1.本发明实施例涉及光学检测设备技术领域,尤其涉及一种晶圆背检设备及其检测方法。
背景技术:
2.图1是现有技术中一种晶圆背检设备的俯视图。图2是现有技术中一种晶圆背检设备的侧视图。如图1和2所示,该晶圆背检设备包括光机本体1、物镜2、暗场光源3、反射镜4、对焦系统5和明场光源6,其中,晶圆7通过三个气爪8固定,并通过转盘10转动。转盘10对晶圆7进行旋转,以检测整个晶圆7背面;反射镜4和相机11组成检测组件9,检测组件9随着光机本体1沿径向方向移动。通过移动反射镜4的位置调整相机11的光程,实现追焦;通过径向移动整个检测组件9,对晶圆7进行检测。其中,对焦系统5和相机11共径,共径方向与光机本体1步进方向平行。明场光源6和暗场光源3提供照明,用于识别不同类型的晶圆背部缺陷;对焦系统5(focus system,fs)的光斑很小,对光斑中心高度进行采样和计算。
3.其中,图3是现有技术中对焦系统和相机检测晶圆的示意图。如图3所示,对焦系统5中心与相机11中心间距43.5mm,相机11aoi(area ofimage,图像区域)为9mm*7mm,晶圆7为8英寸,相机11焦深180um,晶圆7表面偏离最佳焦平面不得超过60um。检测流程是:对焦系统5首先进入晶圆7最外一环图像区域,检测晶圆7边缘的面型;然后对焦系统5依次步进到第2~5环,获取面型;对焦系统步进到第6环,相机11才开始采集晶圆7背面图像,并根据面型数据调整焦距;对焦系统5逐次步进到最内一块图像区域,获取中心的焦距,此时相机11仍然在检测晶圆7中间的圆环;继续步进6环后,相机11步入晶圆中心,采图并计算;检测结束。
4.上述设备的缺陷在于:对焦系统前5圈扫面型期间,即便系统已经获得了1~5圈的面型,相机11仍然无法进行检测,处于闲置状态,必须等待进入最外圈图像区域。由于空间和结构的限制,对焦系统又无法离物镜2中心更近。这样使得检测过程时间较长,效率较低。
技术实现要素:
5.本发明提供一种晶圆背检设备及其检测方法,以在保证背检精度的前提下大幅度提高检测产率。
6.为实现上述目的,本发明一方面实施例提出了一种晶圆背检设备,包括:光机本体、以及设置在所述光机本体上的光源、光学系统、对焦系统和相机,所述光源用于出射探测光束至被测晶圆,经所述被测晶圆反射或散射的光束通过所述光学系统至所述相机;所述对焦系统用于测量所述被测晶圆表面的面型数据,所述相机用于根据所述面型数据调整所述光学系统,以调整所述反射或散射光束至所述相机焦面的光程;
7.所述被测晶圆包括n环硅片,第一初始位置比第二初始位置超前m环,s≤m《t,所述第一初始位置为所述对焦系统出射的光斑中心投射到所述被测晶圆的初始位置;所述第二初始位置为所述相机的视场中心投射到所述被测晶圆的初始位置;其中,n为正整数,且n大于或等于2,s大于或等于0,t为所述光斑中心和所述视场中心共径时,所述第一初始位置比
所述第二初始位置的超前环数。
8.根据本发明的一个实施例,所述第一初始位置与所述第二初始位置处于所述被测晶圆的不同径向方向上,所述相机的步进轨迹与所述对焦系统的步进轨迹平行,所述相机的步进轨迹沿所述被测晶圆的任意径向方向。
9.根据本发明的一个实施例,以所述被测晶圆的圆心为原点,以所述原点指向所述第二初始位置的方向为x轴,以垂直于x轴的径向方向为y轴,建立直角坐标系,所述第一初始位置与所述第二初始位置之间的位置关系满足:
[0010][0011][0012]
其中,(x1,y1)为第一初始位置的坐标,r为所述被测晶圆的半径,d1为所述第一初始位置和所述第二初始位置之间的直线距离,
△
step为所述对焦系统的步进间距,所述步进间距等于所述被测晶圆上沿x轴方向相邻环之间的间距,k为所述第一初始位置和所述第二初始位置之间沿所述x轴方向相差的环数个数。
[0013]
根据本发明的一个实施例,k=1。
[0014]
为实现上述目的,本发明另一方面实施例提出了一种晶圆背检设备的检测方法,基于如前所述的晶圆背检设备实现,所述检测方法包括以下步骤:
[0015]
所述被测晶圆包括n环硅片,所述相机沿所述被测晶圆的任意一径向方向步进,同时所述对焦系统沿平行于所述径向方向的方向步进;
