1.本实用新型涉及一种熔模铸造机械手制壳工装夹具,属于熔模铸造技术领域。
背景技术:
2.熔模铸造又称失蜡铸造,包括压蜡、修蜡、组树、沾浆、熔蜡、浇铸金属液及后处理等工序。失蜡铸造是用蜡制作所要铸成零件的蜡模,然后蜡模上涂以泥浆,这就是泥模。泥模晾干后,放入热水中将内部蜡模熔化。将熔化完蜡模的泥模取出再焙烧成陶模。一经焙烧。一般制泥模时就留下了浇注口,再从浇注口灌入金属熔液,冷却后,所需的零件就制成了。
3.原本沾浆淋砂需要手工操作,既不方便又不安全,沾浆淋砂后的蜡模树对周围的环境及人体产生不利影响,劳动条件恶劣。
技术实现要素:
4.根据以上现有技术中的不足,本实用新型要解决的技术问题是:为解决上述问题之一,提供一种熔模铸造机械手制壳工装夹具。
5.本实用新型所述的熔模铸造机械手制壳工装夹具,其特征在于:包括机械手连接板,所述机械手连接板的背面与机械手连接,所述机械手连接板的正面两端分别设置有一蜡模杆夹持组件,所述蜡模杆夹持组件包括固定在机械手连接板表面的旋转驱动机构,所述旋转驱动机构的动力输出轴上安装有夹持钩,旋转驱动机构驱动夹持钩旋转,旋转驱动机构上还安装有推拉机构,推拉机构的伸缩端设置有压紧头,推拉机构伸长状态下压紧头抵接在与蜡模杆的顶端。
6.优选地,所述旋转驱动机构包括固定在机械手连接架背面的减速机,所述减速机的动力输入轴与固定在减速机外壳上的电机动力连接,所述减速机为空心输出轴式减速机,其动力输出轴为空心动力输出轴,空心动力输出轴的中心线与电机动力输出轴的中心线垂直,空心动力输出轴贯穿机械手连接架后与夹持钩连接,推拉机构为夹持油缸,所述夹持油缸固定在减速机顶部的外壳上,其活塞杆贯穿减速机外壳、空心动力输出轴内孔延伸至夹持钩中部。
7.优选地,所述夹持钩包括相互平行的钩体a及钩体b,所述钩体a及钩体b的上端分别固定在连接板的两端,连接板固定在减速机的空心动力输出轴上,其中部具有供活塞杆贯穿的贯穿孔,钩体a远离连接板的一端具有挂槽a,所述钩体b远离夹持连接板的一端具有挂槽b,夹持油缸伸缩杆伸长状态下压紧头抵接在蜡模杆的顶部,钩挂横杆的两端分别放在挂槽a及挂槽b中。
8.优选地,所述压紧头为柱状结构,其上下两端分别设置上连接孔及下限位孔,压紧头通过上连接孔安装在夹持油缸伸缩杆上,下限位孔内径略大于蜡模杆的外径,蜡模杆的上端插入限位孔中。
9.优选地,所述钩体a包括与连接板相垂直的钩体主板,钩体主板的底端具有与钩挂
横杆配合的钩头,钩头上具有挂槽a,钩体a和钩体b结构相同,钩体a的钩体主板与钩体b钩体主板之间具有预设距离,该预设距离大于钩挂横杆的长度,钩体a的钩头与钩体b的钩头连接有钩头间定位板。
10.与现有技术相比,本实用新型具有以下有益效果:本实用新型所述的熔模铸造机械手制壳工装夹具,通过与现有机械手臂相结合,可以夹持蜡模树进行沾浆淋砂作业,并模拟人工运浆动作,实现自动化作业。
附图说明
11.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
12.图1为本实用新型的结构示意图一;
13.图2为本实用新型的结构示意图二;
14.图3为本实用新型的结构示意图三;
15.图4为蜡模杆夹持组件的结构示意图一;
16.图5为蜡模杆夹持组件的结构示意图二;
17.图6为工作状态示意图;
18.图中:1、机械手连接架2、夹持油缸3、夹持钩3.1、钩体a3.2、钩体b3.3、挂槽a3.4、挂槽b3.5、连接板3.6、钩头间定位板4、压紧头5、蜡模杆6、钩挂横杆7、减速机8、电机。
具体实施方式
19.下面结合附图对本实用新型做进一步描述:
20.以下通过具体实施例对本实用新型作进一步说明,但不用以限制本实用新型,凡在本发明精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
21.实施例
