1.本技术实施例涉及半导体制造领域,涉及但不限于一种材料瓶的储存设备。
背景技术:
2.半导体制造工艺中可能需要各种液态材料,例如:光刻胶、清洗剂等等。现有材料瓶无论是放在备品室的备品柜中还是放在机台端的化学品柜中,一个柜体中均放置了各种型号的材料瓶。各种型号的材料瓶混在一起,并且柜体中的储存格为开放式的,人员可以随意的拿取材料瓶,这会产生误拿的风险,用错材料甚至会产生严重的mo(missing operation,误操作)事件。
技术实现要素:
3.有鉴于此,本技术实施例提供一种材料瓶的储存设备,所述储存设备包括:
4.用于储存材料瓶的储存格;所述储存格的上方具有开口;所述材料瓶为瓶身上具有标识码的化学制剂瓶;
5.识别组件,位于与所述储存格内的材料瓶的标识码的对应位置,用于扫描所述储存格内材料瓶的所述标识码;
6.伸缩组件,位于所述储存格的所述开口处;所述伸缩组件处于伸长状态时用于阻挡所述材料瓶进出所述储存格;
7.其中,所述识别组件扫描所述标识码得到的扫码信息,用于确定所述伸缩组件的伸缩状态。
8.在一些实施例中,所述伸缩组件处于缩短状态时,所述材料瓶能够移入或移出所述储存格。
9.在一些实施例中,所述伸缩组件包括:气缸;所述气缸包括伸缩部;其中,所述伸缩部的所述伸长状态和所述缩短状态对应所述气缸内的气体量。
10.在一些实施例中,所述气缸还包括:
11.第一气体仓和第二气体仓;其中,所述第一气体仓的气体量大于第一阈值且第二气体仓的气体量小于第二阈值的状态下,所述气缸的伸缩部处于伸长状态;所述第一气体仓的气体量小于所述第一阈值且所述第二气体仓的气体量大于所述第二阈值的状态下,所述气缸的伸缩部处于缩短状态。
12.在一些实施例中,所述伸缩组件,还包括:
13.第一控制阀,分别与气源和所述气缸通过通气管连接;所述第一控制阀用于控制所述气源与所述气缸之间的气体流通方向;其中,所述气体流通方向与所述气缸的伸缩部的运动方向对应;所述气源用于提供压缩空气。
14.在一些实施例中,所述第一控制阀与所述第一气体仓通过第一通气管连接;所述第一控制阀与所述第二气体仓通过第二通气管连接;
15.所述第一控制阀处于第一状态时,所述第一气体仓的气体通过所述第一通气管流
向所述第一控制阀,且所述气源提供的压缩空气通过所述第二通气管流向所述第二气体仓;
16.所述第一控制阀处于第二状态时,所述第二气体仓的气体通过所述第二通气管流向所述第一控制阀,且所述气源提供的压缩空气通过所述第一通气管流向所述第一气体仓。
17.在一些实施例中,所述伸缩组件,还包括:
18.第二控制阀,连接在所述第一控制阀与所述气缸之间的通气管上;所述第二控制阀用于通过调整所述通气管上气体的流速或流量,控制所述气缸的伸缩部的运动速度。
19.在一些实施例中,所述伸缩组件,包括:
20.位置检测单元,位于所述伸缩组件的相邻位置,用于检测所述伸缩组件的伸缩状态。
21.在一些实施例中,所述储存设备还包括:
22.控制单元,分别与所述识别组件、伸缩组件连接;用于根据所述扫码信息,控制所述伸缩组件的伸缩状态。
23.在一些实施例中,所述储存设备还包括:
24.搬送装置,位于所述储存格外部,用于在所述伸缩组件处于缩短状态时,将材料瓶移入所述储存格或将所述储存格内的材料瓶移出所述储存格。
25.在本技术实施例中,材料瓶的储存格对应安装有伸缩组件和识别组件,通过识别组件可以扫描材料瓶上的标识码,伸缩组件则可以根据扫描组件扫描标识码得到的扫码信息,确定是否需要伸长阻挡材料瓶的进出,如此,可以减少误操作换错材料瓶的情况。
附图说明
26.图1为本技术实施例提供的一种材料瓶的储存设备的结构示意图;