[0016]
所述对焦系统测量所述被测晶圆表面的面型数据;
[0017]
所述相机根据所述面型数据调整所述光学系统中反射镜的位置,以使得所述晶圆表面始终处于所述相机的焦深中;
[0018]
其中,所述第一初始位置比所述第二初始位置超前m环,s≤m《t,所述第一初始位置为所述对焦系统出射的光斑中心投射到所述被测晶圆的初始位置;所述第二初始位置为所述相机的视场中心投射到所述被测晶圆的初始位置;n为正整数,且n大于或等于2,s大于或等于0,t为所述光斑中心和所述视场中心共径时,所述第一初始位置比所述第二初始位置的超前环数。
[0019]
根据本发明的一个实施例,所述相机的步进方向和所述对焦系统的步进方向处于所述被测晶圆的不同径向方向上。
[0020]
根据本发明的一个实施例,以所述被测晶圆的圆心为圆心,以所述第一初始位置至所述相机步进的径向方向的垂直距离为半径的圆形区域,为所述被测晶圆的检测盲区;
[0021]
所述相机根据所述面型数据调整所述光学系统中反射镜的位置包括:
[0022]
当所述相机步进至所述检测盲区后,在已有的面型数据中,以所述对焦系统测量的与所述检测盲区相邻的环的面型数据调整所述反射镜的位置。
[0023]
根据本发明的一个实施例,所述相机根据所述面型数据调整所述光学系统中反射镜的位置包括:
[0024]
当所述相机步进至所述检测盲区后,在已有的面型数据中,以所述对焦系统的光斑中心与所述被测晶圆的圆心距离最近时,所述对焦系统测量的所述被测晶圆的面型数据
调整所述反射镜的位置。
[0025]
根据本发明的一个实施例,所述相机根据所述面型数据调整所述光学系统中反射镜的位置包括:
[0026]
当所述对焦系统的光斑中心落后所述相机的视场中心至少一环时,在已有的面型数据中,以所述对焦系统的光斑中心落后于所述相机的视场中心最近一环的面型数据调整所述反射镜的位置。
[0027]
根据本发明的一个实施例,所述相机根据所述面型数据调整所述光学系统中反射镜的位置包括:
[0028]
当所述对焦系统的光斑中心落后所述相机的视场中心至少一环时,在已有的面型数据中,以所述对焦系统的光斑中心最靠近所述被测晶圆中心时,所述对焦系统测量的所述被测晶圆的面型数据调整所述反射镜。
[0029]
根据本发明的一个实施例,所述相机根据所述面型数据调整所述光学系统中反射镜的位置包括:
[0030]
当所述对焦系统的光斑中心落后所述相机的视场中心至少一环时,基于已有的面型数据,进行高阶拟合,获取所述相机的视场中心处于的当前所述被测晶圆的硅片环的面型数据,以调整所述反射镜。
[0031]
根据本发明的一个实施例,所述相机根据所述面型数据调整所述光学系统中反射镜的位置包括:
[0032]
当所述对焦系统的光斑中心落后所述相机的视场中心至少一环时,基于已有的面型数据和力学模型,获取所述相机的视场中心处于的当前所述被测晶圆的硅片环的面型数据,以调整所述反射镜。
[0033]
本发明实施例提出的晶圆背检设备及其检测方法,其中,背检设备包括:光机本体、以及设置在光机本体上的光源、光学系统、对焦系统和相机,光源用于出射探测光束至被测晶圆,经被测晶圆反射或散射的光束通过光学系统至相机;对焦系统用于测量被测晶圆表面的面型数据,相机用于根据面型数据调整光学系统,以调整反射或散射光束至相机焦面的光程;其中,被测晶圆包括n环硅片,第一初始位置比第二初始位置超前m环,s≤m《t环,第一初始位置为对焦系统出射的光斑中心投射到被测晶圆的初始位置;第二初始位置为相机的视场中心投射到被测晶圆的初始位置;其中,n为正整数,且n大于或等于2,s大于或等于0,t为光斑中心和视场中心共径时,第一初始位置比第二初始位置的超前环数。通过改进对焦系统的光斑中心的初始位置,和相机的视场中心的初始位置,使得相机的视场中心的初始位置相较于对焦系统的光斑中心的初始位置落后的环数少于现有技术中的落后环数,进而提高检测产率。
附图说明
[0034]
图1是现有技术中一种晶圆背检设备的俯视图;
[0035]
图2是现有技术中一种晶圆背检设备的侧视图;
[0036]
图3是现有技术中对焦系统和相机检测晶圆的示意图;
[0037]
