1.本发明涉及示教式机械臂设计技术领域,尤其涉及一种桌面级示教式机械臂。
背景技术:
2.机械臂能够协助或者替代人完成高风险的任务,示教式机械臂,即机械臂可以根据操纵人员的输入完成对运动轨迹的复现,示教式机械臂技术已经在自动化装配、流水线等工业场合有着较为广泛的应用。但是,面向个人的、应用于桌面办公的桌面型示教式机械臂产品较为稀少。由于机械臂的功能性与机械臂自身自由度有着直接关系,机械臂自由度越高,功能越强大,但相应的制造和使用成本也越高,要将示教式机械臂应用于日常办公首先要考虑成本,如何在满足桌面办公功能的前提下降低成本,也成为了桌面示教式机械臂能否推广的关键因素。
技术实现要素:
3.鉴于上述的分析,本发明旨在提供一种桌面级示教式机械臂,用来填补示教式机械臂在桌面办公协作领域应用的空缺,提高桌面办公的办公效率。
4.本发明的目的主要是通过以下技术方案实现的:
5.一种桌面级示教式机械臂,包括底座、云台电机外壳、小臂电机、云台电机、机械臂大臂、机械臂小臂连杆、大臂电机、机械臂小臂和可更换末端执行器;云台电机控制机械臂绕竖直方向转动;小臂电机控制机械臂小臂的转动;大臂电机控制机械臂大臂的转动;桌面级示教式机械臂,操纵人员直接手操纵末端执行器能够进行示教。
6.进一步地,械臂大臂包括等边三角形过渡杆、大臂从动杆和大臂从动杆支座。
7.进一步地,机械臂大臂通过第一活动铰链与等边三角形过渡杆连接,等边三角形过渡杆通过第二活动铰链与大臂从动杆连接,大臂从动杆通过第三活动铰链与大臂从动杆支座连接,大臂从动杆支座与底座固定连接。
8.进一步地,机械臂大臂的杆长等于大臂从动杆的长度。
9.进一步地,机械臂小臂包括曲柄、机械臂小臂连杆和小臂从动杆。
10.进一步地,小臂电机带动曲柄转动,曲柄通过第四活动铰链与机械臂小臂连杆连接,机械臂小臂连杆通过第五活动铰链与机械臂小臂连接,机械臂小臂通过第六活动铰链与机械臂大臂连接。
11.进一步地,机械臂小臂连杆的杆长等于机械臂大臂的杆长;所述曲柄的杆长等于机械臂小臂和机械臂大臂的连接铰链到机械臂小臂和机械臂小臂连杆的连接铰链之间的距离。
12.进一步地,机械臂小臂通过第六活动铰链与机械臂大臂连接,可更换末端执行器通过第七活动铰链与机械臂小臂连接,小臂从动杆通过第八活动铰链与可跟换末端执行器连接。
13.进一步地,机械臂小臂的杆长等于小臂从动杆的长度;第七活动铰链和第八活动
铰链的间距等于等边三角形过渡杆的边长。
14.进一步地,可更换末端执行器可为舵机夹爪、签字笔和印章的任意一种。
15.本发明技术方案至少能够实现以下效果之一:
16.1、本发明机械臂设计小型化,符合桌面型机械臂的设计要求,占地面积小,能够布置在桌面上,并且成本低。
17.2、本发明的桌面级示教式机械臂为具有三个转动自由度的示教式机械臂,示教方式为操纵人员直接手操纵末端执行器进行示教,相较于传统的示教盒进行示教的方式,降低了使用人员的学习门槛,具有更加简单直观的效果。
18.3、本发明可以更换不同的机械臂末端执行器,帮助工作人员完成物料分拣、签字或盖章,机械臂工作过程中能够保证末端执行器的底面与地面始终保持平行,确保末端执行器能够准确完成抓取、签字或盖章操作,设备运行效率高,提高办公人员工作效率。
19.本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书实施例以及附图中所特别指出的内容中来实现和获得。