27.图2为本技术实施例提供的一种伸缩组件的结构示意图;
28.图3为本技术实施例提供的另一种伸缩组件的结构示意图;
29.图4为本技术实施例提供的又一种伸缩组件的结构示意图;
30.图5为本技术实施例提供的又一种伸缩组件的结构示意图;
31.图6为本技术实施例提供的另一种材料瓶的储存设备的结构示意图;
32.图7为本技术实施例提供的又一种材料瓶的储存设备的结构示意图;
33.图8为现有技术中的一种材料瓶的储存设备的结构示意图;
34.图9为本技术实施例提供的一种材料瓶的包装图;
35.图10为一实施例中提供的一种材料瓶的储存设备的结构示意图;
36.图11为一实施例中半导体制造工艺中的机台端材料瓶更换步骤的流程图;
37.图12为人员打开机台端材料瓶储存格的示意图;
38.图13为材料瓶瓶盖逆时针方向拧下的示意图;
39.图14为更换备品材料瓶的示意图;
40.图15为材料瓶瓶盖顺时针方向拧紧的示意图;
41.图16为错误更换备品材料瓶的示意图;
42.图17为材料瓶可以取出的示意图;
43.图18为材料瓶无法取出的示意图;
44.图19为本技术实施例提供的又一种材料瓶的储存设备的结构示意图。
具体实施方式
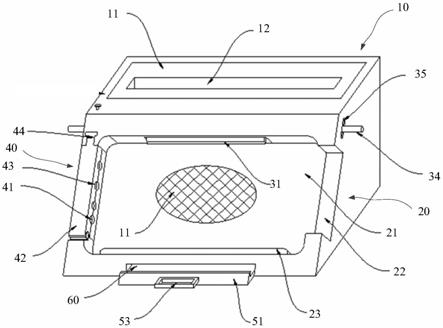
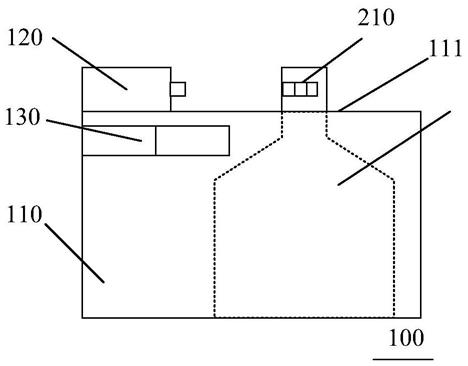
45.如图1所示,本技术实施例提供一种材料瓶的储存设备100,包括:用于储存材料瓶200的储存格110;所述储存格110的上方具有开口111;所述材料瓶200为瓶身上具有标识码210的化学制剂瓶;识别组件120,位于与所述储存格110内的材料瓶200的标识码210的对应位置,用于扫描所述储存格110内材料瓶200的所述标识码210;伸缩组件130,位于所述储存格110的所述开口111处;所述伸缩组件130处于伸长状态时用于阻挡所述材料瓶200进出所述储存格110;其中,所述识别组件120扫描所述标识码210得到的扫码信息,用于确定所述伸缩组件130的伸缩状态。
46.在本技术实施例中,上述材料瓶的储存设备可以为半导体制程设备的附属设备,用于存储半导体制程中所需使用的材料,储存设备内的储存格可以为一个也可以为多个。材料瓶位于储存格中时,可以供半导体制程设备使用材料瓶中的材料,材料耗尽时,则需要更换储存格中的材料瓶。或者,上述储存设备也可以为用于储存备品的独立的储存设备,当一些制程设备需要更换材料时,则需要将材料瓶取出储存格;在需要储存备品时,则需要将新的材料瓶移入储存格。
47.在本技术实施例中,储存格的上方具有开口,开口大小不做限制但至少能使材料瓶方便的从储存格上方拿取。材料瓶为瓶身上具有标识码的化学制剂瓶。化学试剂可以是腐蚀性化学试剂,也可以是半导体用光刻胶,总之是一些需要管控,防止误拿的试剂。
48.在储存格内取放材料瓶时,伸缩组件处于缩短状态,用于允许材料瓶移入储存格。伸缩组件可以为由气压控制的可伸缩气缸、由电动机械马达控制的伸缩件或者由弹簧等装置构成的可伸缩结构等。例如,可伸缩气缸可以包括伸缩杆、气体仓以及气压调节装置等。
49.识别组件可以位于储存格上的开口处或者储存格外,用于扫描位于储存格内的材料瓶上的标识码。例如,储存格的高度小于材料瓶的高度,材料瓶的部分瓶身位于储存格内时,其瓶颈及瓶口部分可以裸露在储存格开口外,如图所示。识别组件则在储存格外通过扫描材料瓶瓶颈上的标识码来获取扫码信息。材料瓶上的标识码可以为条形码、二维码或其他id标识等,识别组件可以通过图像采集或者红外线扫描等方式识别标识码,得到上述扫码信息。
