1.本发明涉及外壳拼装领域,尤其是涉及一种外壳拼装设备及方法。
背景技术:
2.断路器是塑料外壳式断路器的简称,断路器能够关合、承载和开断正常回路条件下的电流,是能够在规定的时间内承载和开断异常回路条件下的电流的开关装置。能够对电源线路及用电器等实行保护,当它们发生过载或者短路及欠压等故障时能够自动切断电路。
3.断路器外壳由上壳体和下壳体组成,现有技术中断路器外壳一般采用螺丝连接方式将上壳体和下壳体连接。
4.断路器外壳的上壳体和下壳体均由注塑成型,再对上壳体和下壳体进行拼装,原工艺拼装方法有两种:
5.1注塑机模具出来的外壳自动掉落,人工拾起进行拼装作业,每台注塑机需配1人,需要消耗大量的人力;
6.2注塑机模具出来的外壳通过机械手抓取,放置到专门设计制作的拼装设备上拼装。专用拼装设备构造复杂,体积大,且成本高。
7.因此如何设计出一种构造精简并且拼装方便的拼装设备是一个需要解决的问题。
技术实现要素:
8.本发明的目的在于克服现有技术的缺陷,提供一种结构简单、可靠性高的外壳拼装设备及方法。
9.为实现上述目的,本发明采用了如下技术方案:
10.一种外壳拼装设备,包括机械手和与机械手连接的拼装装置,机械手用于将拼装装置移动到与注塑机对应的位置,所述拼装装置包括合盖机构和设于合盖机构上的夹吸机构;
11.所述夹吸机构包括两组夹吸部并分别用于夹吸上壳体和下壳体;
12.所述合盖机构用于带动夹吸机构的两组夹吸部翻转到第一位置并装配或者翻转到第二位置;在所述第一位置,两组夹吸部的正面相对,沿着夹吸机构的高度方向排列,夹吸方向相反;在所述第二位置,两组夹吸部沿着夹吸机构的长度或宽度方向排列,夹吸方向相同。
13.优选地,所述拼装装置还包括与机械手连接的翻转机构,合盖机构与翻转机构连接,所述翻转机构用于带动夹吸机构翻转,使得夹吸机构正对注塑机上的上壳体与下壳体或者使夹吸机构复位。
14.优选地,所述拼装装置上还设有用于夹取料头的夹料头组件。
15.优选地,所述夹吸部为用于吸取上壳体和下壳体的真空吸嘴,所述真空吸嘴共有两组,其中一组真空吸嘴的一侧设有用于夹取料头的夹料头组件。
16.优选地,所述合盖机构包括翻板组件、连接于翻板组件一端的动力组件和设于翻板组件一侧的下压组件;
17.所述翻板组件与其中一组夹吸部相连并用于带动该组夹吸部翻转到与另一组吸合部处于第一位置或处于第二位置;
18.所述动力组件用于带动翻板组件进行翻转;
19.所述下压组件与另一组夹吸部相连以用于进行上壳体和下壳体的装配。
20.优选地,所述翻板组件包括翻转动板和翻转静板,下压组件设于翻转动板上,翻转静板上设置有一组夹吸部,翻转动板上设有与下压组件连接的另一组夹吸部,翻转动板通过支板与翻转静板铰接。
21.优选地,所述下压组件包括设于翻转动板上的拼装合盖气缸和与拼装合盖气缸的活塞杆相连的下压板,拼装合盖气缸和下压板分别设于翻转动板的两侧,拼装合盖气缸的活塞杆穿过翻转动板与下压板相连,夹吸部安装于下压板上。
22.优选地,所述动力组件包括连接于翻转静板上的拼装旋转气缸、与旋转气缸连接的第一链轮、设于翻转动板上的第二链轮和连接于第一链轮和第二链轮上的链条。
23.优选地,所述夹料头组件包括与合盖机构相连的夹料头气缸和与夹料头气缸的活塞杆相连的夹板,所述夹板呈剪刀状。
24.优选地,所述翻转机构包括与机械手相连的侧姿气缸和设于合盖机构上的连接板,所述侧姿气缸的活塞杆与连接板相连。
25.优选地,所述翻转静板和翻转动板上均设有产品外壳挡块,产品外壳挡块环绕夹吸部设置。
