形状)的多区域光学器件(然后是前光学表面和后光学表面),由于这些部分之间的几何形状和/或光焦度的突然变化,这可能导致衍射问题,例如光晕。不同地,本发明的iol包括单个连续且规则的(或换句话说,至少可微分或平滑的)前光学表面和单个连续且规则的后表面,每个表面都是非球面的并且由单个平滑方程描述,这防止了这种光晕。本领域技术人员将清楚地理解,(通常)可以通过简单的轮廓比较或叠加,或如果需要更深入的分析,通过获得iol表面(的截面曲线)上的点的测量值,并将这些测量值与用于确定iol光学表面方程的方程进行比较,来检查iol光学表面是否满足这样的方程。也可应用iol光学性能,例如edof或具体实施方式中所述的其他性能来比较。
[0039]
根据本发明的iol优选是折射型的,更优选是纯折射型的。更尤其是,由前表面和后表面光学地提供的特性优选地是折射型的。然而,包括任何衍射特征(例如分量、光学表面的一部分......)的iol不排除在本发明的范围之外。
[0040]
本发明的另一个重要方面是要求保护的edof以有限的方式依赖于(或,换句话说,相对独立于)以下各项:
[0041]-iol的光焦度,
[0042]-孔径(即光穿过的开口;例如,当该iol在无晶状体眼中正常使用时的眼睛瞳孔直径),和
[0043]-角膜球面像差(例如,角膜模型的球面像差,或当iol在无晶状体眼中正常使用时眼睛角膜的球面像差)。
[0044]
基于下文介绍的图6a-b和图7,在具体实施方式中对此进行补充说明。然而,依赖iol光焦度的edof、孔径和角膜球面像差的良好控制也可以从定义前光学表面和后光学表面的非球面方程中理解。事实上,本领域技术人员已知,来自光学表面的光焦度通常取决于与构成该表面的原材料相关联的折射率以及该表面的几何形状。该表面的几何形状由曲率半径确定(至少对于小阶的r),以及(可选地)由其顶点处评估的该光学表面的二次曲线常数确定。在本文中,合理的假设是,折射率以及前光学表面和后光学表面的每个对整体iol的光焦度的贡献都是已知的。此外,前光学表面和后光学表面的二次曲线常数的每个通过
全新的、特定的和非常有利的平滑关系式定义为该表面的曲率半径的函数。因此,至少在小阶数时,对于每个iol的光焦度,前光学表面和后光学表面的每个的特征为其曲率半径。由于这些参数与iol的光焦度之间的所有关系式都是规则的,因此前光学表面和后光学表面的几何形状相对于iol的光焦度的变化都是预定的和规则的,这允许(至少局部地)相对于iol的光焦度、孔径和角膜球面像差,edof的非常有利的受控和规则的变化。
[0045]
相对于iol的光焦度,前光学表面和后光学表面方程中的参数的这些直接或间接受控制的规律变化对于实现这种技术效果是非常重要的。尤其是,必须强调的是,本发明通过考虑有限的(limited)edof依赖性这一目标,提出了方程参数的整体优化。对于每个iol光焦度,不对每个参数独立地进行任何单独的优化,这将是一种更简单的方法,但也会产生对iol光焦度的高edof依赖性。
[0046]
此外,并且有利地,本发明还考虑了与该iol相关的调制传递函数(mtf)(即,用于评价晶状体性能的光学工作台测量值,粗略地说是图像分辨率函数;更具体地,这个函数是本领域技术人员已知的,并且该函数指定捕获多少对比度作为空间频率的函数。一般而言,最佳焦点处(即远距离)的mtf与edof成反比,这使得很难同时获得mtf和对光焦度、配有光学工作台的模型角膜的球面像差以及孔径edof受限的依赖性。但是,在本发明的情况下,定义前光学表面和后光学表面的方程参数以这样的方式变化,以获得这样的受限依赖性。基于下文介绍的图6c和图8,这在具体实施方式中进行说明。恒定的实数的区间是围绕下文详述的特定优选值选择的。对于所考虑的光焦度(光焦度依赖光学表面的曲率半径),这些值在提供优化的edof或优化的mtf之间具有规则的良好折衷,在这个意义上,对于由平均折射率(例如,约1.52)的平均(average,普通)生物原材料制成的光学表面,这些值优化了edof和mtf这两者。为了顾及可能因生物原材料选择和/或iol制造工艺而产生的这种值的变化,考虑包括这种实际不确定性的上述区间是非常有价值的(relevant,相关的)。
[0047]
本发明的另一个优点是,基于通过使用当前技术的制造,edof、iol光焦度和方程参数之间的这些关系式使得更容易设计不同光焦度的iol,因为它可以通过利用所述方程以及关系式κ
st
(r
st
)和κ
nd
(r
nd
)来构造。更一般地,可以指出,以前光学表面和后光学表面的曲率半径的函数来表示根据本发明的iol的表面的二次曲线常数的这些新关系式有利地打开了设计和/或制造iol(尤其是包括光学表面的单焦点iol,该光学表面的二次曲线常数通过这些关系式之一表示为其曲率半径的函数)的技术视角。
[0048]
在本文件的框架内,眼睛的“光学轴”优选地在于从一侧穿过眼到另一侧的矢量,该矢量由其前段指向其后段,该前段依次包括角膜、虹膜和(天然晶体状或要求保护的人工)晶状体,该后段尤其包括视网膜。对于在眼睛中的植入位置的根据本发明的iol,眼睛的光学轴从前表面指向后表面,并且优选地对应于相对于iol固有(intrinsically)定义的光学轴。尤其是,术语光学轴目前且优选地在本文中用作相对于眼睛和/或iol的参考轴。
[0049]
在本文件的框架内,相对于由光学轴限定的矢量,眼或iol的一部分的“前”(或分别地,“后”)侧和/或表面优选地在于位于眼或iol的该部分的上游的(或分别地,下游)的一侧和/或表面。例如,在眼中,虹膜相对(天然晶体状或要求保护的人工)晶状体而位于前方;虹膜的后表面因此是虹膜最靠近该晶状体的部分。同样,当眼或iol的第一部分在眼或iol的第二部分前面(或分别在后面)的上方时,则该第一部分相对于该第二部分位于前面(或分别地,后面)。同样,当通过在与由光学轴限定的矢量(即,跟随光线传播)相同的方向和相
同的指向上观察光学表面,光学表面看着是凹的(分别地,凸)时,将当它称为“前凹(分别地,凸)”;当通过以与光学轴所定义的矢量相同的方向和相反的指向观察光学表面,光学表面看着是凹的(分别地,凸),将它称为“后凹(分别地,凸)”。相对于眼和/或iol的部分的前面(anteriority)、后面(posteriority)或甚至是光学轴的上述概念是本领域技术人员已知的。
[0050]
在本发明的框架内,第一表面和第二表面总是不同的。优选地,在整个文件的框架内,第一表面是前光学表面,第二表面是后光学表面。然而,可以在本发明的框架内翻转iol表面,同时保持本文上面详述的主要的有利光学特性。为了便于阅读,在本文件的框架内,当具体涉及前光学表面的或后光学表面的参数时,方程式参数的指示符号st和nd由指示符号ant和post代替。例如,r
ant
和r
post
分别对应于前光学表面和后光学表面的曲率半径(在它们各自的顶点评估的)。当第一表面和第二表面分别被认为是前光学表面和后光学表面时,在本文件的框架内,指示符号st和nd也分别由指示符号ant和post代替。
[0051]
在本发明的框架内,如本领域技术人员通常所知,光学表面(例如,前光学表面或后光学表面)的“顶点”优选地定义为该光学表面与光学轴的交点。
[0052]
在本发明的框架内,在表面的顶点处评估的非球面的表面(例如,前光学表面或后光学表面)的“曲率半径”是所述顶点与该顶点处的表面的曲率中心之间的距离。该曲率半径的常规符号优先定义为沿光学轴测量的、从所述顶点到所述曲率中心的位移(矢量)分量的符号。那么,如果且仅在其顶点处评估的曲率半径为负(分别地,正),前光学表面在其顶点处向前凹(分别地,前凸),当且仅当在其顶点评估的曲率半径为正时(分别地,负),后光学表面在其顶点处是后凹(依次地,后凸)。尤其是,对于根据本发明的iol,当r
