1.本发明涉及一种辅助驾驶系统和车辆,属于辅助安全驾驶技术领域。
背景技术:
2.为了减少人为因素导致的车祸,提高行车安全,市面上许多车型均具有辅助驾驶系统,目前所开发的大多数辅助驾驶系统,一般是依托包含毫米波传感器、视觉传感器、超声波传感器和激光雷达传感器等各类传感器的环境感知系统获取车身周围的障碍物信息,然后结合车身周围的障碍物信息和车辆基本状态信息,实现油门防误踩、碰撞缓解和碰撞预警等辅助驾驶功能。例如:如果辅助驾驶系统根据车身周围的障碍物信息和车辆基本状态信息判断出危险,而驾驶员没有对危险作出正确响应或者发生误踩油门踏板的情况时,辅助驾驶系统将通过3d平视显示屏警示并发出蜂鸣声,对驾驶者预警,并在必要情况下会自动制动,以避免车辆与障碍物发生碰撞。
3.但是,目前的辅助驾驶系统程序基本都运行在cortex-a15 linux系统,从linux系统上电启动到各个传感器、决策处理程序完成初始化并进入正常工作状态,整个辅助驾驶系统准备就绪需要1分钟以上。在这1分钟内,辅助驾驶系统中的油门防误踩、碰撞预警和碰撞缓解功能均无法正常使用,在车辆刚上电起步阶段,无法防范和规避因司机误操作造成的车辆危险,存在一定的安全隐患。
技术实现要素:
4.本发明的目的在于提供一种辅助驾驶系统和车辆,用以解决目前的辅助驾驶系统所需的启动时间较长,在启动期间辅助驾驶功能无法使用存在安全隐患的问题。
5.为实现上述目的,本发明提供了一种辅助驾驶系统,该辅助驾驶系统包括主控制系统和备用控制系统,所述主控制系统和备用控制系统均能独立实现辅助驾驶功能,其中,所述主控制系统基于linux系统实现辅助驾驶功能,所述备用控制系统基于单片机实现辅助驾驶功能;
6.车辆上电后,主控制系统和备用控制系统同时启动,在主控制系统启动期间由备用控制系统实现辅助驾驶功能;在主控制系统启动完成后或者到达设定的退出时间,备用控制系统退出辅助驾驶功能,由主控制系统实现辅助驾驶功能。
7.该辅助驾驶系统的有益效果是:辅助驾驶系统包含两套系统,一套是基于单片机实现辅助驾驶功能的备用控制系统,一套是基于linux系统实现辅助驾驶功能的主控制系统,这两套系统均能独立实现辅助驾驶功能,其中,车辆上电后,主控制系统和备用控制系统同时启动,在主控制系统启动期间由备用控制系统实现辅助驾驶功能;在主控制系统启动完成后或者到达设定的退出时间,备用控制系统退出辅助驾驶功能,由主控制系统实现辅助驾驶功能。在主控制系统完成启动前由单片机系统实现辅助驾驶功能,充分利用单片机系统启动时间短的优点,解决了现有仅基于linux系统实现的辅助驾驶系统所需的启动时间长,在完成启动前辅助驾驶功能不起作用的问题,使得在车辆刚上电起步阶段,也能实
现辅助驾驶功能,也能防范和规避因司机误操作造成的车辆危险,更加安全。
8.进一步地,在上述辅助驾驶系统中,车辆行驶过程中,主控制系统和备用控制系统实时通讯,若主控制系统出现故障则切换到备用控制系统,由备用控制系统实现辅助驾驶功能。
9.进一步地,在上述辅助驾驶系统中,在备用控制系统实现辅助驾驶功能期间,若备用控制系统出现故障或者主控制系统恢复正常,则切换到主控制系统,由主控制系统实现辅助驾驶功能。
10.进一步地,在上述辅助驾驶系统中,所述主控制系统基于cortex-a15 linux系统实现辅助驾驶功能,所述备用控制系统基于tc234单片机实现辅助驾驶功能。
11.本发明还提供了一种车辆,该车辆包括:
12.环境感知系统,所述环境感知系统包含单目视觉传感器、双目视觉传感器、毫米波传感器、超声波雷达传感器和激光雷达传感器中的至少一种;