附图说明
20.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
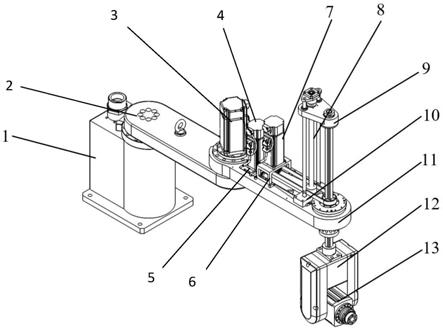
21.图1为桌面型示教式机械臂的机械结构示意图;
22.图2为机械臂小臂机构工作原理图;
23.图3为机械臂大臂机构工作原理图。
24.附图标记:
25.1-底座;2-云台电机外壳;3-小臂电机;4-云台电机;5-机械臂大臂;6-机械臂小臂连杆;7-大臂电机;8-机械臂小臂;9-可更换末端执行器;10-曲柄;11-等边三角形过渡杆;12-小臂从动杆;13-大臂从动杆;14-大臂从动杆支座。
具体实施方式
26.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明的一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
27.本发明的一个具体实施例,公开了一种桌面级示教式机械臂,如图1-图3所示,可以实现示教式机械臂在桌面办公协作领域的应用并提高桌面办公效率。
28.一种桌面级示教式机械臂,包括底座1、云台电机外壳2、小臂电机3、云台电机4、机械臂大臂5、机械臂小臂连杆6、大臂电机7、机械臂小臂8和可更换末端执行器9。本发明实例属于三轴关节机械臂,通过对三台伺服电机(dji-rm6025、2
×
dji-rm3508)的信号输入,实现对机械臂底部转台yaw轴、大臂pitch轴、小臂pitch轴的位置控制。其中,云台电机4采用dji-rm6025伺服电机,具有精度高、响应快和扭矩大等特点,是一种专为两轴和三轴云台设计的控制电机,可控制机械臂底部转台绕竖直方向中心轴线转动;小臂电机3和大臂电机7均采用dji-rm3508伺服电机,分别控制机械臂小臂8的转动和机械臂大臂5的转动,三台伺
服电机的外接线路集成到控制柜中,通过控制柜设置按钮开关集中驱动,控制机械臂示教及完成目标任务。
29.本发明实例的底座1为方形棱台结构,底座1尺寸最大范围为330mm
×
240mm,占地面积小,可布置在办公桌面上;云台电机外壳2将云台电机4环绕遮挡,并布置在底座1的上方,能够保证人员的操作安全且外形美观;小臂电机3能够控制机械臂小臂8的转动,机械臂小臂8包括曲柄10和机械臂小臂连杆6。曲柄10通过活动铰链与机械臂小臂连杆6连接,机械臂小臂连杆6通过活动铰链与机械臂小臂8连接,机械臂小臂8通过活动铰链与机械臂大臂5连接。小臂电机3启动后,如图2所示,电机主轴带动曲柄10转动,曲柄10通过机械臂小臂连杆6带动机械臂小臂8转动;曲柄10的长度等于机械臂小臂8和机械臂大臂5的连接铰链到机械臂小臂8和机械臂小臂连杆6的连接铰链之间的距离,机械臂小臂连杆6的长度等于机械臂大臂5的固定铰链到机械臂小臂8和机械臂大臂5的连接铰链之间的距离,上述设置保证机械臂小臂8的运动由平行四边形机构带动,平行四边形机构能够将曲柄10的运动传递到机械臂小臂8,保证机械臂小臂8运动轨迹与曲柄10完全一致,上述结构简化了电机的控制方式,降低了生产成本,操作便捷。