26.优选地,所述翻转动板上的环绕每个夹吸部上的产品外壳挡块共有三组并呈三角形设置,翻转静板上的环绕每个夹吸部上的产品外壳挡块共有四组并呈四边形设置。
27.优选地,所述翻转静板对应夹吸部的位置处设有环形的安装座,夹吸部安装于安装座内。
28.优选地,所述下压板和翻转静板上的夹吸部均多组并沿着翻转静板的长度方向间隔设置。
29.一种外壳拼装方法,其特征在于包括以下步骤:机械手带动拼装装置移动到注塑机位置处,拼装装置的两组夹吸部分别将上壳体和下壳体从注塑机取出,拼装装置将两组夹吸部转动到正对位置,将上壳体和下壳体装配。
30.一种外壳拼装方法,其特征在于包括以下步骤:步骤1,机械手工作并带动拼装装置移动到注塑机位置处,此时夹吸机构处于打开状态;
31.步骤2,翻转机构带动夹吸机构和合盖机构旋转使夹吸机构的两组夹吸部分别与注塑机模具内的上壳体和下壳体对应;
32.步骤3,夹吸部吸住上壳体和下壳体,夹料头组件工作并夹住料头;
33.步骤4,翻转机构带动夹吸机构和合盖机构反向旋转,使拼装装置从注塑机模具内退出,夹料头组件松开料头,料头掉落;
34.步骤5,拼装旋转气缸工作带动翻转动板翻转到翻转静板上,使翻转动板上的一组夹吸部与翻转静板上的一组夹吸部相对设置,夹吸机构处于闭合状态;
35.步骤6,拼装合盖气缸工作并带动一组夹吸部下压到另一组夹吸部使上壳体装配
到下壳体上,完成对断路器外壳的拼装;
36.步骤7,拼装合盖气缸复位,拼装旋转气缸复位,夹吸部停止吸气,放下拼装好的产品,拼装装置完成一次动作循环。
37.本发明的外壳拼装设备及方法采用将机械手与拼装装置结合的方式,将上壳体和下壳体从注塑机中直接取出并组装来实现对断路器壳体的拼装,在进行拼装时,机械手将拼装装置送入注塑机位置处,拼装装置将上壳体和下壳体从注塑机内直接取出,并在拼装装置内完成拼装,采用这种机械手与拼装装置的结合的方式,有效简化了拼装装置的结构,并且体积小、成本低、泛用性高。
38.此外,真空吸嘴在打开状态吸取有上壳体和下壳体后,动力组件工作并带动翻转组件翻转,使得一组真空吸嘴翻转到另一组真空吸嘴上,实现闭合状态,而后下压组件带动一组真空吸嘴下压,使得上壳体和下壳体相互靠近进行装配,装配完成后,真空吸嘴停止吸气,两组真空吸嘴打开,装配完成的断路器壳体掉落,完成一组拼装动作循环,并进入下一次拼装流程。
附图说明
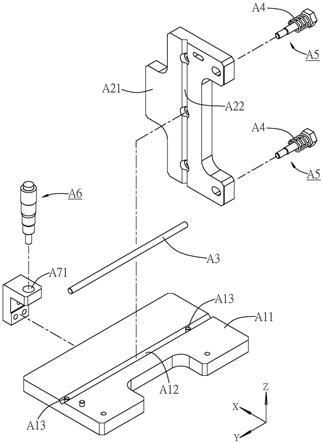
39.图1是本发明拼装装置整体的结构示意图;
40.图2是本发明凸显下压组件的结构示意图;
41.图3是本发明凸显夹料头组件的结构示意图;
42.图4是本发明外壳拼装设备的整体结构示意图。
43.图中:1、合盖机构;11、翻板组件;111、翻转动板;112、翻转静板;113、第一支板;114、第二支板;115、产品外壳挡块;116、安装座;12、动力组件;121、拼装旋转气缸;122、第一链轮;123、第二链轮;124、链条;13、下压组件;131、拼装合盖气缸;132、下压板;133、安装槽;2、夹吸机构;21、真空吸嘴;22、夹料头气缸;23、夹板;3、连接板。
具体实施方式
44.以下结合附图1至4给出的实施例,进一步说明本发明的外壳拼装设备及方法的具体实施方式。本发明的外壳拼装设备及方法不限于以下实施例的描述。