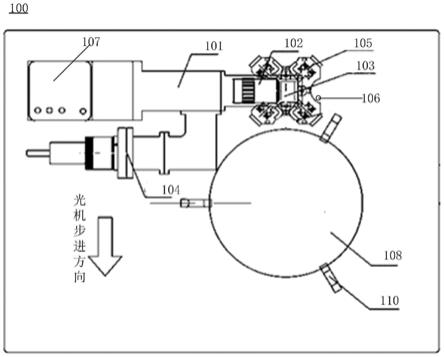
图4是本发明实施例提出的晶圆背检设备的结构示意图;
[0038]
图5是本发明实施例提出的晶圆背检设备中对焦系统和相机检测晶圆的示意图;
[0039]
图6是本发明实施例提出的晶圆背检设备中对焦系统和相机检测晶圆时的光斑中心和视场中心的初始位置示意图;
[0040]
图7是本发明实施例提出的晶圆背检设备检测过程中对焦系统的光斑中心距离晶圆圆心的距离随步进步数的变化图;
[0041]
图8是本发明实施例提出的晶圆背检设备检测过程中对焦系统的光斑中心的步进轨迹示意图;
[0042]
图9是本发明实施例提出的晶圆背检设备中被测晶圆简化示意图;
[0043]
图10是图9中被测晶圆的挠度随着半径的变化而变化的曲线图;
[0044]
图11是本发明实施例提出的晶圆背检设备中第一种被测晶圆的形变梯度图像;
[0045]
图12是本发明实施例提出的晶圆背检设备中第二种被测晶圆的形变梯度图像;
[0046]
图13是本发明实施例提出的晶圆背检设备中第三种被测晶圆的形变梯度图像;
[0047]
图14是本发明实施例提出的晶圆背检设备中第四种被测晶圆的形变梯度图像;
[0048]
图15是本发明实施例提出的晶圆背检设备的检测方法流程图;
[0049]
图16是本发明一个具体实施例提出的晶圆背检设备的检测方法流程图。
具体实施方式
[0050]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0051]
图4是本发明实施例提出的晶圆背检设备的结构示意图。结合图4至图5所示,该晶圆背检设备100包括:光机本体101、以及设置在光机本体101上的光学系统(物镜102、反射镜103)、光源(明场光源104、暗场光源105)、对焦系统106和相机107,明场光源104和暗场光源105用于出射探测光束至旋转的被测晶圆108,经被测晶圆108反射或散射的光束依次通过反射镜103、物镜102至相机107;对焦系统106用于测量被测晶圆108表面的面型数据,相机107用于根据面型数据调整反射镜103的位置,以调整反射或散射光束至相机107焦面的光程;
[0052]
被测晶圆108包括n环硅片109,第一初始位置a比第二初始位置b超前m环,s≤m《t环,第一初始位置a为对焦系统106出射的光斑中心投射到被测晶圆108的初始位置;第二初始位置b为相机107的视场中心投射到被测晶圆108的初始位置;其中,n为正整数,且n大于或等于2,s大于或等于0,t为光斑中心和视场中心共径时,第一初始位置a比第二初始位置b的超前环数。
[0053]
需要说明的是,被测晶圆108通过气爪110固定,被测晶圆108包括n环硅片109,举例n为14,那么被测晶圆108的最外圈为第一环硅片,被测晶圆108的中心为第十四环硅片。现有技术中,如图3所示,对焦系统106的光斑中心的初始位置a’在第一环硅片上,相机107的视场中心的初始位置b’落后于对焦系统106的光斑中心的初始位置5环,并且对焦系统106的光斑中心和相机107的视场中心均处于同一径向方向上,这样,当对焦系统106的光斑中心沿步进方向(自对焦系统106的光斑中心的初始位置a’沿径向指向被测晶圆7的中心的方向上运动,)前进五步,即走过五环后,相机107的视场中心才能到达被测晶圆108的第一环硅片上,进而使得检测时间长,检测效率低。该问题的实质在于对焦系统106本身的物理
尺寸以及反射镜103、暗场光源105的物理尺寸,以及相机107的视场实际尺寸问题,目前,在工件安装过程中,相机107的视场中心的初始位置落后于对焦系统106的光斑中心的初始位置5环,其实已经是相机107的视场中心的初始位置离对焦系统106的光斑中心的初始位置最近的距离。
[0054]
由此,本发明实施例提出了一种晶圆背检设备,在不改变光机本体101本身的基础上,仅调整对焦系统106本身的位置,使得对焦系统106的光斑中心的初始位置与相机107的视场中心的初始位置相差环数少于5环。其中,t即为5,s大于等于0,进而,第一初始位置a比第二初始位置b超前s-t环,即为第一初始位置a比第二初始位置b超前0-5环中的一个数字,比如为1、2、3、4,这样使得对焦系统106在步进1、或2、或3、或4环后,相机107的视场中心就可以进入被测晶圆108的最外圈,即相较于现有技术中的对焦系统106和相机107之间的相差环数变少,从而晶圆背检设备100的检测效率得到提高。