50.在另一实施例中,识别组件还可以用于识别储存格外的材料瓶瓶身上的标识码。例如,当需要将新的材料瓶储存至储存格内时,先在将材料瓶移动至储存格外的指定位置。识别组件识别该新的材料瓶上的标识码后,确定是否允许将该材料瓶移动至储存格内。示例性地,此时控制伸缩组件缩短,则新的材料瓶可以移动至储存格内;若伸缩组件伸长,则新的材料瓶被阻挡在储存格外,不允许移入储存格。
51.识别组件扫描所述标识码得到的扫码信息,用于确定所述伸缩组件的伸缩状态。扫码信息得到的是标识码的内容。扫码信息可以包括材料瓶的型号、批次、类别以及厂家信息等。根据扫码信息判断材料瓶是否为所需的材料瓶,根据判断结果,决定伸缩组件处于伸长状态还是缩短状态。例如,识别组件通过比较第一次识别的材料瓶的标识码和第二次(第三次,依次类推)识别的材料瓶的标识码,用于判断材料瓶中是否属于相同规格的材料,若
是,伸缩组件由伸长状态变成缩短状态,若不是,伸缩组件则保持伸长状态,禁止材料瓶被取出。
52.需要说明的是,这里所提及的“第一次识别的材料瓶”可以是用于录入符合需求的标准信息的材料瓶,例如,在未录入过标准信息的识别组件对应的储存格内放入材料瓶,此时通过识别组件识别材料瓶上标识码的信息,作为上述标准信息。后续识别组件则以该标准信息为准,若识别到的标识码与该标准信息匹配,则伸缩组件缩短,可以取放材料瓶;若识别到的标识码与该标准信息不匹配,则伸长伸缩组件,阻挡材料瓶进出储存格。
53.又如,识别组件扫描材料瓶上的标识码,识别组件根据标识码中的信息,判断当前识别的标识码是否属于符合需求的标识码(例如,带有指定产品批次标记),进而确定是否需要阻挡材料瓶进出储存格。
54.示例性地,第一次储存材料瓶时,储存格内没有材料瓶时,伸缩组件处于缩短状态,便于识别组件识别第一次放入储存格的材料瓶的标识码后将材料瓶放入。再次取出材料瓶或者当储存格内的材料瓶耗尽后,需要将新的材料瓶替换到储存格内时,使用储存格上的识别组件识别新的材料瓶的条形码或二维码或id,再将本次识别的信息与第一次在储存格内储存材料瓶时记录的到的信息两者对比。若两次信息一致,则伸缩组件由伸长状态变成缩短状态用于允许已耗尽的材料瓶从储存格中拿走。若两次信息不一致,则伸缩组件继续保持伸长状态,阻挡已耗尽的材料瓶从储存格中取出。
55.如此,在从储存格中移入或移出材料瓶时,可以使用识别装置对材料瓶的标识码进行识别,利用识别到的信息,判断材料瓶是否为所需的材料瓶,根据判断结果对应的伸缩组件的状态是伸长还是缩短,决定材料瓶是否能放入到储存格中或者决定材料瓶是否能从储存格中取出。从系统层面上减少了因人员错误拿取材料瓶,导致产品生产出错的情况。
56.在本技术实施例中,所述伸缩组件处于缩短状态时,所述材料瓶能够移入或移出所述储存格。
57.伸缩组件处于缩短状态时,此时的伸缩组件不再限制材料瓶的活动,给材料瓶提供了活动空间,不会阻挡材料瓶移入和移出储存格。
58.示例性地,第一次储存材料瓶时,储存格内没有材料瓶时,伸缩组件处于缩短状态,便于识别组件识别第一次放入储存格的材料瓶的标识码后将材料瓶移入。
59.示例性地,识别组件通过比较第一次识别的材料瓶的标识码和第二次(第三次,依次类推)识别的材料瓶的标识码,用于判断材料瓶中是否属于相同规格的材料,若是,伸缩组件由伸长状态变成缩短状态,便于将材料瓶移入储存格中。
60.又如,当材料瓶需要从储存格内移出的时候,识别组件判断材料瓶是否满足移出的条件,若是,伸缩组件由伸长状态变成缩短状态,便于将材料瓶移出储存格中。
61.当材料瓶因为使用完毕需要从储存格内移出的时候,伸缩组件由伸长状态变成缩短状态,便于将材料瓶移出储存格中。