45.如图4所示,一种外壳拼装设备,采用将机械手200与拼装装置100结合的方式,将拼装装置100作为机械手200的夹具,将上壳体和下壳体从注塑机300中直接取出并组装来实现对断路器壳体的拼装,在进行拼装时,机械手200将拼装装置100送到注塑机300位置处,拼装装置100将上壳体和下壳体从注塑机内直接取出,并在拼装装置内完成拼装,采用这种机械手200与拼装装置100的结合的方式,简化了拼装步骤,且有效简化了拼装装置的结构,并且体积小、成本低、泛用性高。
46.所述机械手200能够推动拼装装置100水平移动和或垂直移动,用于将拼装装置100移动到与注塑机300对应的位置,拼装装置100作为机械手200的夹具,用于从注塑机300中取出上壳体和下壳体,并拼装。所述机械手包括水平移动机构和或垂直移动机构,将拼装装置送到注塑机位置处;或者,所述机械手为万向轴连接的多段机械臂;或者是其它结构的移动装置,均属于本发明的保护范围。
47.如图1所示,本发明的一个改进点在于拼装装置。所述拼装装置包括合盖机构1和
设于合盖机构1上的夹吸机构2,夹吸机构2共有两组夹吸部并分别用于夹吸上壳体和下壳体,将上壳体和下壳体从注塑机上取出,合盖机构1用于带动夹吸机构2的两组夹吸部翻转到正面正对位置并装配或者翻转到侧面正对状态,两个夹吸部翻转到正对位置时将上壳体和下壳体拼接装配,夹吸部的正面为对壳体产生吸力的面,侧面为与正面相邻的面。
48.夹吸机构2在合盖机构1的带动下共有两种状态:当两组夹吸部翻转到两者的正面正相对时,该位置为夹吸部的第一位置,两组夹吸部的正面相对,沿着夹吸机构的高度方向排列,夹吸方向相反,此时上壳体与下壳体正对设置,形成闭合状态,闭合状态能够进行上壳体和下壳体的拼装;当两组夹吸部翻转到两者并排设置时,该位置为夹吸部的第二位置,两组夹吸部沿着夹吸机构的长度或宽度方向排列,位于同一平面,夹吸方向相同,上壳体与下壳体的内侧面均朝向一侧设置,形成打开状态,打开状态能够进行上壳体和下壳体的夹吸,将上壳体和下壳体从注塑机上取出。
49.优选的,所述拼装装置还包括与机械手连接的翻转机构,合盖机构1与翻转机构连接,所述翻转机构用于带动夹吸机构2翻转,使得夹吸机构2正对注塑机上的上壳体与下壳体或者使夹吸机构2复位,不正对着注塑机。在正对注塑机上的上壳体与下壳体时,夹吸机构2将上壳体与下壳体吸住,复位后即将上壳体和下壳体取出,在不对着注塑机的时候进行合盖拼装,结构简单且效率高。当然,也可以不设置翻转机构,直接通过机械手进行操作,在夹吸机构2取出上壳体和下壳体后,机械手带动夹吸机构2离开然后进行组装。采用设置在拼装装置上的翻转机构,通过翻转机构转动完成取出动作,结构简单且效率高。
50.优选的,所述拼装装置上还设有用于夹取注塑机内的多余料头的夹料头组件。
51.注塑机内的上壳体和下壳体注塑完成后,机械手推动拼装装置移动到注塑机模具内,此时夹吸机构2为打开状态,翻转机构工作并带动夹吸机构2和合盖机构1翻转90
°
,拼装装置进入到注塑机模具内并由夹吸机构2吸住上壳体和下壳体同时夹住产品的料头,而后拼装装置退出注塑机,夹吸机构2丢掉料头,翻转机构带动夹吸机构2和合盖机构1复位,合盖机构1带动夹吸机构2翻转到闭合状态对上壳体和下壳体进行拼装,拼装完成后,合盖机构1复位,夹吸机构2复位,放下拼装好的产品,拼装装置完成一次拼装动作循环,并进入下一次拼装流程。
52.优选地,所述夹吸部为真空吸嘴21,其中一组真空吸嘴21的一侧设有夹料头组件,真空吸嘴21用于吸取上壳体和下壳体,夹料头组件用于夹取料头。当然,根据需要也可以不采用真空吸嘴21,而采用气缸配合进行机械夹持的方式,但这种方式没有采用真空吸嘴21的方式效率高,且结构也相对复杂。