nd
<0时,iol的第二表面在其顶点处及其顶点周围后凸并且前凹。
[0053]
根据本领域技术人员的术语,如果r
ant
>0且r
post
<0,即如果且仅当前光学表面是前凸的并且如果后光学表面是后凸的,则将根据本发明的iol称为“双凸”。根据本领域技术人员的术语,如果r
ant
<0且r
post
<0,即如果前光学表面是前凹的并且如果后光学表面是后凸的,则将根据本发明的iol称为“凹-凸”。本领域技术人员的这些术语描述了iol的外观,在前面看到的是前光学表面,在后面看到的是后光学表面。
[0054]
在本发明的框架内,当iol的一部分优选地按照垂直于光学轴的矢量延伸时,它被称为“径向向外”延伸,从与光学轴共有的点指向以该共有点为中心的圆上的点。同样,当iol的一部分优选地沿垂直于光学轴的平面上的至少一个圆(该圆以平面和光学轴的交点为中心)的弧线延伸时,它被称为“周向”延伸。
[0055]
本领域技术人员已知,形容词“远侧”是指身体的一部分中离某个参考器官或身体躯干最远的部分,而形容词“近侧”是指身体的一部分中离某个参考器官或身体躯干最近的另一部分。在本文件的框架内,关于相对于参考光学轴的距离,这两个定义将优先应用于根据本发明的眼的部分和/或iol的部分。
[0056]
在本发明的框架内,术语“中距离”优选地是指如在计算机工作或看汽车速度计时的(约和/或大约的)臂长距离。更优选地,该术语指的是在0.2米和1.6米之间,更优选地,在0.4米和1.0米之间的距离。
[0057]
在本发明的框架内,回忆一些常用的数学表达式的含义:
[0058]
·
ꢀ“
<0”表示“负”,即严格小于0;
[0059]
·
ꢀ“
>0”表示“正”,即严格大于0;
[0060]
·
ꢀ“
≤0”表示“非正”,即小于或等于0;
[0061]
·
ꢀ“
≥0”表示“非负”,即大于或等于0;
[0062]
·
ꢀ“
∈”表示“属于”;
[0063]
·
r实数集;
[0064]
·
ꢀ“
r\{0}”指非零实数集;
[0065]
· 对于γ∈r且δ∈r使得γ<δ,“[γ,δ]”是指在γ和δ之间的数的闭合区间,其中包含γ和δ。
[0066]
此外,也众所周知爱因斯坦求和约定:
[0067]
∑
i≥2
α
2ir2i
=α4r4 α6r6 α8r8 α
10r10
...,
[0068]
这里的指示符号“i”是大于或等于2的整数。
[0069]
在本文件的框架内,由erf表示的“高斯误差函数”是指众所周知的由下式(尤其是)在实数上定义的s形的可逆的整个特殊函数。
[0070][0071]
在本发明的框架内,用于函数或表面的术语“规则的”优选地指至少可微分的(或光滑的)函数或表面。在本发明的框架内,不应该将术语
“……
的函数”、“依赖于”和类似的术语限制性地解释为对指定参数的有限依赖,除非明确地写出这样的限制。
[0072]
在本文件的框架内,使用不定冠词“一”、“一个”或定冠词“该”来引入一个元件,但并不排除存在多个这些元件。在本文件中,术语“第一”、“第二”、“第三”等仅用于区分元件,并不意味着这些元件中的任何顺序。
[0073]
在本文件的框架内,动词“包含”、“包括”、“涉及”或任何其他变体以及它们的词形变化的形式的使用不能以任何方式排除除了提到的那些元件之外的其他元件的存在。
[0074]
根据本发明的优选实施方式,iol具有介于10d和35d之间的光焦度。可选地,它不同于13.5d和/或14d。
[0075]
在本文件的框架内,iol的“光焦度”优选地是在以直径为3mm的光学轴为中心的(读取)窗口内不经校正而测量的平均光焦度。
[0076]
根据本发明的一个优选实施方式,在关系式κ
st
(r
st
)和κ
nd
(r
nd
)的定义中涉及的恒定的实数处于以下受限制的值的区间中:
[0077]
a∈[0.060;0.075]和/或b∈[-0.5;-0.2]和/或c∈[-12;-10]
[0078]
和/或a∈[-40.1;-39.9]和/或b∈[0.080;0.095]和/或c∈[-2.35;-2.05]和/或d∈[0.90;1.1]
[0079]
和/或f∈[0.085;0.105]和/或g∈[1.05;1.40]和/或h∈[3;6]。
[0080]
可以单独考虑这些区间,也可以组合考虑这些区间。例如,这些恒定的实数的第一部分可在[0008]段的更宽区间内考虑,而这些恒定的实数的第二部分可在这些受限制的区间内考虑。可选地,组合考虑这些受限制的区间,所有术语“和/或”优选地是“和”。可替代地,这些恒定的实数位于比[0008]段的区间的更小的值的区间中,从而:
[0081]
a∈[0.055;0.070]和/或b∈[-0.7;-0.2]和/或c∈[-15;-5]
[0082]
和/或a∈[-40.5;-39.5]和/或b∈[0.08;0.10]和/或c∈[-2.4;-2.2]和/或d∈
[0.85;1.15]
[0083]
和/或f∈[0.09;0.11]和/或g∈[1.20;1.45]和/或h∈[3;7]。
[0084]
可以单独考虑这些区间,也可以组合考虑这些区间。例如,这些恒定的实数的第一部分可以在[0008]段的更宽区间内考虑,这些恒定的实数的第二部分可以在上述受限制的区间内考虑,这些恒定的实数的第三部分可以在这些其他更小的区间内考虑。可选地,组合考虑这些其它更小的区间,所有的术语“和/或”优选地是“和”。这些恒定的实数位于值的更小的区间内,使得:
[0085]
a∈[0.060;0.065]和/或b∈[-0.5;-0.3]和/或c∈[-12;-10]
[0086]
和/或a∈[-40.1;-39.9]和/或b∈[0.090;0.095]和/或c∈[-2.35;-2.25]和/或d∈[0.9;1.1]
[0087]
和/或f∈[0.095;0.105]和/或g∈[1.25;1.40]和/或h∈[4;6]。
[0088]
可以单独考虑这些区间,也可以组合考虑这些区间。例如,这些恒定的实数的第一部分可以在[0008]段的更宽区间内考虑,这些恒定的实数的第二部分可以在上述受限制的区间内考虑,这些恒定的实数的第三部分可以在上述其他更小的区间内考虑,这些恒定的实数的第四部分可以在这些进一步更小的区间内考虑。非常可选地,组合考虑这些区间,所有术语“和/或”优选地是“和”。如上所述,区间的选择对应于不确定性,例如,在生物原材料的选择和/或人工晶状体的制造工艺上的不确定性。这种不确定性可在用于(在给定的iol光焦度下)优化iol的edof和mtf的曲率半径或曲线常数的选择上引起轻微的变化。
[0089]
这些恒定的实数中每一个的精确值可选地给定为:
[0090]
a=0.0621和/或b=-0.396和/或c=-11.035
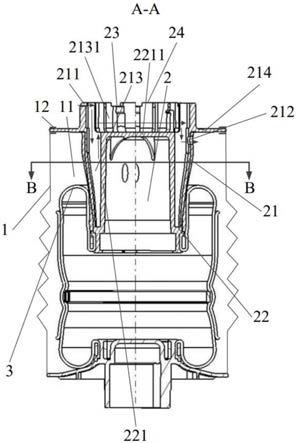
[0091]
和/或a=-40和/或b=0.092和/或c=-2.29和/或d=1
[0092]
和/或f=0.0989和/或g=1.277和/或h=4.663。
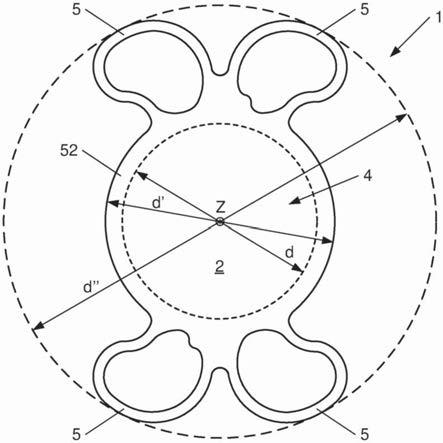
[0093]
这些值中的每一个可以单独考虑,或与一个或多个其他值结合考虑,所有术语“和/或”优选地是“和”。上面提到的恒定的实数值的区间是围绕这些特定值的。必须指出的是,这些值可以通过为定义前光学表面和后光学表面的非球面方程的曲率半径和圆锥常数选择的特定实值的插值(interpolation)和/或近似曲线来获得。尤其是,尽管这种精确值的选择提供了根据本发明的iol,但是围绕这些精确值的变化完全在本发明的范围内。基于下文介绍的图5a-c,在具体实施方式中对此进行了补充说明。这就是为什么将“包络(envelops)”视为围绕由精确值选择限定的两个关系式κ