30.大臂电机7能够直接带动机械臂大臂5转动;机械臂大臂5包括大臂从动杆13、等边三角形过渡杆11和大臂从动杆支座14,如图3所示,机械臂大臂5在大臂电机7带动下绕电机主轴转动,等边三角形过渡杆11通过活动铰链与机械臂大臂5连接,大臂从动杆13的一端与等边三角形过渡杆11通过活动铰链连接,另一端与大臂从动杆支座14通过固定铰链连接,大臂从动杆支座14通过螺钉与机械臂的底座1固定,大臂从动杆13固定铰链孔的中心到大臂电机7主轴的中心距离等于等边三角形过渡杆11与机械臂大臂5和大臂从动杆13连接的两处活动铰链的间距,机械臂大臂5的杆长等于大臂从动杆13的长度,上述设置保证大臂电机7通过平行四边形机构带动等边三角形过渡杆11转动。机械臂大臂5转动过程中,机械臂大臂5和大臂从动杆13的运动方式完全相同,并能够保证等边三角形过渡杆11与地面的夹角始终不变,该种结构简化了电机控制的方式,降低了成本,保证了机械臂大臂5的运动特性的精确传递,有利于对执行机构运动特性的控制。
31.本发明实例中,可更换的末端执行器9通过两处活动铰链分别与机械臂小臂8和小臂从动杆12连接,小臂从动杆12另一端通过活动铰链与等边三角形过渡杆11连接,等边三角形过渡杆11通过活动铰链与机械臂小臂8连接。机械臂小臂8的杆长等于小臂从动杆12的杆长,可更换末端执行器9两处活动铰链的间距等于等边三角形过渡杆11的边长,机械臂小臂8、可更换末端执行器9、小臂从动杆12和等边三角形过渡杆11的一边杆组成平行四边形机构。
32.当小臂电机3启动时,曲柄10带动机械臂小臂8转动,进而带动平行四边形机构转动,转动过程中,机械臂小臂8和机械臂小臂连杆6始终保持相互平行,可更换末端执行器9作用类似于连杆,其两处活动铰链的连线与地面之间的夹角保持不变;当机械臂大臂5的电机启动时,机械臂大臂5运动带动等边三角形过渡杆11相对地面运动,进而带动平行四边形机构转动。
33.同理,可更换末端执行器9作用类似于连杆,其两处活动铰链的连线与地面之间的夹角保持不变;因此本发明实例的机械臂运动过程中,可更换末端执行器9的两处活动铰链连线与地面的夹角始终不变,能够保证末端执行器9的底面与地面始终保持平行,进而准确
完成分拣、签字和盖章等日常办公作业。与工业上应用的多轴机械臂相比,本发明实例取消了机械臂执行端的多个自由度,仅保留肘部、肩部和云台转动三个自由度,降低了生产制造的成本,依靠平行四边形机构的设计保证了实际作业的需要。
34.本发明示教式机械臂可更换的末端执行器9,可以实现不同的工作场合,例如:更换工作头为舵机夹爪,则可以实现对不同颜色、形状等的物料利用示教完成的轨迹进行分拣操作;更换工作头为签字笔,则可以完成对纸张目标位置的签字;更换工作头为印章,则可以帮助工作人员进行重复的盖章操作。
35.本发明实例能够在示教模式下实现对外力引起的运动方向、运动始末的位置以及运动速度的复现,进而通过可更换末端执行器9实现分拣、签字和盖章这些办公操作。示教前,根据要执行的操作更换末端执行器9,能够分别对分拣、签字和盖章进行示教。示教模式开启后,操纵人员直接手操纵末端执行器9,引导机械臂,一步步将实际任务操作,机器臂在引导过程中自动记忆示教的每个动作的位置、姿态、运动参数、工艺参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器臂一个启动命令,机器臂将精确地按示教动作,一步步完成全部操作,实现对外力引起的运动方向、运动始末的位置以及运动速度的复现,准确完成完成分拣、签字和盖章操作,机械臂运行效率高,能够提高办公人员工作效率。