62.如图2所示,在本技术实施例中,所述伸缩组件130包括:气缸;所述气缸包括伸缩部131;其中,所述伸缩部131的所述伸长状态和所述缩短状态对应所述气缸内的气体量。
63.本技术实施例中的伸缩组件130至少包括一个气缸,也可以使用多个气缸,在此不做限制。气缸内至少有一个伸缩部,也可以使用多个伸缩部,在此不做限制。
64.伸缩部131的伸缩状态分为伸长状态和缩短状态。伸缩部131的伸长状态和缩短状
态与其对应气缸内的气体量有关。例如,气缸内的气体量越大,可以将气缸的伸缩部推出,使伸缩部处于伸长状态。气缸内的气体量越小,可以将气缸的伸缩部拉回,使伸缩部处于缩短状态。
65.当气缸内的气体量使得伸缩部处于伸长状态时(例如,气缸内的其气体量大于第一阈值),即伸缩组件处于伸长状态,此时的伸缩组件限制材料瓶的活动。材料瓶不能够移入或移出所述储存格。
66.例如,材料瓶已经放入储存格中,材料瓶被伸缩组件卡住,阻挡材料瓶移出储存格。
67.材料瓶要放入储存格中,伸缩组件伸出,材料瓶没有其他空间进入储存格中,阻挡材料瓶移入储存格中。
68.当气缸内的气体量使得伸缩部处于缩短状态时(例如,气缸内的其体量小于第二阈值),即伸缩组件处于缩短状态,此时的伸缩组件不限制材料瓶的活动。材料瓶能够移入或移出所述储存格。
69.又如,第一次储存材料瓶时,储存格内没有材料瓶时,伸缩组件处于缩短状态,便于识别组件识别第一次放入储存格的材料瓶的标识码后将材料瓶移入。
70.识别组件通过比较第一次识别的材料瓶的标识码和第二次(第三次,依次类推)识别的材料瓶的标识码,用于判断材料瓶中是否属于相同规格的材料,若是,伸缩组件由伸长状态变成缩短状态,便于将材料瓶移入储存格中。
71.当材料瓶需要从储存格内移出的时候,识别组件判断材料瓶是否满足移出的条件,若是伸缩组件由伸长状态变成缩短状态,便于将材料瓶移出储存格中。
72.当材料瓶因为使用完毕需要从储存格内移出的时候,伸缩组件由伸长状态变成缩短状态,便于将材料瓶移出储存格中。
73.在本技术实施例中,如图2所示,气缸还包括:第一气体仓132和第二气体仓133;其中,所述第一气体仓132的气体量大于第一阈值且第二气体仓133的气体量小于第二阈值的状态下,所述气缸的伸缩部131处于伸长状态;所述第一气体仓132的气体量小于所述第一阈值且所述第二气体仓133的气体量大于所述第二阈值的状态下,所述气缸的伸缩部131处于缩短状态。
74.本技术实施例中的气缸包括第一气体仓和第二气体仓,例如,第一气体仓和第二气体仓由活塞分隔开,第一气体仓不包含活塞杆,第二气体仓包含活塞杆。
75.例如,当需要推动活塞杆,使气缸处于伸长状态时,第一气体仓的气体量大于第一阈值且第二气体仓的气体量小于第二阈值。
76.当需要拉回活塞杆,使气缸处于伸缩状态时,第一气体仓的气体量小于所述第一阈值且所述第二气体仓的气体量大于所述第二阈值。
77.第一阈值可以为推动活塞杆的推力值,第二阈值可以为拉回活塞杆的拉力值。
78.如图3所示,在本技术实施例中,所述伸缩组件130,还包括:
79.第一控制阀140,分别与气源和所述气缸通过通气管连接;所述第一控制阀140用于控制所述气源与所述气缸之间的气体流通方向;其中,所述气体流通方向与所述气缸的伸缩部131的运动方向对应;所述气源用于提供压缩空气。
80.第一控制阀可以为气控阀、机械阀和电磁阀。本技术实施例选用电磁阀。电磁阀上
设置有第一接口141、第二接口142、以及气源口143。电磁阀的第一接口141连接第一气体仓132,第二接口142连接第二气体仓133。气源口143连接气源。利用电磁阀的通电和断电状态来控制气源与气缸之间气体的流通方向,气体流通方向与所述气缸的伸缩部131的运动方向对应。