st
(r
st
)和κ
nα
(r
nd
)的图的不确定性的余地(margin)是有意义的。根据本发明,以上述区间的形式考虑这些包络,但是也可以定义其他类型的包络。尤其是,根据本发明的独立优选实施方式:
[0094][0095][0096]
[0097]
(注明(
★
)的关系式)其中,对于每一个j∈{1,2,3},pj是数字,pj≥10,并且可选地,pj=10,更可选地,pj=20,更可选地pj=50。本领域技术人员将理解,考虑到所有上述精确值,这些关系式表示第一表面和第二表面的真实的二次曲线常数分别地“足够接近”由关系式κ
st
(r
st
)和κ
nd
(r
nd
)定义的曲线常数。通过“足够接近”,必须理解相关的相对偏差的绝对值以1/pj为界。通过选择精确值来定义的两个关系式κ
st
(r
st
)和,偏差1/pj还可以实现对所述插值和/或近似值的评估,然后偏差1/pj可以根据后者而变化。作为非限制性说明性实例,对于上述精确值,可以考虑p1=10,p2=15,pj=20。这些偏差还定义了与上述区间相结合的另一种这样的包络。可替代地,可以单独考虑这些包络,代替包括恒定的实数的[0008]段的区间,从而在本发明的相同框架内定义可替代的发明。在这种情况下,关系式(
★
)可以用下式来概括:
[0098][0099][0100][0101]
其中a、b、c、a、b、c、d、f、g、h可以是本文件中明确公开的任何值,尤其是在[0034]-[0036]段和[0070]-[0073]段中的值,并且其中,每一个j∈{1,2,3},pj是大于或等于10的数字,并且可选地,pj=10,更可选地,pj=20,更可选地pj=50。
[0102]
对于前光学表面和后光学表面的曲率半径和曲线常数的具体选择,可认为其他精确值更为准确。作为例子,对于光焦度小于或等于27.5d的iol,恒定的实数f、g和h更优选精确地由下式给出:f=0.1032和/或g=1.372和/或h=5.1353。更优选组合考虑这些值,术语“和/或”优选地是“和”。这将在下文中基于图5c具体说明。作为另一个例子,上述值b=0.092和/或c=-2.29可以替换为b=0.081和/或c=-2.095(或,可选地,也可以替换为b=0.085和/或c=-2.168),从而提供了为定义前光学表面和后光学表面的非球面方程的曲率半径和二次曲线常数选择的特定值的另一近似曲线,以相对于至少iol光焦度的主要选择,平滑地实现期望的优化的edof和mtf。尤其是,根据本发明的独立的对应实施方式,关系式
[0103][0104]
和/或
[0105][0106]
和/或
[0107]
[0108]
如果iol的光焦度严格大于27.5d;和/或
[0109][0110]
如果iol的光焦度小于或等于27.5d;
[0111]
其中,对于每个j∈{1,2,3,4},优选满足p
j’≥10,优选地p4’
>p3’
。最后的这些关系式的全部或部分可以组合地和/或替换所有或部分的相关关系式(
★
)地考虑。
[0112]
根据本发明的第一优选实施方式,iol具有严格小于14d的光焦度,且r
st
<0。具体地,第一表面在其顶点处则是前凹以及后凸的。根据本发明的第二优选实施方式,iol具有大于或等于14d的光焦度,且r
st
>0。具体地,第一表面在其顶点处则是前凸以及后凹的。换句话说,结合这两个优选实施方式,优选地,当且仅当r
st
<0时,iol的光焦度严格小于14d。
[0113]
优选地,根据这些优选实施方式中的任一个,第一表面的曲率半径r
st
连续且规则地依赖于光焦度(依赖于光焦度的定义的上述被考虑的区间)。优选地且独立于这些优选实施方式,第二表面的曲率半径r
nd
连续且规则地依赖于人工晶状体的光焦度。各光学表面的曲率半径的变化的连续性和规律性是实现本发明的期望技术效果的自然的优选选择。它还意味着各光学表面的二次曲线常数的变化的规律性,因为其是以相关曲率半径的函数有规律地进行表示的。
[0114]
在本发明的框架内,前光学表面方程和后光学表面方程(优选两个光学表面方程)中的至少一个的非球面系数中的至少一个为非零的。iol光学器件采用非球面设计,由于这些非零的非球面系数的贡献,该非球面设计允许焦深的扩展。根据本发明的优选实施方式,前光学表面和/或后光学表面的小于或等于10阶的非球面系数是非零的。所有这些非零的非球面系数的贡献使得可获得非常高的edof性能。它具体地为前光学表面和/或后光学表面引入了完全非球面的几何形状,该前光学表面和/或后光学表面包括在中间光学直径处曲率的转折点(即拐点)的环。优选地,非球面系数的绝对值相对于它们的阶数递减和/或以0.1为界。更优选地,它们遵循以下关系式:
[0115][0116]
和/或,优选地和,
[0117][0118]
这些非球面系数对应于非球面的表面在其顶点周围的一般形式的侧面扰动(side perturbation)。优选地,前光学表面和/或后光学表面的严格大于10阶的非球面系数忽略不计和/或近似为零和/或等于零。换句话说,它们基本上等于零,且优选地等于零。
[0119]
优选地,前光学表面和/或后光学表面的非球面系数连续且规则地依赖于人工晶状体的光焦度。具体地,优选地,限定前光学表面和/或后光学表面的所有参数(曲率半径、二次曲线常数和非球面系数)规则地依赖于iol的光焦度。
[0120]
作为本发明的具体实施方式,现在为选择预定光焦度的iol的前光学和后光学(非球面的)表面提供精确方程:
[0121]
·
根据本发明的第一具体实施方式,iol的光焦度为15d,且
[0122]rant
=79.63mm和/或κ
ant
(r
ant
)=-80.00和/或
[0123]
和/或和/或
[0124]
和/或和/或
[0125]rpost
=-13.82mm和/或κ
post
(r
post
)=5.95和/或
[0126]
和/或和/或
[0127]
和/或
[0128]
·
根据本发明的第二具体实施方式,iol的光焦度为20d,且
[0129]rant
=21.60mm和/或κ
ant
(r
ant
)=-25.61和/或
[0130]
和/或和/或
[0131]
和/或和/或
[0132]rpost
=-15.21mm和/或κ
post
(r
post
)=8.10和/或
[0133]
和/或和/或
[0134]
如/或
[0135]
·
根据本发明的第三具体实施方式,iol的光焦度为25d,且
[0136]rant
=11.47mm和/或κ
ant
(r
ant
)=-3.67和/或
[0137]
和/或和/或
[0138]
和/或和/或
[0139]rpost
=-19.47mm和/或κ
post
(r
post
)=17.61和/或
[0140]
如/或和/或
[0141]
和/或
[0142]
对于上述各光焦度,优选相结合地考虑这些明确的数据。在本文件的框架内,对于干燥状态的iol,给出了作为前光学表面和后光学表面的几何参数提及的任何明确的数据。考虑到诸如构成iol的生物原材料和/或制造工艺和条件之类的因素会影响这些值,相对于在绝对值上至多10%,更优选地为5%的不确定性,这些值是可以接受的(appreciated)。。作为示例,这些第一、第二和第三具体实施方式的曲率半径可以分别由其他优选值代替,如:
[0143]-r
ant
=86.11mm,和/或r
post
=-14.00mm;和/或
[0144]-r
ant
=22.01mm,和/或r
ppst
=-15.42mm;和/或
[0145]-r
ant
=11.61mm,和/或r
post
=-19.88mm.
