1.本实用新型涉及智能教育领域,尤其涉及一种智能教育机器人。
背景技术:
2.随着科技的发展,智能教育已经逐渐渗透到学习当中,智能教育的普及可以大大提高教学的效率,而且能够激发孩子的学习兴趣,有利于孩子的成长,而智能教育机器人也应运而生。
3.现有的智能教育机器人,虽然能够实现智能教育的目的,但是往往头部和移动方向不易保持一致,机器人在移动时不美观,故需要一种智能教育机器人以解决上述问题。
技术实现要素:
4.本实用新型实施例的目的在于提供一种智能教育机器人,旨在解决以下问题:现有的机器人头部朝向和轮子的转动方向不易保持一致,导致移动不美观。
5.本实用新型实施例是这样实现的,一种智能教育机器人,包括:机体,其内是空心结构,所述机体所开设得空腔两侧均开设有与外界连通的通口,机体空腔内还固定设置有隔板,隔板将机体内依次分隔为控制空腔和驱动空腔;控制机构,设置在机体所开设的控制空腔内,所述控制机构信息输入端由机体的控制空腔延伸至机体外,控制机构的信息输出端穿过隔板延伸至机体所开设的驱动空腔内;驱动机构,安装在机体的驱动空腔内,驱动机构的两侧输出端穿过机体所开设的通口,控制机构可控制驱动机构的开闭,所述驱动机构两侧输出端分别固定由设置在机体外的机器人头部以及转向轮。
6.优选地,所述控制机构包括:供电电池,固定设置在机体的控制空腔内,供电电池的充电端延伸至机体外;控制模块,设置在供电电池一侧,所述控制模块上还连接由延伸至机体外的控制面板,控制模块、供电电池以及驱动机构通过导线进行导线进行连接。
7.优选地,所述控制模块上还设置有喇叭以及可接收外界声音的麦克风,麦克风可接收外界音源经控制模块处理后经喇叭发出声音。
8.优选地,所述驱动机构包括:动力件,设置在驱动空腔内且与隔板固定连接,所述动力件通过导线和控制机构连接;第一锥齿轮,与动力件输出轴连接,所述第一锥齿轮一侧啮合有改变传动方向的第二锥齿轮,第二锥齿轮通过其转轴连接有第三锥齿轮,第三锥齿轮啮合有改变动力传动方向的第四锥齿轮;连接件,其一端与第四锥齿轮转轴连接,所述动力件滑动穿过隔板,所述连接件上还固定有限制连接件滑动的挡板;旋转组件,与连接件设置在控制空腔的一端连接,所述旋转组件与设置在机体外的转向轮固定连接。
9.优选地,所述旋转组件包括:齿环,其上开设有凹槽,所述齿环非凹槽一面固定设置有稳定块,齿环通过稳定块与转向轮连接,齿环可带动转向轮转动;齿轮,设置在齿环所开设的凹槽内且与齿环啮合,所述齿轮转轴与连接件设置在控制空腔内的一端固定连接,齿轮可带动齿环转动。
10.本实用新型提供的智能教育机器人不仅可以实现智能教育的目的,而且可以随时
保持头部和移动方向的一致性,大大增加了机器人的美观度,使用简单,实用性较强。
附图说明
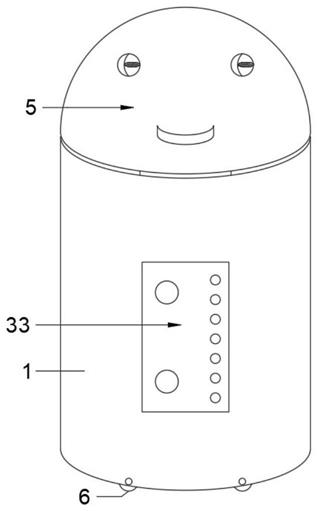
11.图1为智能教育机器人外观示意图。
12.图2为智能教育机器人的结构示意图。
13.图3为智能教育机器人的旋转组件示意图。
14.附图中:1-机体,2-隔板,3-控制机构,4-驱动机构,5-机器人头部,6-转向轮,31-供电电池,32-控制模块,33-控制面板,321-喇叭,322-麦克风,41-动力件,42-第一锥齿轮,43-第二锥齿轮,44-第三锥齿轮,45-第四锥齿轮,46-连接件,47-挡板,48-旋转组件,481-齿环,482-稳定块,483-齿轮。
具体实施方式
15.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不限定本实用新型。
16.以下结合具体实施例对本实用新型的具体实现进行详细描述。
17.请参阅图1和图2,本实用新型实施例提供的一种智能教育机器人,所述智能教育机器人包括:
18.机体1,其内是空心结构,所述机体1所开设得空腔两侧均开设有与外界连通的通口,机体1空腔内还固定设置有隔板2,隔板2将机体1内依次分隔为控制空腔和驱动空腔;控制机构3,设置在机体1所开设的控制空腔内,所述控制机构3信息输入端由机体1的控制空腔延伸至机体1外,控制机构3的信息输出端穿过隔板2延伸至机体1所开设的驱动空腔内;驱动机构4,安装在机体1的驱动空腔内,驱动机构4的两侧输出端穿过机体1所开设的通口,控制机构3可控制驱动机构4的开闭,所述驱动机构4两侧输出端分别固定由设置在机体1外的机器人头部5以及转向轮6。
19.本实施例在具体使用时,首先将控制机构3充满电,随后使用者可通过控制机构3开启该智能教育机器人,使用者可通过控制机构3向该机器人下达移动指令,在控制机构3的作用下,驱动机构4可带动机器人头部5机转向轮6转动到将要移动的方向上,然后转向轮6可带动机体1进行移动,当该机器人运动到合适位置时,使用者可通过语音向控制机构3发号施令,控制机构3接收到命令时,会经过分析后再通过语音发送出来,从而可进行智能学习。
20.如图2所示,作为本实用新型的一种优选实施例,所述控制机构3包括:供电电池31,固定设置在机体1的控制空腔内,供电电池31的充电端延伸至机体1外;控制模块32,设置在供电电池31一侧,所述控制模块32上还连接由延伸至机体1外的控制面板33,控制模块32、供电电池31以及驱动机构4通过导线进行导线进行连接。
21.本实施例在具体使用时,首先通过电源对供电电池31充电,充电完毕后,当需要移动该机器人时,通过控制面板33向控制模块32发出指令,控制模块32将开启驱动机构4,驱动机构4可带动该机器人的头部和转向轮6进行转向,转到合适的方位时,控制模块32将驱动机构4关闭,可通过转向轮6对机器人进行移动。
22.如图2所示,作为本实用新型的一种优选实施例,所述控制模块32上还设置有喇叭321以及可接收外界声音的麦克风322,麦克风322可接收外界音源经控制模块32处理后经喇叭321发出声音。
23.在进行学习时,麦克风322可接收来自使用者的指令,控制模块32接收到指令后对指令集进行分析,随后经喇叭321发出,从而可起到智能学习的效果。
24.如图2所示,作为本实用新型的一种优选实施例,所述驱动机构4包括:动力件41,设置在驱动空腔内且与隔板2固定连接,所述动力件41通过导线和控制机构3连接;第一锥齿轮42,与动力件41输出轴连接,所述第一锥齿轮42一侧啮合有改变传动方向的第二锥齿轮43,第二锥齿轮43通过其转轴连接有第三锥齿轮44,第三锥齿轮44啮合有改变动力传动方向的第四锥齿轮45;连接件46,其一端与第四锥齿轮45转轴连接,所述动力件46滑动穿过隔板2,所述连接件46上还固定有限制连接件46滑动的挡板47;旋转组件48,与连接件46设置在控制空腔的一端连接,所述旋转组件48与设置在机体1外的转向轮6固定连接。
25.本实施例在具体使用时,控制机构有3可开启动力件41,动力件41输出轴在带动机器人头部5转动的同时带动第一锥齿轮42转动,第一锥齿轮42转动第二锥齿轮43转动,第二锥齿轮43转动带动第三锥齿轮44转动,第三锥齿轮44转动带动第四锥齿轮45转动,第四锥齿轮45转动通过连接件46带动旋转组件48转动,从而可带动转向轮6转动和机器人头部相同的方位,挡板47可防止连接件46移动。
26.如图3所示,作为本实用新型的一种优选实施例,所述旋转组件48包括:齿环481,其上开设有凹槽,所述齿环481非凹槽一面固定设置有稳定块482,齿环481通过稳定块482与转向轮6连接,齿环481可带动转向轮6转动;齿轮483,设置在齿环481所开设的凹槽内且与齿环481啮合,所述齿轮483转轴与连接件46设置在控制空腔内的一端固定连接,齿轮483可带动齿环481转动。
27.在连接件46的带动下,连接件46转动可带动齿轮483转动,齿轮483转动带动齿环481以稳定块482为中心转动,从而保证了齿环481转动的稳定,齿环481转动可通过稳定块482带动转向轮6转动,从而保证了机器人头部5和转向轮6转动方位的一致性。
28.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。