36.本发明示教式机械臂具有3个转动自由度,相关工作参数如下:净重3.4kg,选用材料是6061铝合金和pla(3d打印材料)。采用stm32f103zet6微控制器,执行器末端最大载荷500g,执行器末端在最大速度下的最大载荷250g。机械臂航向转动工作范围-90~90
°
,最大速度180
°
/s,大臂俯仰转动工作范围0~85
°
,最大速度300
°
/s,小臂俯仰转动工作范围-18~95
°
,最大速度300
°
/s。以上参数为本发明机械臂实际工作能力,可以保证机械臂完成分拣、盖章和签字等目标任务。
37.本发明实例的机械臂大臂5和机械臂小臂8的运动由连杆机构实现。通过机械臂小臂连杆6的长度等于机械臂大臂5的长度和大臂从动杆13固定铰链孔的中心到大臂电机7主轴的中心距离等于等边三角形过渡杆11的边长的设计,保证连杆和机架长度相等,进而保证可更换末端执行器9与地面平行。
38.本发明实例主要是完成规定动作,不做大承载力的要求,主要任务是对其运动的轨迹进行设计和计算。首先按照所需的臂长将机械臂大臂5长度定为135mm,小臂8长度定为160mm。其次运用了两组双摇杆机构,根据平行四边形机构杆长特点,保证机械臂大臂5从动杆13的杆长等于机械臂大臂5的杆长,机械臂小臂从动杆12的杆长等于机械臂小臂8的杆长,机械臂小臂连杆6的杆长等于机械臂大臂5的杆长,通过杆长条件的控制,确保从动杆在任何时刻都与主动杆平行,保证连杆与与地面的夹角始终不变。
39.考虑到加工的经济性,中间衔接的三角形过渡杆设计为边长30mm的等边三角形,其三个内角都是60
°
,如图2所示。保证机架与连杆等长,大臂从动杆支座14的铰链孔圆心在以电机轴(距云台电机78mm)为圆心,30mm为半径的圆上。为了使可更换末端执行器9的避免始终平行于地面,可更换末端执行器9的定位孔间连线与竖直方向的夹角,与等边三角形过渡杆11的夹角α和电机主轴和大臂从动杆支座14铰链孔中心的连线和竖直方向的夹角β的差值,即α-β相同。优选地,β定为30
°
,即更换末端执行器9的定位孔间连线与竖直方向的夹角应为30
°
,此时大臂从动杆支座14铰链孔距离电机主轴的水平距离为15mm,距离主轴中心
的中心距为30mm,以此可以确定大臂从动杆支座14铰链孔的位置,保证机械臂大臂5始终与机械臂大臂5从动杆保持平行。
40.同理,带动机械臂小臂8转动的曲柄10长度也为30mm,并保证机械臂小臂8和机械臂大臂5连接的铰链孔中心到机械臂小臂8和机械臂小臂连杆6连接的铰链孔中心之间的间距也为30mm。综合以上设计考虑,保证可更换末端执行器9的底面与地面始终保持平行,能够准确完成分拣、签字和盖章操作,有效提高办公效率。
41.大臂从动杆支座14的底面通过螺钉与底座1固定连接。该连杆基座选用铝合金5052板材加工,材质密度小、强度高、折弯性能好、成本低、耐腐蚀性能强。机械臂小臂连杆6主要承担来自垂直于其截面方向的轴力,不受弯扭,采用强度高、硬度高的铝合金6061板材。
42.大臂从动杆支座14通过固定铰链与大臂从动杆13连接,能够限制其5个自由度。大臂从动杆支座14与机械臂大臂5协调工作,既不影响机械臂大臂5的设定活动,同时又保证了可更换末端执行器9底面的水平要求。在机械运转中,大臂从动杆支座14主要需承受静止状态下配合孔光轴对其下半柱面产生的锥形载荷以及连杆在运转中的惯性通过光轴对其产生的径向力。
43.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。