[0146]
而不改变其它方程参数值。
[0147]
现在描述前光学表面和后光学表面的表观几何形状。优选地,根据iol的光焦度大于或等于14d的本发明的实施方式:
[0148]-将垂直于光学轴的平面作为零高程参考平面,并将光学轴作为高程评估的参考轴,在前光学表面上的径向坐标上的高程图:
[0149]
·
在前光学表面的顶点处呈现局部最小值,
[0150]
·
从前光学表面的顶点到该表面的边缘递增;
[0151]-将垂直于光学轴的平面作为零高程参考平面,并将光学轴作为高程评估的参考轴,在后光学表面上的径向坐标上评估的高度图,呈现:
[0152]
·
在后光学表面的顶点处的局部最大值,
[0153]
·
在距后光学表面的边缘正距离处的外围局部最小值,
[0154]
·
位于所述局部最大值和所述外围局部最小值之间的拐点,
[0155]
和:
[0156]
·
从后光学表面的顶点到外围局部最小值递减,
[0157]
·
从外围局部最小值到该后光学表面的边缘递增。
[0158]
优选地,根据iol的光焦度严格大于12d且严格小于14d的本发明的实施方式:
[0159]-将垂直于光学轴的平面作为零高程参考平面,并将光学轴作为高程评估的参考轴,在前光学表面上的径向坐标上评估的高程图呈现:
[0160]
· 在前光学表面的顶点处的局部最大值,
[0161]
·
在距前光学表面的边缘正距离处的外围局部最小值,
[0162]
· 位于所述局部最大值和所述外围局部最小值之间的拐点,
[0163]
和:
[0164]
· 从前光学表面的顶点到所述外围局部最小值递减,
[0165]
· 从所述外围局部最小值到前光学表面的边缘递增。
[0166]-将垂直于光学轴的平面作为零高程参考平面,并将光学轴作为高程评估的参考轴,在后光学表面上的径向坐标上评估的高程图,
[0167]
· 在后光学表面顶点处的局部最大值,
[0168]
· 在距后光学表面的边缘正距离处的外围局部最小值,
[0169]
· 位于所述局部最大值和所述外围局部最小值之间的拐点,
[0170]
和:
[0171]
· 从后光学表面的顶点到外围局部最小值递减,
[0172]
· 从外围局部最小值到该后光学表面的边缘递增。
[0173]
尤其是,在这种情况下,前光学表面和后光学表面的两个高程图具有相似的轮廓。
[0174]
优选地,根据iol的光焦度小于或等于12d的本发明的实施方式:
[0175]-将垂直于光学轴的平面作为零高程参考平面,并将光学轴作为高度评估的参考轴,在前光学表面上的径向坐标上评估的高程图:
[0176]
·
在前光学表面的顶点处呈现局部最大值,
[0177]
·
从前光学表面的顶点到该表面的边缘递减;
[0178]-将垂直于光学轴的平面作为零高程参考平面,并将光学轴作为高程评估的参考轴,在后光学表面的径向坐标上评估的高程图:
[0179]
·
在后光学表面的顶点处呈现局部最大值,
[0180]
·
从后光学表面的顶点到该表面的边缘递减。
[0181]
尤其是,在这种情况下,前光学表面和后光学表面的两个高程图具有相似的轮廓。
[0182]
在前面的三段中描述的前光学表面和后光学表面的这些几何特性归因于这些表面的非球面性,这些表面的非球面性由用于这些表面的(非球面的)方程控制,特别是对于其中前光学表面和后光学表面的小于或等于10阶的非球面系数为非零的本发明的优选实施方式。这些几何特性为iol提供了高光学质量(由高mft描述),并导致edof仅略微依赖于光焦度、孔径和角膜球面像差。
[0183]
根据本发明的一个优选实施方式,前光学表面和后光学表面由折射率在1.40和1.65之间的疏水性生物原材料切割而成。优选地,生物原材料无闪光。闪光(也称为充以流体的微液泡)会在某些iol材料内形成,并且在iol植入后会以各种形状、大小和密度发展。市售的一些iol在植入后会出现闪光,这可能会影响视觉质量。优选地,生物原材料包含uv阻断剂(在严格小于400nm的范围内)和/或黄色发色团,以降低在紫蓝色范围(在400nm和500nm之间)内的潜在地光毒性的光的透过率。优选地,折射率等于1.52。
[0184]
根据本发明的优选实施方式,前光学表面和后光学表面由预定中心厚度的内部主体分开,该中心厚度为沿光学轴测量的,并且介于0.30mm和0.70mm之间。有利地,该中心厚度允许在由内部主体和前光学表面和后光学表面组成的光学器件的外围附接柔性触觉部。
[0185]
根据本发明的优选实施方式,前光学表面和后光学表面都具有垂直于光学轴测量的直径,该直径介于4.70mm和5.00mm之间,优选在4.80mm和4.95mm之间,更优选在4.85mm和4.91mm之间。该直径优选地适用于所谓的透明光学器件。在iol的光学器件(或中心光学部件)的制造过程中,其目标值约为5mm。然而,如下文所述,必须优化iol的触觉部与其光学器件之间的接合部,这将导致透明光学器件的可能缩小,该光学器件在iol制造之后更通常地为约4.85mm。尤其是,前光学表面和后光学表面的几何形状止于由iol光学器件与触觉部的接合部限定的iol光学器件的边缘,称为“这些光学表面的边缘”。
[0186]
根据本发明的实施方式,前光学表面和后光学表面与角膜模型(在iol的前方外部)的组合的光学折射提供了连续且规则的光焦度的图,该图包括中心整体最大值(屈光度)(其可以与更近的距离,例如中距离的视觉相关联),所述中心整体最大值沿着由较低光焦度的延展的(spread)中心区域(对于更远距离视觉,例如,远距离)包围的光学轴。术语“较低”必须相对于中心整体最大值(峰值焦度)来理解。“角膜模型”例如是“平均(average)角膜模型”,即在5.15mm孔径下、在iol平面上给普通的人眼提供0.28μm(
±
0.2μm)角膜球面像差的角膜模型。平均角膜模型是完全标准的,并且是技术人员熟知的。它由iso2表示。优选地,中心区域是“延展的”,即它在前光学表面和后光学表面的大约一半的直径上延展。优选地,该图的点(或是拐点,或是光焦度的局部最小值)的第一环围绕该中心区域。可选地,该图还包括是光焦度的局部最大值的点的第二环,所述第二环围绕所述第一环。下面介绍的图10a-b示出了这种规则的图。这自然地(naturally)产生了由iol提供的edof。指出光焦度的图是规则的是有利的。尤其是,iol同时为患者提供用于不同距离的高的光学质量,而沿着光学器件没有容易引起诸如散射光、光晕或眩光等副作用的光焦度的突然变化。
[0187]
根据本发明的一个更优选的实施方式,根据本发明的人工晶状体包括:
[0188]-中心光学部件(或光学器件),
[0189]
·
该中心光学部件的前表面是前光学表面,及
[0190]
·
该中心光学部件的后表面是后光学表面;
[0191]-多个柔性触觉部,该多个柔性触觉部连接到中心光学部件,且配置为用于将人工晶状体稳定在无晶状体眼的囊袋中。
[0192]
术语“中心”是指光学器件围绕光学轴和/或以光学轴为中心的延伸。术语“中心”优选地不是指iol光学器件的一部分,优选地在于iol光学器件的整个光学部件。优选地,第一表面是前光学表面。
[0193]
优选地,iol包括四个闭合的柔性触觉部,每个触觉部基于中心光学部件形成环形。优选地,沿光学轴测量的触觉部的厚度介于0.20mm和0.50mm之间,更优选地,其等于0.34mm。优选地,触觉部由与中心光学部件相同的疏水性生物原材料制成。优选地,通过铣床切割触觉部。优选地,多个柔性触觉部为四个闭合的柔性触觉部,每个柔性触觉部基于中心光学部件形成环形。这四个闭合的柔性触觉部优选地沿着矩形的对角线、围绕中心光学部件对称地布置,提供四个接触点,使得当iol在无晶状体眼中正常使用时,触觉部和周围眼组织之间的接触角最大化。因此,通过触觉部的径向变形,可以有利地对囊袋尺寸变化进行受控补偿(controlled compensation)。
[0194]