53.如图1-3所示,优选地,合盖机构1包括翻板组件11、连接于翻板组件11一端的动力组件12和设于翻板组件11一侧的下压组件13,翻板组件11与其中一组真空吸嘴21相连并用于带动该组夹吸部翻转到与另一组夹吸部处于第一位置状态或与另一组夹吸部处于第二位置状态,动力组件12给翻转组件提供动力并用于带动翻转组件进行翻转,下压组件13与另一组真空吸嘴21相连并用于带动真空吸嘴21下压以进行上壳体和下壳体的装配。
54.真空吸嘴21在打开状态吸取上壳体和下壳体后,动力组件12工作并带动翻板组件11翻转,使得一组真空吸嘴21翻转到另一组真空吸嘴21上,实现闭合状态,而后下压组件13带动一组真空吸嘴21下压,使得上壳体和下壳体相互靠近进行装配,装配完成后,真空吸嘴21停止吸气,两组真空吸嘴21打开,装配完成的断路器壳体掉落,完成一组拼装动作循环,
并进入下一次拼装流程。
55.如图1所示,优选地,所述翻板组件11包括翻转动板111和翻转静板112,下压组件13设于翻转动板111上,翻转静板112上设置有一组夹吸部,翻转动板111上设有与下压组件13连接的另一组夹吸部,翻转动板111通过支板与翻转静板112铰接。
56.具体的,翻转静板112上直接设置有一组真空吸嘴21,所述支板包括第一支板113和第二支板114,翻转动板111上设有第一支板113,翻转静板112上设有第二支板114,第一支板113和第二支板114均有两组并分别设于翻转动板111和翻转静板112的两端,第一支板113远离翻转动板111的一端与相邻第二支板114远离翻转静板112的一端铰接。在进行断路器壳体的装配时,动力组件12带动翻转动板111沿着第一支板113和第二支板114的铰接部翻转到翻转静板112上,实现夹吸机构2的闭合状态。
57.如图2和图3所示,优选地,下压组件13包括设于翻转动板111上的拼装合盖气缸131和与拼装合盖气缸131的活塞杆相连的下压板132,拼装合盖气缸131和下压板132分别设于翻转动板111的两侧,翻转动板111对应拼装合盖气缸131的位置处开设有圆形通孔,拼装合盖气缸131的活塞杆穿过圆形通孔与下压板132相连,下压板132上开设有圆形的安装槽133,真空吸嘴21安装于下压板132的安装槽133内。在进行第一壳体和第二壳体的装配时,拼装合盖气缸131的活塞杆伸张,带动下压板132向翻转静板112靠近,同时第一壳体和第二壳体相互靠近实现装配。
58.优选地,动力组件12包括连接于翻转静板112上的拼装旋转气缸121、设于拼装旋转气缸121上的第一链轮122、设于翻转动板111上的第二链轮123和连接于第一链轮122和第二链轮123上的链条124,第二链轮123设于第一支板113和第二支板114铰接处。常态下翻转静板112和翻转动板111呈180
°
,并排平行设置,在进行第一壳体和第二壳体的装配时,拼装旋转气缸121工作并带动第一链轮122和第二链轮123转动,第二链轮123带动翻转动板111翻转到翻转静板112上,层叠设置,实现闭合状态。当然,动力组件12也可以采用皮带传动,另外动力组件12也可以不采用旋转电机、或者伸缩气缸的方式带动翻转动板111转动。