13.辅助驾驶系统,所述辅助驾驶系统包括主控制系统和备用控制系统,环境感知系统中的各传感器通过can总线与备用控制系统通讯连接,主控制系统和备用控制系统之间通过can总线、spi总线和以太网通讯连接;
14.整车控制器,主控制系统和备用控制系统均通过can总线与整车控制器通讯连接;
15.其中,所述主控制系统和备用控制系统均能独立实现辅助驾驶功能,所述主控制系统基于linux系统实现辅助驾驶功能,所述备用控制系统基于单片机实现辅助驾驶功能;
16.车辆上电后,主控制系统和备用控制系统同时启动,在主控制系统启动期间由备用控制系统实现辅助驾驶功能;在主控制系统启动完成后或者到达设定的退出时间,备用控制系统退出辅助驾驶功能,由主控制系统实现辅助驾驶功能。
17.该车辆的有益效果是:该车辆的辅助驾驶系统中包含两套系统,一套是基于单片机实现辅助驾驶功能的备用控制系统,一套是基于linux系统实现辅助驾驶功能的主控制系统,这两套系统均能独立实现辅助驾驶功能,其中,车辆上电后,主控制系统和备用控制系统同时启动,在主控制系统启动期间由备用控制系统实现辅助驾驶功能;在主控制系统启动完成后或者到达设定的退出时间,备用控制系统退出辅助驾驶功能,由主控制系统实现辅助驾驶功能。在主控制系统完成启动前由单片机系统实现辅助驾驶功能,充分利用单片机系统启动时间短的优点,解决了现有仅基于linux系统实现的辅助驾驶系统所需的启动时间长,在完成启动前辅助驾驶功能不起作用的问题,使得在车辆刚上电起步阶段,也能实现辅助驾驶功能,也能防范和规避因司机误操作造成的车辆危险,更加安全。
18.进一步地,在上述车辆中,车辆行驶过程中,主控制系统和备用控制系统实时通讯,若主控制系统出现故障则切换到备用控制系统,由备用控制系统实现辅助驾驶功能;在备用控制系统实现辅助驾驶功能期间,若备用控制系统出现故障或者主控制系统恢复正常,则切换到主控制系统,由主控制系统实现辅助驾驶功能。
19.这样做的有益效果是:车辆行驶过程中,主控制系统和单片机系统实时监管对方状态,以便在对方出现故障时及时接管车辆,保障辅助驾驶功能无间隙运行,解决了现有的辅助驾驶系统中只有一个控制系统,当控制系统出现故障时无法保障车辆安全的问题,提高了辅助驾驶系统的整体可靠性、时效性和安全性,形成了更加可靠的双冗余安全方案。
20.进一步地,在上述车辆中,所述主控制系统基于cortex-a15 linux系统实现辅助
驾驶功能,所述备用控制系统基于tc234单片机实现辅助驾驶功能。
21.进一步地,在上述车辆中,该车辆还包括组合仪表,所述主控制系统通过can总线与组合仪表通讯连接。
22.进一步地,在上述车辆中,该车辆还包括电子制动系统,所述整车控制器通过can总线与电子制动系统通讯连接。
23.进一步地,在上述车辆中,该车辆还包括中央网关,所述主控制系统、整车控制器和备用控制系统均通过can总线与中央网关通讯连接。
附图说明
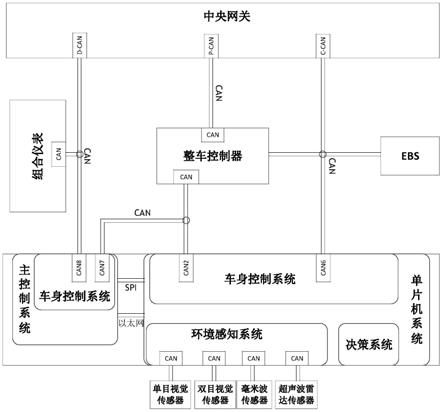
24.图1是本发明车辆实施例中的辅助驾驶系统结构示意图;
25.图2是本发明车辆实施例中的车辆行驶过程中主控制系统和单片机系统之间的切换流程图。
具体实施方式
26.本发明提供了一种辅助驾驶系统,能够实现现有技术中一般辅助驾驶系统具有的油门防误踩、碰撞缓解、碰撞预警等辅助驾驶功能,适用于客车、乘用车等各类机动车辆,并且能够弥补现有辅助驾驶系统所需的启动时间较长的不足,具有启动时间短,时效性强,更加安全可靠的特点,本发明受国家自然科学基金资助(u1664264)。