优选地,沿着光学轴测量的、柔性触觉部(前面的)顶端和中心光学部件的主(或中间的)光学平面之间的距离连续且规则地依赖于人工晶状体的光焦度。考虑该距离并将其计算为iol的光焦度的函数是有利且重要的。事实上,如上所述,前光学表面和后光学表面的非球面的几何形状根据iol的光焦度而有规律地变化。这意味着主光学平面不是恒定的,并且其位置作为iol的光焦度的函数而变化。因此,重要的是,还在平行于光学轴的位置(然后产生偏移)以及在主光学平面和触觉部的近端部分之间的角度方面,在触觉部与中心光学部件的连接处,调整触觉部与中心光学部件之间的连接。这与使眼镜腿恰当地适应身体一样重要。有利的是,本发明提出通过上述距离来考虑这一点。此外,也优选地选择触觉部的几何形状和距离以确保当iol植入在无晶状体眼的囊袋中时平行于光学轴的iol稳定性。优选地,它以0.45mm为界,并且随着光焦度的增加而不断增加。基于下文介绍的图12a-b,在具体实施方式中还对作为iol的光焦度的函数的距离进行了补充说明。
[0195]
换句话说,根据本发明的所述非常优选的实施方式的优选实施方式,沿光学轴测量的、柔性触觉部(前面的)顶端和中心光学部件的主(或中间的)光学平面之间的距离通过连续的规则函数对应于人工晶状体的光焦度的图像,从而随着光焦度的增加而连续增加,该距离以0.45mm为界,使得当人工晶状体植入无晶状体眼的囊袋中时,所述主光学平面稳定地平行于光学轴(纵向地)。这个距离和相关的优点都是本发明的一部分。尤其是,本发明还提供了一种人工晶状体(iol),包括:
[0196]-中心光学部件(或光学器件),该中心光学部件包括:
[0197]
·
非球面的前光学表面,和
[0198]
·
非球面的后光学表面;
[0199]-连接到中心光学部件的多个柔性触觉部;
[0200]
其中沿着光学轴测量的、柔性触觉部顶端和中心光学部件的主光学平面之间的距离连续且规则地依赖于iol的光焦度。先前描述的段落[0008]的iol的任一实施方式和/或优点可以扩展到根据本发明的这种其它iol。
[0201]
根据本发明的一个优选实施方式,iol在围绕光学轴旋转180
°
后形状不变。因此更容易在眼中嵌入和操作iol,因为其形状和(尤其是)触觉部的形式在手术时自然地跟随旋
转中的可能的位置调整。
[0202]
本发明还提供了根据本发明的人工晶状体的制造方法,包括以下步骤:
[0203]
(a)对具有非球面的光学表面的剖面构型的光学器件进行建模;
[0204]
(b)计算通过经建模的光学器件传播的光的折射效率分布;
[0205]
(c)根据计算出的折射效率分布选择非球面的光学表面的剖面参数,以获得期望的折射效率;以及
[0206]
(d)将生物原材料形成具有所选参数的经建模的光学器件。
[0207]
根据本发明的制造方法容易地提供具有优化的参数的iol,用于在远距离和中距离改善视觉质量。优选地,在步骤(c)中选择的非球面的光学表面的剖面参数连续且规则地依赖于人工晶状体的光焦度。对于每个表面,这些参数优选地包括(更优选地在于)在表面的顶点处评估的曲率半径和曲线常数,以及非球面系数。根据本发明的iol的实施方式和优点经过必要的修改调整为根据本发明的方法。尤其是,优选地,根据参数表来执行步骤(c),该参数表包括优化的非球面的表面的剖面参数,用于与所述期望的折射效率相关的每个期望的iol的光焦度。根据预定的关系式κ
st
(r
st
)和κ
nd
(r
nd
)非常容易地确定这些参数。优选地且特别地,在步骤(c)中,选择在这些非球面的光学表面中的(该)第一表面的顶点处评估的该第一表面的二次曲线常数κ
st
,通过以下关系式,二次曲线常数κ
st
为在这个顶点处评估的该第一表面的曲率半径r
st
的函数。
[0208][0209]
其中erf表示高斯误差函数,其中a、b、c、a、b、c、d是恒定的实数;并且在步骤(c)选择这些非球面的光学表面中的在第二表面的顶点处评估的(该)第二表面的二次曲线常数κ
nd
,κ
nd
通过以下关系式为在这个顶点处评估的第二表面的曲率半径r
nd
的函数
[0210][0211]
其中f、g、h是恒定的实数。关于这些关系式和/或恒定的实数a、b、c、a、b、c、d、f、g、h的根据本发明的iol的所有实施方式和优点经过必要的修改适用于根据本发明的制造方法的优选实施方式。作为在段落[0053]中描述的用于iol的制造方法的另一个独立的优选实施方式,该方法包括步骤:通过连续且规则的函数选择距离(hc),该距离(hc)为作为光焦度的图像的所述人工晶状体(1)的光焦度的函数,该距离(hc)为沿着光学轴测量的、在柔性触觉部顶端和中心光学部件的主光学平面之间的距离,该距离随着光焦度的增加而连续增加,并且以0.45mm为界,以便在将人工晶状体植入无晶状体眼的囊袋中时,实现平行于光学轴的主光学平面的期望的纵向稳定性。
附图说明
[0212]
在阅读下面的具体实施方式,本发明的其它特征和优点将会显现出来,为了理解具体实施方式,参考附图,其中:
[0213]-图1示出了根据本发明优选实施方式的iol的前表面的简化的平面表示
(representation);
[0214]-图2示出了通过单焦点晶状体的光聚焦与通过根据本发明的iol的光聚焦的简化的比较;
[0215]-图3a-3d示出了根据本发明优选实施方式的iol的前光学表面和后光学表面的截面图;
[0216]-图4示出了非球面的表面的示意图;
[0217]-图5a示出了当曲率半径为正时,根据本发明优选实施方式的第一表面的二次曲线常数的图形表示,该第一表面的二次曲线常数定义为第一表面的曲率半径的函数;
[0218]-图5b示出了当曲率半径为负时,根据本发明优选实施方式的第一表面的二次曲线常数的图形表示,该第一表面的二次曲线常数定义为第一表面的曲率半径的函数;
[0219]-图5c示出了根据本发明的优选实施方式的第二表面的曲线常数的图形表示,该曲线常数定义为第二表面的曲率半径的函数;
[0220]-图6a-c示出了根据本发明的优选实施方式的iol的edof、球面像差和mtf的实验(在光学工作台上)和插值的图形表示,其中iol的edof、球面像差和mtf为它们的标称光焦度的函数;
[0221]-图7示出了对于三种不同的模型角膜球面像差,与孔径结合的、根据本发明优选实施方式的中等屈光度的iol的edof的图形表示;
[0222]-图8示出了对于三种不同的模型角膜球面像差,作为孔径的函数的、根据本发明的优选实施方式的中等屈光的iol的mtf的图形表示;
[0223]-图9a-9c分别示出了对于角膜模型、根据本发明优选实施方式的iol以及这两者的组合,作为孔径的函数的(四阶)球面像差的图形表示;
[0224]-图10a-b示出了通过根据本发明实施方式的前光学表面和后光学表面与角膜模型的结合光学折射获得的光焦度图;
[0225]-图11a-c示出了根据本发明优选实施方式的iol的简化截面表示;
[0226]-图12a示出了根据本发明实施方式的iol的触觉部和的中心光学部件之间的连接;
[0227]-图12b示出了在根据本发明优选实施方式的柔性触觉部顶端和iol中心光学部件的主光学平面之间、沿着光学轴测量的距离的图形表示,该距离是iol的光焦度的函数;
[0228]-图13示出了标准单焦点iol和根据本发明的优选实施方式的iol两者的离焦mtf在光学工作台上的测量值的图形表示。
[0229]
图中的图形未按比例绘制。通常,图中相似的元件用相似的附图标记表示。在本文件的框架内,相同或类似的元件可以具有相同的附图标记。此外,附图中附图标记的存在不能被认为是限制性的,包括当这些标记在权利要求中出现时。
[0230]
尽管如此,以这些图公开每个值或可从这些图形表示导出的值的区间的方式,图示了图形表示的图5a-c、图6a-c、图7、图8和图9a-c被视为如实地再现了测量值和/或插值(或近似)曲线的数。。
具体实施方式
[0231]
此部分给出了本发明具体的优选实施方式。参考附图对这些实施方式进行了描
述,但是本发明不受这些参考附图的限制。具体而言,以下描述的附图或图形仅是示意性的,并不以任何方式进行限制。本具体实施方式将仅涉及本发明的优选实施例,其中第一表面和第二表面分别是前光学表面和后光学表面。然后,为阅读方便,指示符号st和nd分别由指示符号ant和post代替。此外,附图标记2(分别地,3)在具体实施方式和附图中用于表示前(分别地,后)光学表面(其然后对应于第一(依次地,第二)表面)。