59.优选地,夹料头组件包括与翻转静板112相连的夹料头气缸22和与夹料头气缸22的活塞杆相连的夹板23,用于去除壳体上的料头,夹板23呈剪刀状并设于翻转静板112的下方,在进行料头的夹取时,夹料头气缸22的活塞杆伸张,带动夹板23伸出到翻转动板111与翻转静板112之间并夹住料头;拼装装置从注塑机内伸出后,夹料头气缸22的活塞杆收缩,带动夹板23回到翻转静板112的下方并与料头分离,料头失去支撑并自动掉落。
60.优选地,翻转机构包括与机械手相连的侧姿气缸和设于翻转静板112上的连接板3,所述侧姿气缸的活塞杆与连接板3相连。在将拼装装置伸入到注塑机模具内时,侧姿气缸的活塞杆工作并带动夹吸机构2和合盖机构1翻转90
°
,拼装装置从注塑机内伸出后,侧姿气缸的活塞杆反向转动90
°
使得夹吸机构2和合盖机构1回到原位,完成对断路器壳体的夹取。连接板3一端转动的安装在固定座上,机械手夹持固定座。
61.为了防止真空吸嘴21在吸取断路器壳体后断路器壳体在运动的过程中发生偏移,翻转静板112和翻转动板111上均设有产品外壳挡块115,产品外壳挡块115环绕真空吸嘴21设置,当真空吸嘴21上吸取有上壳体或下壳体后,产品外壳挡块115与上壳体或下壳体的侧壁相贴以完成限位,防止上壳体和下壳体晃动。
62.由于断路器壳体的上壳体和下壳体结构并不相同,因此翻转动板111和翻转静板
112上的产品外壳挡块115数量不同,翻转动板111上的环绕每个真空吸嘴21上的产品外壳挡块115共有三组并呈三角形设置,翻转静板112上的环绕每个真空吸嘴21上的产品外壳挡块115共有四组并呈四边形设置,这样上壳体和下壳体均能够得到更为稳定的限位。
63.如图1所示,优选地,翻转静板112对应真空吸嘴21的位置处设有环形的安装座116,真空吸嘴21安装于安装座116内以得到稳定固定。
64.为了提高效率,下压板132和翻转静板112上的真空吸嘴21均有三组并沿着翻转静板112的长度方向间隔设置,这样拼装装置能够一次完成对三组断路器壳体的拼装,效率更高。
65.本发明还涉及一种小型断路器外壳拼装方法,包括以下步骤:机械手带动拼装装置移动到注塑机位置处,拼装装置的两组夹吸部分别将上壳体和下壳体从注塑机取出,拼装装置将两组夹吸部转动到正对位置,将上壳体和下壳体装配。
66.本发明还涉及一种小型断路器外壳拼装方法,具体包括以下步骤:
67.步骤1,机械手工作并带动拼装装置移动到注塑机位置处,此时夹吸机构2处于打开状态;
68.步骤2,翻转机构的侧姿气缸动作,带动夹吸机构2和合盖机构1旋转90
°
,进入到注塑机模具内,使夹吸机构(2)的两组夹吸部分别与注塑机模具内的上壳体和下壳体对应;
69.步骤3,真空吸嘴21产生吸力并吸住上壳体和下壳体,夹料头组件工作并夹住料头,由产品外壳挡块115对断路器外壳进行定位;
70.步骤4,翻转机构的侧姿气缸带动夹吸机构2和合盖机构1反向旋转90
°
,拼装装置从注塑机模具内退出,夹料头组件上的夹板23松开料头,料头掉落;
71.步骤5,合盖机构1的拼装旋转气缸121工作带动翻转动板111和上壳体翻转到翻转静板112上,夹吸机构2处于闭合状态;
72.步骤6,拼装合盖气缸131工作并带动下压板132,使一组夹吸部下压到另一组夹吸部,使上壳体装配到下壳体上,完成对断路器外壳的拼装;
73.步骤7,拼装合盖气缸131复位,拼装旋转气缸121复位,拼装装置打开,夹吸部的真空吸嘴21停止吸气,放下拼装好的产品,拼装装置完成一次动作循环。
74.重复步骤1-7,能够对断路器外壳进行循环的拼装。
75.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。