[0055]
根据本发明的一个优选的实施例,第一初始位置a比第二初始位置b超前1环。
[0056]
可以理解的是,第一初始位置a比第二初始位置b超前1环,那么在对焦系统106采集到被测晶圆108的最外圈的面型数据后,对焦系统106和相机107同时随光机本体101步进,在步进一环之后,相机107的视场中心就可以到达被测晶圆108的最外圈,从而,相机107根据对焦系统106采集到的被测晶圆108的最外圈的面型数据调整反射镜103的位置,以调整反射或散射光束到达相机107的光程,以使得被测晶圆108的最外圈的晶面均处于相机107的焦深范围内,利于相机107获取被测晶圆108的最外圈的晶面的图像。
[0057]
需要说明的是,在对焦系统106获取被测晶圆108最外圈硅片环中的其中一个硅片的面型数据后,由于被测晶圆108一直在转动,进而,相机107可以根据对焦系统106采集到的被测晶圆108的最外圈中一个硅片的面型数据调整反射镜103的位置,最终获取整个最外圈的图像。其中,相机107可以是ccd或者cmos相机。接着光机本体101步进一步,相机107到达次外圈,即第二环,那么相机107可以根据对焦系统106在上一步中采集到的被测晶圆108的第二环中一个硅片的面型数据调整反射镜103的位置,最终获取整个第二环的图像。依次类推,相机107可以获取整个晶圆的图像,以完成对被测晶圆的检测。
[0058]
下面以第一初始位置a比第二初始位置b超前1环来对第一初始位置a的布置的进行说明。
[0059]
根据本发明的一个实施例,如图5所示,第一初始位置a与第二初始位置b处于被测晶圆108的不同径向方向上,相机107的步进轨迹与对焦系统106的步进轨迹平行,相机107的步进轨迹沿被测晶圆108的任意径向方向。
[0060]
根据本发明的一个实施例,如图6所示,以被测晶圆108的圆心为原点,以原点指向第二初始位置b的方向为x轴,以垂直于x轴的径向方向为y轴,建立直角坐标系,第一初始位置a与第二初始位置b之间的位置关系满足:
[0061][0062][0063]
其中,(x1,y1)为第一初始位置的坐标,r为被测晶圆108的半径,d1为第一初始位置a和第二初始位置b之间的直线距离,
△
step为对焦系统106的步进间距,步进间距等于被测
晶圆108上沿x轴方向相邻硅片环之间的间距,k为第一初始位置a和第二初始位置b之间沿x轴方向相差的环数个数,优选地,k=1。
[0064]
可以理解的是,结合图5和图6所示,以被测晶圆108的圆心为原点o,以原点o指向第二初始位置b的方向为x轴,建立直角坐标系。比如,相机107沿x轴负向步进,对焦系统106的步进方向与相机107的步进方向平行,但不共径,以8英寸晶圆,相机视场范围为9mm*7mm,光斑中心与视场中心间距48.3mm(一般由机械结构的尺寸而定)为例。光斑中心与视场中心间距d1=48.3mm,步进距离
△
step=8.7mm,晶圆半径r=100mm。
[0065]
第一初始位置a和第二初始位置b的相对位置关系满足:
[0066][0067]
其中,x1的计算过程如下:
[0068]
首先,x1和y1满足圆的方程,即x
12
y
12
=r2;
[0069]
其次,向量的模满足:
[0070]
结合x1和y1满足的两个方程,可以得出:
[0071][0072][0073]
由此,获得了第一初始位置a的坐标,以及第一初始位置a和第二初始位置b之间的相对位置关系。在提前获知第二初始位置b,以及光机本体101的机械安装参数后,可以获知d1的值,并且,当被测晶圆108尺寸固定后,可以获取r值,以及
△
step值,进而可以获取第一初始位置a的坐标,给对焦系统106的安装提供依据。
[0074]