[0232]
如下图所示,本发明提供了一种具有扩展的焦深(edof)的折射型人工晶状体(iol)1,其包括单个非球面的前光学表面2和单个非球面的后光学表面3,前光学表面2和后光学表面3相对于光学轴z径向向外地、并且围绕该光学轴z旋转对称地延伸。该光学轴z从前光学表面2指向后光学表面3,或换句话说,从iol 1的整体前表面指向iol 1的整体后表面。附图标记21和31分别表示光学表面2和光学表面3的顶点。
[0233]
如本发明的公开内容所描述的,光学表面2和光学表面3的每个由以下形式的单个方程定义
[0234][0235]
对于更通常由s表示的任意非球面的表面(例如,前光学表面2或后光学表面3),其包括更通常由v表示的顶点,图4示出了如何由这种形式的方程定义这种非球面的表面。该图示出了在顶点v处表面s(然后定义曲线)的截面的密切圆,该密切圆包括光学轴z。具体地,该圆近似于顶点v周围的表面s的截面。该圆的曲率中心c位于光学轴z上。该圆的半径对应于在顶点v处评估的表面s的截面的所谓曲率半径r。在图4示出的实施方式中,假定从顶点v到曲率中心c的位移(矢量)的(沿光学轴z测量的)分量是正的,则该曲率半径r的常规符号是正的。事实上,该位移(矢量)的方向和指向与光学轴z相同。本领域技术人员已知,在顶点v处评估的表面s的截面的二次曲面常数κ定义了表面s的截面与密切圆的整体偏差(例如,双曲线、抛物线或椭圆曲线)。考虑到非球面的表面至少在顶点v的附近局部地、围绕光学轴z旋转地对称,在顶点v处评估的曲率半径r和二次曲线常数κ的这些概念直接扩展到到表面s。具体地,曲率半径r则对应于在顶点v处评估的密切球的半径。对于每个i≥2,α
2i
是表面s的2i级的实系数(所谓的非球面系数)。这些系数基本上对应于由曲率半径r和二次曲线常数κ定义的表面的(侧面)变化。根据所有这些参数r、κ、α4、α6、α8......该方程通过将数据z(r)表示为径向变量r的函数来定义表面s,两者均如图4所示。数据z(r)对应于沿光学轴z测量的、从顶点v到表面的任意点的位移(矢量)的分量,该表面的任意点和光学轴z相距半径r。等效地,数据z(r)对应于矢量的z分量,其中p是在和光学轴z相距半径r的表面s的任一点。考虑表面s上的极坐标局部坐标(r,z),同样等效地,数据z(r)对应于表面s的点沿光学轴z的坐标,该点的径向坐标是r(从顶点v开始计算)。顶点v通常对应于点(r=0;z(r)=0)。在图4所示的实施方式中,因为该位移(矢量)指向与光学轴z相同的方向和指向,数据z(r)是正的。在这种情况下,表面s前凸(后凹)。图4描述为用于非球面的表面的上述方程的非常一般的图示。所要求保护的前光学表面2和后光学表面3的确切形式、它们的凹性或凸性、它们的曲率半径的符号r
ant
和r
post
,或它们的数据z(r)的符号不是限制性的。
[0236]
如图1所示,根据本发明的iol 1包括中心光学部件4(或光学器件),中心光学部件4的前表面包括在前光学表面2上,中心光学部件4的后表面包括在后光学表面3上。iol 1还包括四个闭合的柔性触觉部5(以鼠耳的形式),每个触觉部形成基于中心光学部件4并连接到中心光学部件4的环形。如在本发明的公开内容中所解释的,专门地布置这些触觉部5被,以用于当iol 1处于植入状态时将iol1稳定到无晶状体眼的囊袋中。触觉部5的圆形延伸部52围绕中心光学部件4延伸,用于固定中心光学部件4。垂直于光学轴z测量的中心光学部件4的直径d介于4.70mm和5.00mm之间,优选地为4.85mm。垂直于光学轴z测量的被延伸部52包围的中心光学部件4的直径d’介于5.65mm和6.10mm之间。优选地,如果iol 1的光焦度严格地小于25d,直径d’介于5.90mm和6.10mm之间,更优选地为6.00mm。优选地,如果iol 1的光焦度大于或等于25d,直径d’介于5.65mm和5.85mm之间,更优选为5.75mm。垂直于光学轴z测量的iol 1(包括中心光学部件4、延伸部52和触觉部5)的直径d”介于10.55mm和11.20mm之间。优选地,如果iol 1的光焦度严格小于25d,直径d”介于10.80mm和11.20mm之间,更优选地为11.00mm。优选地,如果iol 1的光焦度大于或等于25d,直径d”介于10.55mm和10.95mm之间,更优选地为10.75mm。有利地,触觉部5的设计调整为iol的光焦度的函数。由触觉部5的低厚度(在0.30mm和0.40mm之间,沿光学轴z测量的)得到的触觉部5的柔性和如图1所示的它们在中心光学部件4周围的位置得到使得它们径向变形,以在iol 1处于植入状态时补偿囊袋尺寸变化。
[0237]
根据本发明的iol 1的前光学表面2和后光学表面3的有利的非球面的几何形状提供了edof。如图2所示,iol 1将光聚焦在“扩展的”焦点上,而标准单焦点iol 1’将光聚焦在单个焦点fp上。单焦点iol 1’为焦点fp周围选定的远距离提供了高质量的视觉,但对远离该焦点fp的近距离和中距离均不提供高质量的视觉。根据本发明的iol 1有利地使得该焦点fp朝向更近的距离(非对称)延伸,以便产生edof,为大范围的中距离和远距离提供整体更好质量的视觉。
[0238]
为了获得edof,根据本发明的iol 1包括均为非球面的前光学表面2和后光学表面3。图3a-d示出了对于四种不同光焦度:10d(在图3a中)、15d(在图3b中)、20d(在图3c中)和35d(在图3d中)的前光学表面2和后光学表面3的截面轮廓(包括光学轴z)。对于这些图中的每一个,轴81和82限定了笛卡尔坐标系,用于限定前光学表面2和后光学表面3的点在示出截面轮廓的平面中的位置。轴81和轴82均以mm为刻度单位。轴81允许测量沿光学轴z的位置。轴82允许测量垂直于光学轴z的位置。轴81和轴82在前表面2的顶点21处相交。由于垂直于光学轴z测量的中心光学部件4的直径d介于4.70mm和5.00mm之间,所以看起来图3a-d中所示出的截面轮廓相比最终真正为iol 1设计和切割的前光学表面2和后光学表面3是更扩展的。
[0239]
从图3a推导出的光学表面2、3限定了凹凸的iol轮廓。前光学表面2是前凹的,而后光学表面3是后凸的。具体地,在前光学表面2和后光学表面3各自的顶点21和31处评估的前光学表面2和后光学表面3的曲率半径r
ant
和r
post
都是负的,并且在前光学表面2和后光学表面3各自的顶点21和31处评估的前光学表面2和后光学表面3的二次曲线常数κ
ant
和κ
post
都是正的。将垂直于光学轴z的平面作为零高程参考平面,并将光学轴z作为高程评估的参考轴,在前光学表面2或后光学表面3的任一个上的径向坐标上评估的高程图:
[0240]
·
在其顶点21或31处呈现局部最大值,
[0241]
·
从光学表面2或3的顶点21或31到其边缘(以最终切割的光学表面2或3为限,其尺寸与直径d相关联)递减。
[0242]
从图3b-d推导出的光学表面2、3限定了双凸iol轮廓。前光学表面2是前凸的,同时后光学表面3是后凸的。在其顶点21处评估的前光学表面2的曲率半径r
ant
是正的,在其顶点31处评估的后光学表面3的曲率半径r
post
是负的,在其顶点21处评估的前光学表面2的二次曲线常数κ
ant
是负的,并且在其顶点31处评估的后光学表面3的二次曲线常数κ
post
是正的。将垂直于光学轴z的平面作为零高程参考平面,并将光学轴z作为高程评估的参考轴,在前光学表面2上的径向坐标上评估的高程图:
[0243]
·
在其顶点21呈现局部最小值,
[0244]
·
从前光学表面2顶点21向其边缘(以最终切割的前光学表面2为限,前光学表面2的尺寸与直径d相关联)递增。
[0245]
将垂直于光学轴z的平面作为零高程参考平面,并将光学轴z作为高程评估的参考轴,在后光学表面3上的径向坐标上评估的高程图,呈现:
[0246]
·