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。
28.车辆实施例:
29.如图1所示,本实施例的车辆包括:
30.环境感知系统,环境感知系统包含单目视觉传感器、双目视觉传感器、毫米波传感器和超声波雷达传感器,环境感知系统负责获取车辆周边的障碍物信息(以下简称环境感知数据);
31.辅助驾驶系统,辅助驾驶系统包括主控制系统和备用控制系统(即单片机系统),其中,主控制系统和备用控制系统均能独立实现辅助驾驶功能,主控制系统基于linux系统(例如cortex-a15 linux系统)实现辅助驾驶功能,备用控制系统基于单片机(例如tc234单片机)实现辅助驾驶功能。环境感知系统中的各传感器通过can总线与单片机系统通讯连接,主控制系统和单片机系统之间通过can总线、spi总线和以太网通讯连接;
32.整车控制器,主控制系统和单片机系统均通过can总线与整车控制器通讯连接;
33.组合仪表,主控制系统通过can总线与组合仪表通讯连接;
34.电子制动系统(ebs),整车控制器通过can总线与电子制动系统通讯连接;
35.中央网关,主控制系统、整车控制器和单片机系统均通过can总线与中央网关通讯连接。
36.下面结合图1对辅助驾驶系统进行详细介绍:
37.由图1可以看出,环境感知系统中的各传感器均采用独立的can总线直接连接单片机系统,单片机系统与主控制系统之间通过spi总线和以太网进行双向高速数据通信,从而单片机系统能够将环境感知系统获取的原始环境感知数据通过spi总线和以太网同时发送
给主控制系统,实现环境感知数据的冗余发送功能,实现环境感知数据在单片机系统和主控制系统之间的实时共享,避免因一路通道出现故障导致主控制系统接收不到环境感知数据的问题。作为其他实施方式,还可以使环境感知系统中的各传感器均采用独立的can总线直接连接主控制系统,这样主控制系统不仅可以通过单片机系统的共享获得环境感知数据,还可以直接从各传感器中获得环境感知数据,进一步保证主控制系统能够接收到环境感知数据。
38.同时,单片机系统与主控制系统之间还能通过can总线实现稳定、冗余的双向状态监管,使得主控制系统和单片机系统能实时掌握对方的状态信息(故障或正常),以便在对方出现故障时及时接管车辆,保障辅助驾驶功能无间隙运行,提高行车安全;作为其他实时方式,还可以通过整车控制器实时监管单片机系统和主控制系统的状态,当其中一个故障时,由整车控制器通知另一个接管车辆,保障辅助驾驶功能无间隙运行。
39.本实施例中,通过can总线、以太网和spi总线实现主控制系统和单片机系统之间的冗余数据通讯,提高了数据可靠性,其中,通过增加以太网传输通道,解决了can总线数据带宽低、传输数据量小的问题,通过增加spi总线传输通道,解决了单路以太网通讯存在干扰、丢包的问题,实现了更加稳定可靠的数据传输通道。
40.本实施例中,主控制系统和单片机系统的功能相同,均能够通过对环境感知系统获取的原始环境感知数据进行分析处理得到车身周围障碍物信息的融合结果,并依据障碍物信息的融合结果和车辆基本状态信息,实现油门防误踩、碰撞缓解和碰撞预警等辅助驾驶功能。其中,油门防误踩功能用于车辆起步阶段,在前方有障碍物,司机猛踩油门起步的情况下,主控制系统或单片机系统通过对车辆下发制动指令,达到不响应司机猛踩油门起步的操作,避免因司机误操作导致的车辆危险发生。碰撞缓解和碰撞预警功能用于车辆行驶阶段,在车辆前方有障碍物,司机未进行制动的情况下,主控制系统或单片机系统通过车辆组合仪表显示预警信息并发出蜂鸣声提醒司机进行制动避障,在已进行碰撞预警提醒但司机仍未进行制动的情况下,主控制系统或单片机系统根据当前车速下发制动指令,尽最大可能地避免和减缓车辆与前方障碍物的碰撞。