需要说明的是,k值优选为1,也就是对焦系统106的光斑中心的初始位置和相机107的视场中心的初始位置相差一环。可提升晶圆背检设备100的检测效率。
[0075]
当对焦系统106的光斑中心的初始位置和相机107的视场中心的初始位置相差两环或者三环或者四环时,d1一定,对焦系统106的光斑中心的初始位置会沿y轴负向移动,此时会使得对焦系统106步进至被测晶圆108的中心过程中,对焦系统106可以略过较多的被测晶圆108的环数;但检测效率较低,并且可能受机械结构空间限制,对焦系统106可能不能实现相差三环或者四环的方案。
[0076]
当对焦系统106的光斑中心的初始位置和相机107的视场中心的初始位置相差0.1环、0.2环等时,d1一定,对焦系统106的光斑中心的初始位置会沿y轴正向移动,此时会使得对焦系统106步进至被测晶圆108的中心过程中,对焦系统106会略过较少的被测晶圆108的环数;也就是有可能大部分的被测晶圆108上的硅片环不能对焦系统106检测到。
[0077]
由此,选择k=1作为对焦系统106的光斑中心的初始位置和相机107的视场中心的初始位置的差值。
[0078]
而当对焦系统106的光斑中心的初始位置和相机107的视场中心的初始位置相差一环时,不同步进步数1~15下,对焦系统106的光斑中心和被测晶圆108圆心的位置关系如图6所示,当相机107还在被测晶圆108外的时候,对焦系统106首先进入被测晶圆108最外环,并获取面型数据;紧接着,相机107进入最外环,开始采集图像并计算,同时对焦系统106
进入第2环,但是相机107的视场中心距离圆心的距离减去对焦系统106的光斑中心距离圆心的距离在逐渐缩小,即对焦系统106超前相机107的幅度缩小(如图7所示);继续步进,对焦系统106的光斑中心逐渐与相机107落在同一环;随着不断步进,对焦系统106的光斑中心开始落后于相机107;在被测晶圆108圆心附近,对焦系统106的光斑中心开始大幅度落后于相机107,且对焦系统106无法覆盖最内的多个圆环(以下简称“对焦系统106检测盲区”(如图5中由圆心沿径向向外五环内均属于检测盲区))。
[0079]
需要说明的是,对焦系统106逐渐落后于相机107,是因为对焦系统106和相机107在各种半径上的投影角度不同。如图8所示,虽然对焦系统106沿着x向的速度与相机107相同,但是对焦系统106的速度在径向上的投影比相机107在径向的投影小,且随着逐渐向圆心移动,对焦系统106的速度与直径的夹角增大,对焦系统106速度沿着直径的投影与相机107的速度差距逐渐扩大。
[0080]
也就是说,沿x方向,对焦系统106与相机107的速度相同,但是比如在第一点c点时,对焦系统106的速度为v
x0
,沿径向方向的速度分量为v
r0
,在第二点d点时,对焦系统106的速度为v
x1
,沿径向方向的速度分量为v
r1
,其中,v
r1
大于v
r0
,进而径向速度的分量越来越大,使得在水平方向(x方向)的速度变得越来越小,从而使得对焦系统106在水平方向的步进距离越来越短。
[0081]
可以理解的是,当相机107进入检测盲区时,在已有的面型数据中,以对焦系统测量的与检测盲区相邻近的硅片环的面型数据调整反射镜的位置。其中,相邻近的硅片环的面型数据,可以为对焦系统106的光斑中心与被测晶圆108的圆心距离最近时,对焦系统106获取的硅片环的面型数据。
[0082]
下面来详细解释当相机107进入检测盲区时,可以沿用上述面型数据的原因。
[0083]
首先,将被测晶圆108抽象成一个圆盘,将被测晶圆108的支撑简化成边界均匀竖直向上支撑,承受重力这一均匀载荷,如图9所示。
[0084]
通过材料力学理论分析发现,被测晶圆108不同径向位置r的理论形变为:
[0085]
w=q(r
2-r2)/64/d[(5 μ)/(1 μ)r
2-r2],其中,w,挠度,中面各点沿着中面法线方向的位移;t,圆板厚度;q,面载荷,单位pa;r,最大半径;d,抗弯刚度,d=et3/12/(1-μ2);e,杨氏模量,160gpa;μ,泊松比,0.28;对于均匀的被测晶圆而言,q=tρg;ρ,晶圆密度,2329kg/m3;g,重力加速度,9.81m/s2;
[0086]