在其顶点31处的局部最大值,
[0247]
·
在距后光学表面3的边缘(以最后切割的后光学表面3为限,后光学表面3尺寸与直径d相关联)正距离处的外围局部最小值32,
[0248]
·
位于局部最大值和外围局部最小值32之间的拐点33,
[0249]
且:
[0250]
·
从其顶点31向外围局部最小值32递减,
[0251]
·
从外围局部最小值32向后光学表面3的边缘递增。
[0252]
考虑到高程图是在后光学表面3上的径向坐标上评估的,在整个后光学表面3的点上(而不是在径向坐标上)它的读数定义(限定)了这样的外围局部最小值32的环和约在中间光学直径处拐点33的环。这种拐点33对应于后光学表面3(如图3b-d所示)从凹到凸或从凸到凹变化的曲率转折点。更具体地,后光学表面3在顶点31的周围是后凸的,在外围局部最小值32的环的周围是后凹的。
[0253]
虽然前光学表面2和后光学表面3明显呈现曲率变化,但必须指出,前光学表面2和后光学表面3均是光滑的、连续且规则的。它们不呈现任何断点或不连贯的区域限制。
[0254]
根据本发明的iol 1的光焦度依赖于折射率(折射率与构成前光学表面2和后光学表面3的材料相关)和这些表面2和3的几何形状。表面2和3的几何形状由曲率半径r
ant
和r
post
以及二次曲线常数κ
ant
和κ
post
确定(至少在顶点21和31周围)。根据本发明的优选实施方式,当且仅当光焦度大于或等于14d时,r
ant
>0,以及对于所有iol的光焦度,r
post
<0。曲率半径r
ant
连续且有规律地取决于区间]0d,13.5d]和[14d,40d[中的每个的光焦度。曲率半径r
post
连续且有规律地取决于光焦度。本发明非常有利地提供了新的平滑、连续和规则的关系式,用于以曲率半径r
ant
和r
post
的函数表示曲线常数κ
ant
和κ
post
。这些通过图5a-c中的图形表示来示出。对于这些图中的每个,轴83和轴84定义了笛卡尔坐标系,分别对应于以mm测量的曲率半径和二次曲线常数的。图5a表示光焦度大于或等于14d的iol 1的前光学表面2的函数κ
ant
(r
ant
)的图形表示,该函数κ
ant
(r
ant
)定义了二次曲线常数κ
ant
为曲率半径r
ant
的函数。图5b表示光焦度严格小于14d的iol 1的前光学表面2的函数κ
ant
(r
ant
)的图形表示,该函数κ
ant
(r
ant
)定义了二次曲线常数κ
ant
为曲率半径r
ant
的函数。图5c表示iol 1的后光学表面3
的函数κ
post
(r
post
),函数κ
post
(r
post
)定义了二次曲线常数κ
post
为曲率半径r
post
的函数。这些图5a-c中的每个既表示与为曲率半径的函数的二次曲线常数的测量值相对应的点的集合(或曲线),又表示非常好的插值和/或该点的集合的近似函数的图形。
[0255]
图5a的图形表示函数
[0256]
κ
ant
(r
ant
)=-40[erf(0.092r
ant-2.29) 1]
[0257]
从图形表示中可以看出,其几乎完全对应于绘制点。此函数在本发明的技术领域中是全新的且非常具体的。它定义了连续且规则的s形(sigmoid),可用于定义作为光焦度大于或等于14d的iol 1的前光学表面2的曲率半径r
ant
的函数的任何适当的曲线常数κ
ant
。
[0258]
图5b的图形表示函数
[0259][0260]
从图形表示中可以看出,其对应于绘制点的完美插值(相关系数等于1)。该函数在本发明的技术领域中是全新的且非常具体的。它定义了一个连续且规则的多项式,该多项式可用于定义作为光焦度严格小于14d的iol1的前光学表面2的曲率半径r
ant
的函数的任何合适的曲线常数κ
ant
。
[0261]
图5c的图形表示函数
[0262][0263]
从图形表示可以看出,其对应于表示(例如)10d和27.5d之间的光焦度的绘制点的几乎完美的插值(相关系数等于0.99)。该函数在本发明的技术领域中是全新的且非常具体的。它定义了一个连续且规则的多项式,该多项式可用于定义作为iol1的后光学表面3的曲率半径r
post
的函数的任何合适的曲线常数κ
post
。
[0264]
本发明不限于上述函数κ
ant
(r
ant
)和κ
post
(r
post
)的参数的特定值。任何类似的s形的或多项式的函数都可以使用,本发明的精神在于使用这些类型的关系式来表示作为前光学表面2和后光学表面3中的每个的曲率半径的函数的二次曲线常数。在本发明的公开内容中,明确地或以适当的区间的形式提供类似的s形的或多项式的函数的例子,其中这些函数的数值系数(如本文件中表示的a、b、c、d、a、b、c、f、g和h)有所不同。这些区间并不限制本公开。此外,可以使用2次多项式函数以外的其他多项式函数。例如,图5b中表示的函数κ
ant
(r
ant
)可以替换为
[0265][0266]
从而提供了图5b中绘制点的另一个非常好的插值。然而,出于计算的原因,优选使用二阶多项式。与前述方程相比,通过减小光焦度为13.5的iol 1的前光学表面的二次曲线常数,图5b中表示的用于光焦度严格小于14d的iol1的前光学表面2的函数κ
ant
(r
ant
)也可以看作非常简单的1阶多项式的形式:
[0267]
κ
ant
(r
ant
)=-3.314r
ant-38.831
[0268]
这可以方便iol 1的制造过程。这样的方程很好地插值了具有较小光焦度(即小于或等于13.5d)的iol 1的前光学表面的一对曲率半径和曲线常数的值,并且由于计算原因非常容易使用。
[0269]
图6a示出了具有误差条(error bar)的点的集合的图形表示,这些点对应于作为iol光焦度的函数的iol 1的edof的实验光学工作台测量值,edof的实验光学工作台测量值在轴86上读取并以屈光度(d)测量iol光焦度在轴85上读取并以屈光度(d)测量。edof定义为在50lp/mm时,从mtf的最大峰值到0.17的mtf值的焦度增加。测量孔径为3mm,角膜模型提供0μm球面像差(iso1)。该图形表示由具有以下方程的多项式曲线插值
[0270]
edof=-0.00002x3 0.0004x2 0.0288x 0.3104
[0271]
其中x是iol的光焦度。从图6a可以看出,本发明提供了一种iol 1,该iol 1的edof以非常受限的方式依赖于iol的光焦度。
[0272]
图6b示出了具有误差条的点的集合的图形表示,这些点对应于作为iol光焦度的函数的iol 1的四阶纵向球面像差(lsa)的实验光学工作台测量值,iol1的四阶纵向球面像差的实验光学工作台测量值在轴87上读取并且以微米(μm)测量,ol光焦度在轴85上读取并且以屈光度(d)测量。在50lp/mm和4mm孔径下测量sa。该图形表示由具有以下方程的多项式曲线插值
[0273]
sa=-0.00002x3 0.0008x
2-0.0025x 0.1982
[0274]
其中x是iol的光焦度。从图6b可以看出,本发明提供了一种iol 1,该iol 1的sa以非常受限的方式依赖于该iol的光焦度。随着光焦度的降低,发现sa略有降低。事实上,低焦度的iol实际上更平坦,更难制成非球面的。edof值和sa值遵循相同的趋势,它们具有很强的相关性。
[0275]
图6c示出了具有误差条的点的集合的图形表示,这些点对应于作为iol光焦度的函数的iol 1的mtf的实验光学工作台测量值,iol 1的mtf的实验光学工作台测量值在轴88上读取并在50cy/mm下评估,iol的光焦度在轴85上读取并以屈光度(d)测量。在存在提供0.28μm球面像差(iso2)的角膜模型的情况下,在50lp/mm和3mm孔径下测量mtf。这种图形表示可以(非常弱地)用具有以下方程的多项式曲线插值
[0276]
mtf=0.0006x
2-0.0222x 0.6994
[0277]
其中x是iol的光焦度。从图6c可以看出,本发明提供了一种iol 1,该iol 1的mtf以非常受限限的方式依赖于iol的光焦度。