41.本实施例中,环境感知系统包含单目视觉传感器、双目视觉传感器、毫米波传感器和超声波雷达传感器,由于环境感知系统中包含多种传感器,多类型传感器感知数据的接入,保障了障碍物信息融合结果更加准确,降低了障碍物信息误报、漏报导致辅助驾驶功能误触发产生车辆危险的概率,提高了车辆驾驶舒适性;作为其他实施方式,环境感知系统中包含的传感器种类和数量均可以根据实际需要设置,例如环境感知系统还可以包含激光雷达传感器。
42.下面结合图2详细介绍本实施例的辅助驾驶系统的工作过程:
43.(1)车辆上电后,主控制系统和单片机系统同时启动,在主控制系统启动期间由单片机系统实现辅助驾驶功能;在主控制系统启动完成后或者到达设定的退出时间(退出时间大于或等于主控制系统所需的启动时间),单片机系统退出辅助驾驶功能,由主控制系统实现辅助驾驶功能;
44.(2)车辆行驶过程中,主控制系统和单片机系统实时通讯(例如通过双方系统中的车身控制系统实时监管对方状态),若主控制系统出现故障则切换到单片机系统,由单片机系统实现辅助驾驶功能;在单片机系统实现辅助驾驶功能期间,若单片机系统出现故障或
者主控制系统恢复正常,则切换到主控制系统,由主控制系统实现辅助驾驶功能。
45.也就是说,在车辆行驶过程中,为了保障辅助驾驶功能无间隙运行,主控制系统和单片机系统均会对环境感知系统获取的环境感知数据进行分析处理,并依据障碍物信息的融合结果和车辆基本状态信息生成相应的控制指令,但是在同一时间只有一个系统会对外发送涉及辅助驾驶相关的控制信息。
46.其中,单片机系统出现故障包括以下几种情况:1)单片机系统检测到环境感知数据不可用,包括环境感知系统本身出现问题,或者单片机系统与环境感知系统之间的通讯出现异常;2)单片机系统超过设定时间(例如30秒)没有收到车辆基本信息。
47.综上所述,本实施例的辅助驾驶系统包含两套系统,一套是基于单片机实现的备用控制系统,一套是基于linux系统实现的主控制系统,通过单片机系统和主控制系统的双向监管监控和动态切换实现具有油门防误踩、碰撞预警和碰撞缓解等辅助驾驶功能。其中,单片机系统具有启动时间短、高性能、高可靠性、功耗低等优点,在主控制系统完成启动前由单片机系统实现辅助驾驶功能,充分利用单片机系统启动时间短的优点,解决了现有仅基于linux系统实现的辅助驾驶系统所需的启动时间长,在完成启动前辅助驾驶功能不起作用的问题,使得在车辆刚上电起步阶段,也能实现辅助驾驶功能,也能防范和规避因司机误操作造成的车辆危险,更加安全;车辆行驶过程中,主控制系统和单片机系统实时监管对方状态,以便在对方出现故障时及时接管车辆,保障辅助驾驶功能无间隙运行,解决了现有的辅助驾驶系统中只有一个控制系统,当控制系统出现故障时无法保障车辆安全的问题,提高了辅助驾驶系统的整体可靠性、时效性和安全性,形成了更加可靠的双冗余安全方案。
48.辅助驾驶系统实施例:
49.本实施例的辅助驾驶系统与车辆实施例中的辅助驾驶系统相同,此处不再赘述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。