81.例如,气体流通方向从第一气体仓进,从第二气体仓出时,推动气缸伸缩部,使得气缸由缩短状态变为伸长状态。气体流通方向从第二气体仓进,从第一气体仓出时,反拉气缸伸缩部,使得气缸由从伸长状态变为缩短状态。气源为压缩气体,可以为压缩空气。
82.示例性地,当第一控制阀为通路时,气源内的气体经通气管进入第一气体仓,推动伸缩部,使得气缸由缩短状态变为伸长状态。第二气体仓内的气体经通气管排出。
83.当第一控制阀为开路时,气源内的气体经通气管进入第二气体仓,反拉伸缩部,使得气缸由伸长状态变为缩短状态。第一气体仓内的气体经通气管排出。
84.在本技术实施例中,如图3所示,所述第一控制阀140与所述第一气体仓132通过第一通气管151连接;所述第一控制阀140与所述第二气体仓133通过第二通气管152连接;
85.所述第一控制阀140处于第一状态时,所述第一气体仓132的气体通过所述第一通气管151流向所述第一控制阀140,且所述气源提供的压缩空气通过所述第二通气管152流向所述第二气体仓133;
86.所述第一控制阀140处于第二状态时,所述第二气体仓133的气体通过所述第二通气管152流向所述第一控制阀140,且所述气源提供的压缩空气通过所述第一通气管151流向所述第一气体仓132。
87.第一控制阀140可以为气控阀、机械阀和电磁阀。第一通气管的数量可以为一根也可以为多根,在此不做限制。第二通气管的数量可以为一根也可以为多根,在此不做限制。
88.示例性地,第一控制阀可以为电磁阀。电磁阀的第一状态为断电状态,电磁阀的第二状态为通电状态。
89.第一控制阀与第一气体仓之间通过第一通气管连接,第一控制阀与第二气体仓通过第二通气管连接,第一通气管与第二通气管内的气流方向相反。当第一通气管进气时,第二通气管排气;当第二通气管进气时,第一通气管排气。
90.当电磁阀通电时,气源经电磁阀的第一接口进入第一气管并输送至第一气体仓,并且当第一气体仓的气体量大于第一阈值且第二气体仓的气体量小于第二阈值时,推动伸缩部,使得气缸由缩短状态变为伸长状态。同时第二气体仓内的气体经第二接口输出至第二气管排出。
91.当电磁阀断电时,气源经电磁阀的第二接口进入第二气管并输送至第二气体仓,并且当第一气体仓的气体量小于所述第一阈值且第二气体仓的气体量大于所述第二阈值时,反拉气缸伸缩部,使得气缸由从伸长状态变为缩短状态。同时第一气体仓内的气体经第一接口输出至第一气管排出。
92.第一阈值可以为推动活塞杆的推力值,第二阈值可以为反推活塞杆的拉力值。
93.在本技术实施例中,如图4所示,所述伸缩组件130,还包括:
94.第二控制阀,连接在所述第一控制阀140与所述气缸之间的通气管上;所述第二控制阀用于通过调整所述通气管上气体的流速或流量,控制所述气缸的伸缩部131的运动速度。
95.第二控制阀为调节流速或流量的阀门,可以是调节阀、v型阀、角阀、针阀、蝶阀以及膜片阀等。
96.本技术实施例选用两个针阀,分别为第一针阀160和第二针阀161。第一针阀160安装在第一控制阀140与气缸之间的第一通气管151上用于通过调整第一通气管151上气体的流速,第二针阀161安装在第一控制阀140与气缸之间的第二通气管152上用于通过调整第二通气管152上气体的流速,气体的流速可以控制气缸的伸缩部131的运动速度。针阀的气体流通管路上设置有小的孔口,调节针状密封轴和孔口的距离就可以连续改变流路的导通率,以达到控制压缩气体流量的目的,进而控制气缸的伸缩部131的运动速度。
97.如图5所示,在本技术实施例中,所述伸缩组件130,包括:
98.位置检测单元,位于所述伸缩组件130的相邻位置,用于检测所述伸缩组件130的伸缩状态。
99.位置检测单元可以为位置传感器,位于伸缩组件130的相邻位置,位置传感器的数量至少为两个,本技术实施例选用两个位置传感器,分别为第一位置传感器170和第二位置传感器171。
100.示例性地,第一位置传感器安装在活塞的第一极限位置,第一极限位置对应伸缩组件处于完全缩短时活塞所在的位置。第二位置传感器安装在活塞的第二极限位置,第二极限位置对应伸缩组件处于完全伸长时活塞所在的位置。
101.当第一位置传感器和第二位置传感器均未检测到信号时,此时活塞既不在第一极限位置又不在第二极限位置时,若此时取出材料瓶,材料瓶有破损风险,伸缩组件需复位到完全伸长状态,避免材料瓶被非法取出。
102.在本技术实施例中,如图6所示,所述储存设备100还包括:
103.控制单元300,分别与所述识别组件120、伸缩组件130连接;用于根据所述扫码信息,控制所述伸缩组件130的伸缩状态。
104.本技术实施例还包括控制单元300,控制单元300包括存储器310、比较器320。识别组件120通过电路连接控制单元300,控制单元300通过电路连接伸缩组件130。
105.示例性地,控制单元中的存储器用于保存第一次在储存格内储存材料瓶时识别组件识别到的材料瓶信息。
106.控制单元中的存储器内可以预先存储需要对比标识信息。控制单元中的比较器将第一次在储存格内储存材料瓶时识别组件识别到的材料瓶信息与新的材料瓶的信息相比较。并输出比较结果。
107.控制单元中的比较器将识别组件识别到的信息与预先存储在存储器中的信息相比较。并输出比较结果。
108.当信息比较结果相同时或识别到了需要的信息时,控制单元输出信号给电磁阀,
109.当电磁阀断电时,气源经电磁阀的第二接口进入第二气管并输送至第二气体仓,并且当第一气体仓的气体量小于所述第一阈值且第二气体仓的气体量大于所述第二阈值时,反拉气缸伸缩部,使得气缸由从伸长状态变为缩短状态。同时第一气体仓内的气体经第一接口输出至第一气管排出。
110.当位置传感器检测到活塞在第一极限位置时,伸缩组件为完全缩短状态。此时可以将储存格内的材料瓶取出。
111.示例性地,当信息比较结果不相同时,控制单元输出信号给电磁阀,当电磁阀通电时,气源经电磁阀的第一接口进入第一气管并输送至第一气体仓,并且当第一气体仓的气体量大于第一阈值且第二气体仓的气体量小于第二阈值时,推动伸缩部,使得气缸由缩短状态变为伸长状态。同时第二气体仓内的气体经第二接口输出至第二气管排出。当位置传感器检测到活塞位于第二极限位置时,此时的伸缩组件为完全伸长状态。此时不可以将储存格内的材料瓶取出。
112.如图7所示,在本技术实施例中,所述储存设备100还包括:
113.搬送装置400,位于所述储存格110外部,用于在所述伸缩组件130处于缩短状态时,将材料瓶200移入所述储存格110或将所述储存格110内的材料瓶200移出所述储存格110。
114.搬送装置400可以包括机械手臂、真空吸盘。
115.例如,在不需要搬送时,搬送装置位于储存格的外部,当需要搬送时,搬送装置靠近材料瓶的瓶颈处,并夹住材料瓶向上搬出。搬送装置用于在伸缩组件处于缩短状态时,将材料瓶移入储存格或将储存格内的材料瓶移出所述储存格。
116.本技术实施例还提供如下示例:
117.半导体制造工艺中可能需要各种液态材料,例如:光刻胶、清洗剂等等。光刻胶是半导体光刻制程中使用的一种具有感光性的液态化学品,作为将电路图案从光罩转移到硅片上的介质。现有材料瓶无论是放在备品室的备品柜中还是放在机台端的化学品柜中,如图8所示,一个储存格110中均放置了各种型号的材料瓶200。以光刻胶为例,目前一台涂胶机最多可以配置10管光刻胶,用于多种工艺制程。如图9所示,不同光刻胶均使用同一规格比如:4l的玻璃瓶包装,并且同一厂家不同型号光刻胶标签外观相似,存在换错的风险。如图10所示,柜体中的储存格110为开放式的,人员可以随意的拿取材料瓶200,这会产生误拿的风险,用错材料甚至会产生严重的mo事件。
118.图11为现有技术中半导体制造工艺中的机台端材料瓶更换步骤的流程图,包括,
119.s1101、机台液位传感器报警,提醒更换材料瓶;
120.s1102、人员准备好备品材料瓶;
121.s1103、打开机台端材料瓶储存格,将待更换的材料瓶瓶盖拧下;
122.s1104、确认备品材料瓶和待更换的材料瓶品名、型号一致,换上备品材料瓶,拧紧瓶盖;
123.s1105、消除机台端液位报警信息。
124.当机台液位传感器报警时,提醒人员机台内储存格中的材料瓶需要进行更换。如图9所示,人员准备好备品材料瓶。如图12所示,人员打开机台端材料瓶储存格110,如图13所示,人员将储存格中待更换的材料瓶200的瓶盖逆时针方向拧下。如图14所示,确认备品材料瓶200和待更换的材料瓶200的品名、型号是否一致,换上备品材料瓶200,如图15所示,人员顺时针拧紧材料瓶200的瓶盖。将备品材料瓶放入储存格后,人员手动消除机台端液位报警信息。
125.通过以上步骤可以发现,现有更换步骤存在的问题包括:更换材料瓶的全部步骤均为人员手动操作。同一厂家生产的同一规格不同型号的材料瓶的外包装相似,需要依靠人员主动检测,仔细辨别型号,难以确保每次的正确更换。同一规格不同型号的材料瓶与瓶
盖也是通用的,无法从瓶盖处进行防呆。如图16所示,当需要对材料瓶a进行更换的时候,因为材料瓶a和材料瓶b,规格相同,包装相似,容易将材料瓶b更换进储存格100中。会出现换错事件。当发生换错材料瓶200的情况时,待更换的材料瓶200和备品材料瓶200内的材料液会在机台管路中混合,对产品的良率将会产生影响,并且这种影响无法在换错的第一时间被发现,当换错持续的时间越长,半导体厂家的损失也就失大。这是严重的mo事件。
126.本技术实施例提供了一种材料瓶的储存设备,用于更换材料瓶时的防呆,避免人为误操作导致换错的情形。
127.在储存格110内储存材料瓶时,材料瓶中可以是光刻胶、清洗液或者液晶等。伸缩组件130处于缩短状态,用于允许材料瓶移入储存格110。伸缩组件130包括伸缩部131。伸缩部131可以是气缸。如图17所示,伸缩部131是缩短状态时,材料瓶200可以取出。如图18所示,伸缩部131是伸长状态时,材料瓶200不可以取出。
128.如图19所示,使用对应储存格上安装的识别装置120,识别装置120可以为条形扫码器。识别装置120识别材料瓶上的标识码,标识码可以为条形码。识别装置120连接控制单元300,控制单元300连接伸缩组件130。控制单元300中的存储器310用于保存第一次在储存格内储存材料瓶时识别装置120识别到的材料瓶信息。此时的伸缩部131处于缩短状态。利用搬送装置或人员将材料瓶放置到上方具有开口的储存格内,完成放置后,储存格内的传感器探测到储存格内已经有材料瓶。控制单元300输出信号给第一控制阀151,第一控制阀151可以是电磁阀,当第一控制阀151通电时,气源经第一控制阀151的气源口143流入第一控制阀151的第一接口141进入第一气管151并输送至第一气体仓132,且第一气管151上装有第一第二控制阀160,第一第二控制阀160可以是针阀,用于调节气源流速,从而控制伸缩部131的运动速度。同时第二气体仓133内的气体经第二接口142输出至第二气管152排出。且第二气管152上装有第二第二控制阀161,第二第二控制阀161可以是针阀,用于调节气源流速,从而控制伸缩部131的运动速度。当第一气体仓132的气体量大于第一阈值且第二气体仓133的气体量小于第二阈值时,推动伸缩部131,使得气缸由缩短状态变为伸长状态。当第二位置传感器171检测到信号时,此时伸缩组件130为完全伸长状态。伸缩组件130的位置到达预定位置。
