技术特征:
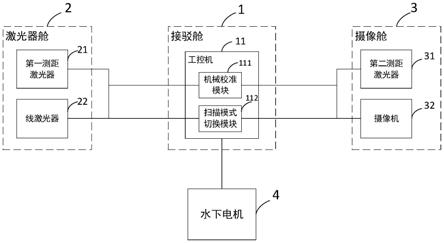
1.一种水下激光扫描设备,其特征在于,包括:接驳舱,所述接驳舱中安装有工控机;激光器舱,连接于所述接驳舱,所述激光器舱中安装有第一测距激光器和线激光器;摄像舱,连接于所述接驳舱,所述摄像舱中安装有第二测距激光器和摄像机;所述工控机根据所述第一测距激光器和所述第二测距激光器基于一辅助板的激光测距数据,并根据所述第一测距激光器和所述第二测距激光器在所述辅助板上的激光点之间的距离,计算得到所述激光器舱的舱体偏转角度、所述激光器舱和所述摄像舱的舱间距离,并根据所述舱体偏转角度和所述舱间距离完成所述水下激光扫描设备的机械参数自校准。2.根据权利要求1所述的水下激光扫描设备,其特征在于,所述辅助板为标定板,所述标定板完整放置于所述摄像机的视野中,并与所述摄像舱的中轴线以垂直方向放置。3.根据权利要求2所述的水下激光扫描设备,其特征在于,放置所述标定板时,使所述第一测距激光器和所述第二测距激光器的激光点位于所述标定板的角点处。4.根据权利要求3所述的水下激光扫描设备,其特征在于,通过所述摄像机获取所述标定板的图像,并对所述标定板的图像进行图像角点识别,在所述图像上对所述角点进行第一颜色的标记,进一步计算获取所述激光点在所述图像中的位置。5.根据权利要求4所述的水下激光扫描设备,其特征在于,所述第一颜色为rgb色彩模式下红色、绿色、蓝色中其中一种;将所述图像进行颜色通道的过滤,将对应所述第一颜色的图像通道中低于一阈值的数据全部置零,留存下非零像素数据,再将剩余数据进行逐行扫描,计算出所述图像通道数值最大的两个像素的位置,进一步计算获取所述激光点在所述图像中的位置。6.根据权利要求5所述的水下激光扫描设备,其特征在于,将所有所述角点的坐标和两个所述激光点的像素坐标进行比对,根据现实中所述角点的尺寸和间隔,计算得到现实情况下两个所述激光点的距离;再根据所述第一测距激光器和所述第二测距激光器的所述激光测距数据,通过空间三角算法得到所述舱间距离以及所述激光器舱与水平面的夹角,完成所述机械参数自校准。7.根据权利要求1-6任一项所述的水下激光扫描设备,其特征在于,启动所述线激光器,进一步获取所述线激光器发射的线激光的像素位置,并获取完成所述机械参数自校准后的所述水下激光扫描设备的姿态数据,所述工控机根据所述线激光的像素位置和所述水下激光扫描设备的姿态数据控制所述水下激光扫描设备进行扫描模式的切换。8.根据权利要求7所述的水下激光扫描设备,其特征在于,通过所述摄像机获取包含所述线激光的扫描图像,对所述扫描图像进行灰度二值化处理,根据处理后的所述扫描图像获取所述线激光的像素位置。9.根据权利要求7所述的水下激光扫描设备,其特征在于,所述扫描模式包括单独静态旋转扫描模式、单独动态扫描模式、同时进行动静态扫描模式中任意一种。10.根据权利要求1所述的水下激光扫描设备,其特征在于,所述激光器舱和所述摄像舱上均安装有接插件,所述激光器舱和所述摄像舱通过所述接插件连接于所述接驳舱。
技术总结
本发明提出一种水下激光扫描设备,包括:接驳舱,接驳舱中安装有工控机;激光器舱,连接于接驳舱,激光器舱中安装有第一测距激光器和线激光器;摄像舱,连接于接驳舱,摄像舱中安装有第二测距激光器和摄像机;工控机根据第一测距激光器和第二测距激光器基于一辅助板的激光测距数据,并根据第一测距激光器和第二测距激光器在辅助板上的激光点之间的距离,计算得到激光器舱的舱体偏转角度、激光器舱和摄像舱的舱间距离,并根据舱体偏转角度和舱间距离完成水下激光扫描设备的机械参数自校准。本发明解决了现有水下激光扫描设备机械兼容性差以及无法进行工作模式切换的问题。及无法进行工作模式切换的问题。及无法进行工作模式切换的问题。
技术研发人员:卢泽宇 郭金家 张成伦 李萌
受保护的技术使用者:青岛图海纬度科技有限公司
技术研发日:2021.12.09
技术公布日:2022/3/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。