图10展示了8英寸被测晶圆挠度w随着径向位置r变化的理论计算结果,可以看到,在被测晶圆108中心附近晶圆挠度w变化很小,也就是被测晶圆108中心的形变很小。
[0087]
其次,对于一个参数确定的理想晶圆,通过数值计算可以获得其理论面型数据。图11至图14下列图像依次展示了不同厚度被测晶圆在背检台上的形变,且考虑了气爪的形变。从图11到图14,依次是厚度736.6um的8英寸晶圆、厚度482.6um的8英寸晶圆、厚度775um的12英寸晶圆、厚度380um的12英寸晶圆。从图11至图14的被测晶圆的面型上可以发现:
[0088]
无论何种情况,晶圆中心附近的相对形变量均远小于外圈;无论何种情况,晶圆中心附近的形变量梯度均远小于外圈;无论何种情况,越靠近晶圆中心,形变梯度总体上减小。对于8英寸晶圆,对焦系统106的检测盲区大致占整个晶圆面积的1/4。厚度736.6um、482.6um的晶圆,对焦系统106的检测盲区最大形变量分别不超过4um、10um。对于12英寸晶圆,对焦系统106的检测盲区大致占整个晶圆面积的1/9。厚度775um、380um的晶圆,对焦系
统106的检测盲区最大形变量分别不超过8um、30um。由于该相机107的焦深在60um,进而,上述检测盲区的最大形变量均未超出相机107的焦深。
[0089]
由此,当相机107处于对焦系统106的检测盲区时,可以沿用相邻近的硅片环的面型数据,即可以为对焦系统106的光斑中心与被测晶圆108的圆心距离最近时,对焦系统106获取的硅片环的面型数据。如图7所示,可以获取对焦系统106第11步进位置对应的被测晶圆108的面型数据。
[0090]
对于焦深更小的相机,则需要根据已经获得的不同位置的面型数据,结合力学模型,计算出对焦系统检测盲区的所有面型数据。或可以通过更为复杂的计算,满足不同焦深相机的需求。
[0091]
可以理解的是,当对焦系统106的光斑中心落后于相机107的视场中心至少一环时,相机107可以完全沿用对焦系统106光斑中心落后于相机107的视场中心最接近1环时的面型数据,该方法简单易用,计算量小;或者,在已经获得的面型数据中,使用最靠近晶圆中心的面型数据,该方法可以更为准确的提供面型;或者,基于已有的面型数据,进行高阶拟合,简单计算面型,该方法适合相邻视场中心的面型估算,计算量有限;或者,基于已有的面型数据和力学模型,精确计算面型,该方法适合检测盲区和相邻视场中心的面型精确计算。其中,高阶拟合的方法,以及基于力学模型和面型数据运算可采用现有技术中计算方法,本发明对此不作具体限定。下面来解释当对焦系统106的光斑中心落后于相机107的视场中心至少一环时,相机107可以沿用上述面型数据的原因。
[0092]
请继续参见图11至图14,从图11至图14中发现了被测晶圆108变形沿径向的高度梯度规律。对于被测晶圆108第10~20环(覆盖8和12英寸晶圆),对焦系统106落后于相机107一环,相邻两步之间的视场中心的高度差最大值可以计算出来。对于8英寸晶圆,厚度分别为736.6um、482.6um的情况下,这些相邻视场中心的最大高度差(连续两个密集梯度)分别不超过3um、7um。对于12英寸晶圆,厚度分别为775um、380um的情况下,这些相邻视场中心的最大高度差(连续两个密集梯度)分别不超过15um、60um。
[0093]
由此,由于相邻两个9mm*7mm视场中心的高度差是有限的,则可以使用滞后的对焦系统106测量的数据较为精确地计算当前视场中心的高度,而不会导致相机107离焦。
[0094]
进而,不论是相机107进入检测盲区还是对焦系统106的光斑中心落后于相机107的视场中心,相机107均可以基于对焦系统106已经采集的面型数据来调整反射镜103的位置。
[0095]
同时,这一对焦系统106布置方法还提高了外环的采样密度,可以提供更为准确的被测晶圆108外环面型信息。
[0096]
对于焦深更小的相机,则需要根据已经获得的不同位置的面型数据,结合力学模型或者简单拟合曲线,计算出当前视场中心所需的面型数据。可以通过更为复杂的计算,满足不同焦深相机的需求。
[0097]