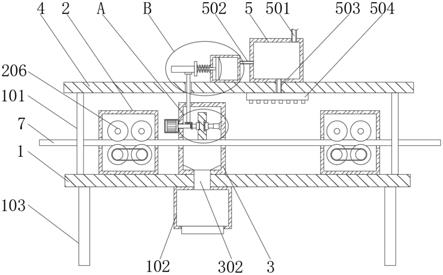
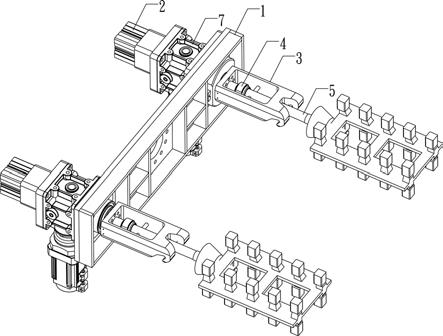
22.如图1-6所示,所述熔模铸造机械手制壳工装夹具,包括机械手连接板1,所述机械手连接板1的背面与机械手连接,所述机械手连接板1的正面两端分别设置有一蜡模杆夹持组件,所述蜡模杆夹持组件包括固定在机械手连接板1表面的旋转驱动机构,所述旋转驱动机构的动力输出轴上安装有夹持钩3,旋转驱动机构驱动夹持钩3旋转,旋转驱动机构上还安装有推拉机构,推拉机构的伸缩端设置有压紧头4,推拉机构伸长状态下压紧头4抵接在与蜡模杆的顶端。
23.本实施例中,所述旋转驱动机构包括固定在机械手连接架1背面的减速机7,所述减速机7的动力输入轴与固定在减速机7外壳上的电机8动力连接,所述减速机7为空心输出轴式减速机,其动力输出轴为空心动力输出轴,空心动力输出轴的中心线与电机动力输出轴的中心线垂直,空心动力输出轴贯穿机械手连接架1后与夹持钩3连接,推拉机构为夹持油缸2,所述夹持油缸2固定在减速机7顶部的外壳上,其活塞杆贯穿减速机外壳、空心动力输出轴内孔延伸至夹持钩3中部;所述夹持钩3包括相互平行的钩体a3.1及钩体b3.2,所述
钩体a3.1及钩体b3.2的上端分别固定在连接板3.5的两端,连接板3.5固定在减速机7的空心动力输出轴上,其中部具有供活塞杆贯穿的贯穿孔,钩体a3.1远离连接板3.5的一端具有挂槽a3.3,所述钩体b3.2远离夹持连接板3.5的一端具有挂槽b3.4,夹持油缸2伸缩杆伸长状态下压紧头4抵接在蜡模杆5的顶部,钩挂横杆6的两端分别放在挂槽a3.3及挂槽b3.4中;所述压紧头4为柱状结构,其上下两端分别设置上连接孔及下限位孔,压紧头4通过上连接孔安装在夹持油缸2伸缩杆上,下限位孔内径略大于蜡模杆5的外径,蜡模杆5的上端插入限位孔中;所述钩体a包括与连接板3.5相垂直的钩体主板,钩体主板的底端具有与钩挂横杆6配合的钩头,钩头上具有挂槽a3.3,钩体a和钩体b结构相同,钩体a的钩体主板与钩体b钩体主板之间具有预设距离,该预设距离大于钩挂横杆6的长度,钩体a的钩头与钩体b的钩头连接有钩头间定位板3.6。
24.本实用新型的工作原理:蜡模树上具有蜡模杆5,蜡模杆5上具有两个钩挂横杆6,制壳线采用上层的钩挂横杆6定位,本新型采用下层的钩挂横杆6定位。
25.本实用新型可将制壳线上未沾浆淋砂的蜡模树取下,并夹持,与现有机械手臂相结合,可以夹持蜡模树进行沾浆淋砂作业,并模拟人工运浆动作,实现自动化作业。沾浆淋砂作业完成后,并再次悬挂到制壳线上。
26.具体流程为:1.承接制壳线送料,利用机械手臂将夹持钩3调为水平状态,挂槽a3.3及挂槽b3.4开口朝上,下层的钩挂横杆6两端分别放在挂槽a3.3及挂槽b3.4中,夹持钩3通过机械手臂竖向托举,将制壳线上未沾浆淋砂的蜡模树取下;
27.2.机械手臂动作,利用机械手臂将夹持钩3调为竖向状态,蜡模杆5在重力下保持竖向,蜡模杆5处于钩体a3.1与钩体b3.2之间,并抵接在钩头间定位板3.6上,此时控制夹持油缸2的活塞杆伸长,压紧头4对蜡模杆5的顶端完成定位,完成夹持动作;
28.3.机械手臂控制蜡模树动作,在相应设备内进行沾浆淋砂作业,减速机7可带动蜡模树旋转,机械手臂可模拟人工运浆动作;
29.4.沾浆淋砂作业完成后,利用机械手臂将夹持钩3调为竖向状态,此时控制夹持油缸2的活塞杆缩短,压紧头4解除对蜡模杆5的顶端的限制,解除限制后再利用机械手臂将夹持钩3调为水平状态,挂槽a3.3及挂槽b3.4开口朝上,在重力作用下夹持钩3与蜡模树相对旋转;
30.5.最后通过机械手臂,将已沾浆淋砂的蜡模树从新挂在制壳线上,进入下一工序。
31.以上显示和描述了本实用新型的基本原理、主要特征以及本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。