[0278]
图7示出了作为孔径(这里是瞳孔直径)的函数的根据本发明的iol 1的edof的平均实验光学工作台测量值的三个图形表示,iol 1的edof的平均实验光学工作台测量值在轴86上读取并且以屈光度(d)测量,孔径在轴89上读取并且以毫米(mm)测量。edof定义为在50lp/mm时,从mtf的最大峰值到0.17的mtf值以屈光度增加的焦度。计算各光焦度10d、15d、20d、25d、30d和35d的一个iol1的测量值的平均值。三种图形表示对应于使用提供三种不同角膜球面像差的三种不同角膜模型:
[0279]-提供0.00μm角膜球面像差的角膜模型(对应于附图标记71或iso1),-提供0.13μm(
±
0.2μm)角膜球面像差(在5.15mm孔径和iol平面)的角膜模型(对应于附图标记72),
[0280]-提供0.28μm(
±
0.2μm)角膜球面像差(在5.15mm孔径和iol平面)的角膜模型(对应于附图标记73或iso2)。
[0281]
这些图形表示清楚地表明,iol 1的edof以有限的方式依赖于孔径和角膜球面像差。此外,对于现有技术中已知的经典单焦点iol,在瞳孔扩张之后,针孔效应的加宽迅速减小,由此产生的edof也是如此。对于根据本发明的iol1,这种趋势从根本上是不同的,因为
尽管瞳孔直径扩大,edof仍然相对较高,并且这对于上述三种角膜模型中的任何一种都是如此。
[0282]
图8示出了作为孔径(这里是瞳孔直径)的函数的根据本发明的iol 1的mtf的平均实验光学工作台的测量值的三个图形表示,该mtf的平均实验光学工作台的测量值在轴88上读取,,该孔径在轴89上读取并且以毫米(mm)测量。在50lp/mm时测量mtf。计算各光焦度10d、15d、20d、25d、30d和35d的一个iol 1的测量值的平均值。这三种图形表示对应于上述三种不同角膜模型(对应于附图标记71、72和73)的使用。这些图形表示表明,iol 1的mtf以受限的方式上依赖于孔径和角膜球面像差。
[0283]
图13示出了在中间范围的(远)光焦度(约20d)中,两个iol的离焦mtf曲线(分别对应于曲线7a和7b)的图形表示,该mtf在轴88上读取,并作为在轴85上读取并且以屈光度(d)测量的iol的光焦度的函数。在50lp/mm和3mm孔径下,在配有提供0.00μm球面像差(iso1)的角膜模型的光学工作台上测量mtf。这些曲线7a和7b分别对应于标准单焦点iol和iol1的mtf测量值。根据本发明的iol 1的拉长的焦点在图13中可见。在根据本发明的iol 1的情况下,清楚地显示了不对称的mtf峰值,其具有朝向更高焦度(更近的距离)的拉长的焦点,而标准单焦点晶状体的mtf峰值相对于最佳焦点处的焦度基本对称,该焦点被分配到远距离。如在光学工作台上所证明的,这些差异说明根据本发明的iol 1在中距离处优越的edof和更好的临床视觉敏锐度。
[0284]
图9a-c中的各图示出了作为孔径(是瞳孔直径)的函数的四级球面像差(以下由sa表示)的实验光学工作台的测量值的图形表示,该测量值在轴90上读取且以微米(μm)测量,孔径在轴89上读取并以毫米(mm)测量。对于这些图中的每个,以50lp/mm测量sa,用于:
[0285]-单独考虑的三个上述角膜模型中的一个(对应于附图标记74)
[0286]-单独考虑的根据本发明的iol 1(对应于附图标记75)
[0287]-与所述iol 1组合的所述具体的角膜模型(对应于附图标记76)
[0288]
图9a、9b和9c中考虑的角膜模型分别是:
[0289]-提供0.28μm(
±
0.2μm)角膜球面像差的角膜模型(5.15mm的孔径,iol平面),
[0290]-提供0.13μm(
±
0.2μm)角膜球面像差的角膜模型(孔径为5.15mm,iol平面),和
[0291]-提供0.00μm角膜球面像差的角膜模型。
[0292]
相对于传统的已知单焦点iol,iol 1的不同之处在于其单独提供的sa的量。iol 1的sa为负,并且随着孔径迅速减小。与传统的已知单焦点iol的sa相比,iol 1的sa更负。因此,由任何角膜模型和iol 1的组合产生的sa基本上由该iol 1的sa决定,因为iol 1的sa过度补偿了任何角膜模型的(小的)正的sa。残余sa然后有利地仅非常轻微地受角膜模型的选择的影响。
[0293]
在根据本发明的iol 1存在edof之后,前光学表面2和后光学表面3与平均角膜模型(优选地,如[0049]段中所定义的)(相对于iol 1布置在光学轴z的前面)的组合光学折射提供了连续且规则的光焦度的图9,该图9包括沿着光学轴z的中心整体最大值91,该中心整体最大值91被较低光焦度的延展的中心区域92(对应于edof)围绕。在以光学轴z为中心且直径为4mm的(读取)窗口内,图10a和10b中分别示出了iol光焦度为35d和20d的该图9。回想一下,所述iol光焦度被定义为在以光学轴为中心,直径为3mm的(读取)窗口内未经校正而测得的平均光焦度(该光焦度由图9表示)。中心区域92在前光学表面2和后光学表面3的直
径d的大约一半上延展,并且被图9的点(这些点是拐点(在图10a的情况下)或是光焦度的局部最小值(在图10b的情况下)的第一环93、93’包围。该第一环93、93’在这两种情况下都对应于光焦度径向变化的趋势。图10b更真实地示出了大约20d的光焦度的这种一般的图9。在这种情况下,图9还包括:
[0294]-围绕延展的中心区域92的光焦度的局部最小值的所述第一环93,以及
[0295]-围绕第一环93的光焦度的局部最大值的第二环94。
[0296]
更一般地,根据本发明的一些实施方式的iol 1包括具有逐渐交替变化的最大和最小光焦度的环(例如环93和94)的集合。必须指出的是,任何iol光焦度的图9都非常平滑,连续且规则。它不以固定的光焦度划分为分区。
[0297]
在图11a(对于等于10d的光焦度)、图11b(对于等于24d的光焦度)和图11c(对于等于35d的光焦度)中另外示出了根据本发明优选实施方式的iol 1的截面表示。这些iol 1的截面是沿着包括光学轴z的平面制成的。在这些图11a-c中可以看到上述的前光学表面2和后光学表面3的几何形状以及凹性或凸性。这些前光学表面2和后光学表面3被由生物原材料制成的中心光学部件4的内部主体41分隔开。内部主体41具有预定的且沿着光学轴z测量的中心厚度e,该厚度e介于0.3mm和0.7mm之间且有规律地依赖于iol的光焦度,使得提供介于0.2mm和0.3mm之间(优选地为大约0.25mm)的iol外围厚度,用于将柔性触觉部5连接到中心光学部件4。
[0298]
如图12a所示,iol 1的中心光学部件4优选地具有主光学平面(m),该主光学平面与柔性触觉界面(5)顶端(51)以沿光学轴(z)测量的预定的距离(hc)分开,该预定的距离(hc)介于0.00mm和0.45mm之间。该距离(hc)通过函数连续且规则地依赖于iol 1的光焦度,该函数的图被表示在图12b中。在轴62上读取以毫米(mm)测量的距离(hc),该距离作为在轴61上读取且以屈光度(d)测量的光焦度的函数。随着光焦度的增加,该函数连续增加,其图形呈现s形轮廓。鉴于前光学表面2和后光学表面3的几何形状,有利地计算该距离(hc),以保证当将iol 1植入眼中时,iol 1的主光学平面相对于光学轴z的纵向稳定的(不随iol的光焦度变化)位置。
[0299]
换句话说,本发明涉及一种具有扩展的焦深的人工晶状体1,包括非球面的前光学表面2和后光学表面3。在本发明的框架内描述了这些光学表面2和光学表面3的具体的非球面的几何形状。
[0300]
针对具体实施方式描述了本发明,这些实施方式具有仅仅是说明性的价值,不应被认为是限制性的。本领域技术人员会注意到,本发明不限于上面这里示出和/或描述的例子。本发明包括在本文件中描述的新技术特征的每个以及它们的组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。