图15是本发明实施例提出的晶圆背检设备的检测方法的流程图。该方法基于如前的晶圆背检设备实现,如图15所示,检测方法包括以下步骤:
[0098]
s101,被测晶圆包括n环硅片,相机沿被测晶圆的任意一径向方向步进,同时对焦系统沿平行于径向方向的方向步进;
[0099]
s102,对焦系统测量被测晶圆表面的面型数据;
[0100]
s103,相机根据面型数据调整光学系统中反射镜的位置,以使得晶圆表面始终处于相机的焦深中;
[0101]
其中,第一初始位置比第二初始位置超前m环,s≤m《t环,第一初始位置为对焦系统出射的光斑中心投射到被测晶圆的初始位置;第二初始位置为相机的视场中心投射到被测晶圆的初始位置;n为正整数,且n大于或等于2,s大于或等于0,t为光斑中心和视场中心共径时,第一初始位置比第二初始位置的超前环数。
[0102]
根据本发明的一个实施例,所述相机的步进方向和所述对焦系统的步进方向处于所述被测晶圆的不同径向方向上。
[0103]
结合图4至图7所示,光机本体沿光机本体步进方向进行步进,对焦系统的光斑中心以第一初始位置a起始测量被测晶圆的最外环的面型数据,此时,相机的视场中心处于第二初始位置b,光机本体步进一步后,对焦系统测量被测晶圆的第二环的面型数据,相机处于被测晶圆的最外环,并根据前一步中对焦系统采集的最外环的面型数据来调整反射镜的位置,以使得最外环的晶面处于相机的焦深中,以采集最外环的图像。依次类推,直至相机步进至被测晶圆的中心,完成整个被测晶圆的图像采集。
[0104]
其中,当相机步进至检测盲区后,采取以下方式来获取检测盲区的图像。
[0105]
根据本发明的一个实施例,以被测晶圆的圆心为圆心,以第一初始位置至相机步进的径向方向的垂直距离为半径的圆形区域,为被测晶圆的检测盲区;
[0106]
相机根据面型数据调整光学系统中反射镜的位置包括:
[0107]
当相机步进至检测盲区后,在已有的面型数据中,以对焦系统测量的与检测盲区相邻的环的面型数据调整反射镜的位置。
[0108]
根据本发明的一个实施例,相机根据面型数据调整光学系统中反射镜的位置包括:
[0109]
当相机步进至检测盲区后,在已有的面型数据中,以对焦系统的光斑中心与被测晶圆的圆心距离最近时,对焦系统测量的被测晶圆的面型数据调整反射镜的位置。
[0110]
需要说明的是,在设备实施例中已经详细介绍该内容,此处不再赘述。
[0111]
当对焦系统的光斑中心落后相机的视场中心至少一环,相机采取以下方式来获取检测盲区的图像。
[0112]
根据本发明的一个实施例,相机根据面型数据调整光学系统中反射镜的位置包括:
[0113]
当对焦系统的光斑中心落后相机的视场中心至少一环时,在已有的面型数据中,以对焦系统的光斑中心落后于相机的视场中心最近一环的面型数据调整反射镜的位置。
[0114]
举例来说,当对焦系统的光斑中心落后于相机的视场中心一环时,比如光斑中心处于第15环,视场中心处于第16环,那么相机仍沿用对焦系统处于第15环采集的面型数据。
[0115]
根据本发明的一个实施例,相机根据面型数据调整光学系统中反射镜的位置包括:
[0116]
当对焦系统的光斑中心落后相机的视场中心至少一环时,在已有的面型数据中,以对焦系统的光斑中心最靠近被测晶圆中心时,对焦系统测量的被测晶圆的面型数据调整反射镜。
[0117]
举例来说,当对焦系统的光斑中心落后于相机的视场中心一环时,比如光斑中心
处于第15环,视场中心处于第16环,那么相机可以采用对焦系统的光斑中心距离被测晶圆的圆心最近时的采集的面型数据。
[0118]
根据本发明的一个实施例,相机根据面型数据调整光学系统中反射镜的位置包括:
[0119]
当对焦系统的光斑中心落后相机的视场中心至少一环时,基于已有的面型数据,进行高阶拟合,获取相机的视场中心处于的当前被测晶圆的硅片环的面型数据,以调整反射镜。
[0120]
其中,可以基于已有的面型数据,进行高阶拟合,获取被测晶圆的整个面型数据,该方法计算量较大。
[0121]
根据本发明的一个实施例,相机根据面型数据调整光学系统中反射镜的位置包括:
[0122]