129.当机台端储存格的材料瓶耗尽后,机台的液位传感器检测到信号,机台端发出“材料瓶已经耗尽”的报警信息。此时需要将备品材料瓶替换到储存格中时,使用储存格上的识别装置120识别备品材料瓶的标识码,控制单元300的比较器320将本次识别的信息与第一次在储存格内储存材料瓶时记录到的信息进行对比。若比较器320判断两次信息内容一致,比较器320输出信号给第一控制阀,第一控制阀151断电,气源经第一控制阀151的气源口143流入第一控制阀151的第二接口142进入第二气管152并输送至第二气体仓133,并且当第一气体仓132的气体量小于所述第一阈值且第二气体仓133的气体量大于所述第二阈值时,反拉气缸伸缩部131,使得气缸由从伸长状态变为缩短状态。当第一位置传感器170检测到信号时,此时伸缩组件130为完全缩短状态。伸缩组件130的位置到达预定位置。此时允许将已耗尽材料瓶从储存格中拿走。
130.控制单元300中还包含计时器330,当计时器330超时,伸缩组件130未从完全伸长状态变为完全缩短状态或者未从完全缩短状态变为完全伸长状态,伸缩组件130需进行状态复位。
131.计时器330设定有伸缩部131的活塞136从第二位置传感器171到第一位置传感器170的预定时间。当预定时间到达后,若第一位置传感器170未检测到信号,伸缩部131未变成完全缩短状态,材料瓶无法从储存格中拿走。并且第一位置传感器170将发送信号给控制单元300,控制单元300输出信号给第一控制阀使伸缩部131的活塞136复位到第二传感器171的位置。
132.搬送装置或人员将机台储存格中的材料瓶移出后,再将材料瓶放入储存格后,清除机台端“材料瓶已经耗尽”的报警信息。控制单元300收到清除信号后,发送信号给第一控制阀140,第一控制阀140发送信号控制伸缩部131由缩短状态变成伸长状态。
133.当第二位置传感器171检测到信号时,此时伸缩组件130为完全伸长状态。储存格内的伸缩部131将持续保持完全伸长状态,直到需要将储存格内的材料瓶移出储存格时。
134.控制单元300中储存器310中的储存数据可以清除,清除后也可以重新写入数据。例如,当储存格中没有材料瓶的时候,可以清除储存器310中的数据。在储存格放入材料瓶之前,在储存器310中写入新的数据。
135.控制单元储存器310中的储存数据的清除和写入功能的权限比允许储存格内材料瓶的移出和移出权限要高。
136.应理解,说明书通篇中提到的“一个实施例”或一实施例”意味着与实施例有关的特定特征、结构或特性包括在本技术的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。应理解,在本技术的各种实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
137.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
138.以上所述,仅为本技术的实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。