当对焦系统的光斑中心落后相机的视场中心至少一环时,基于已有的面型数据和力学模型,获取相机的视场中心处于的当前被测晶圆的硅片环的面型数据,以调整反射镜。
[0123]
同样的,基于已有的面型数据和力学模型,进行被测晶圆的面型数据精确计算,该方法虽然计算精准,但计算量也较大。
[0124]
也就是说,这样使得对焦系统的光斑中心和视场中心进入晶圆的时间差满足一定的圈数范围(比如对焦系统的光斑中心提前视场中心1圈进入晶圆),既能够满足前馈晶圆面型的要求,又能够提高产率;对焦系统滞后于相机的区域,恰好是面型变化(梯度)较小的区域,相邻视场的高度接近,面型数据可以相互替代,或者通过算法拟合出当前视场中心的面型,相机检测无离焦风险;对焦系统检测不到,或者严重滞后于相机的区域,都在晶圆的中心附近,恰好是晶圆形变最小的区域,基于已有的对焦系统的面型数据计算当前视场中心的面型,相机检测无离焦风险。
[0125]
根据本发明一个具体实施例提出的晶圆背检设备的检测方法,如图16所示,该检测方法包括:
[0126]
s201,开始,fs(即对焦系统,下同)步进到最外环;
[0127]
s202,fs扫略最外环,获取该环面型数据;
[0128]
s203,相机步进到最外环,fs跟随步进;
[0129]
s204,相机根据面型数据追焦,对图像进行处理;
[0130]
s205,相机继续步进到中间环,fs跟随步进;
[0131]
s206,相机根据fs的面型数据追焦,对图像进行处理;
[0132]
s207,判断fs是否落后相机超过1环,或fs开始远离晶圆中心,如果是则执行步骤s208;如果否,则返回步骤s205;
[0133]
s208,相机继续步进到最内数环;
[0134]
s209,相机根据“估算的fs面型数据”计算焦平面,处理图像;
[0135]
s210,判断相机是否拍图完成,如果是,则结束;如果否,则返回步骤s208。
[0136]
其中,步骤s209中的“估算的fs面型数据”,即为本实施例中所称的检测盲区或fs落后相机至少一环后,相机拍图追焦时所依据的晶圆的面型数据。
[0137]
总的来说,通过fs与相机不共径,在保证背检精度的前提下大幅度提高了检测产率;巧妙利用了晶圆不同部位的形变梯度,根据径向相邻aoi面型数据较为精确地计算当前
aoi面型数据,实现fs滞后相机情况下的aoi面型计算。保证相机在晶圆边缘和中间区域不离焦;在晶圆外围,fs的采样频率得到了提高,从而获取了更为精确的面型数据;巧妙利用了晶圆中心附近形变远小于外环的特点,基于已有的fs数据就能够较为精确地计算aoi的面型,保证了无fs前馈焦距情况下相机在晶圆中心附近区域不离焦;该实施例具有很好的适用性,对大弯曲、大扭转、减薄晶圆都适用。
[0138]
实际使用中发现,现有技术的缺陷识别准确率为99%;本方案的缺陷识别准确率为99%。采用此方法节约了4圈的扫描时间和4次步进时间。8英寸产率提高了30.77%(12 5圈
→
12 1圈),12英寸产率提高了21.05%(18 5圈
→
18 1圈)。
[0139]
综上所述,本发明实施例提出的晶圆背检设备及其检测方法,其中,背检设备包括:光机本体、以及设置在光机本体上的光学系统、光源、对焦系统和相机,光源用于出射探测光束至旋转的被测晶圆,经被测晶圆反射或散射的光束依次通过光学系统至相机;对焦系统用于测量被测晶圆表面的面型数据,相机用于根据面型数据调整光学系统的位置,以调整反射或散射光束至相机焦面的光程;其中,被测晶圆包括n环硅片,第一初始位置比第二初始位置超前m环,s≤m《t环,第一初始位置为对焦系统出射的光斑中心投射到被测晶圆的初始位置;第二初始位置为相机的视场中心投射到被测晶圆的初始位置;其中,n为正整数,且n大于或等于2,s大于或等于0,t为光斑中心和视场中心共径时,第一初始位置比第二初始位置的超前环数。通过改进对焦系统的光斑中心的初始位置,和相机的视场中心的初始位置,使得相机的视场中心的初始位置相较于对焦系统的光斑中心的初始位置落后的环数少于现有技术中的落后环数,进而提高检测产率。
[0140]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。