技术特征:
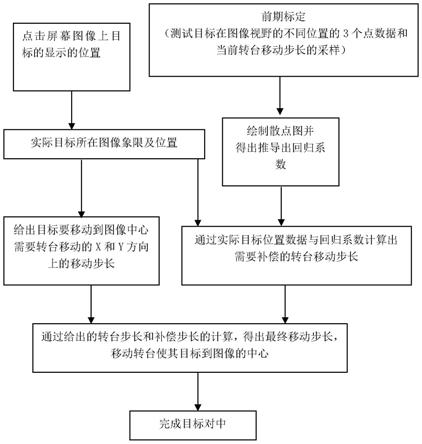
1.一种用于反狙击手机器人的光电跟踪图像对准方法,其特征在于,包括以下步骤:s1、采集多次测试目标所在象限的坐标点数据,并进行当前转台移动步长的采样;s2、绘制散点图,采用散点图进行线性回归分析,推导得到回归系数;s3、点击屏幕图像上目标显示位置,得到实际目标所在图像象限和位置;s4、给出目标移动到图像中心需要转台移动的x方向和y方向的转台移动步长;s5、根据实际目标位置数据和回归系数计算需要补偿的转台移动步长;s6、根据给出的x方向和y方向的转台移动步长以及补偿的转台移动步长,计算得到最终的移动步长,并移动转台将目标移动到图像中心。2.根据权利要求1所述的用于反狙击手机器人的光电跟踪图像对准方法,其特征在于,所述步骤s1在采集多次测试目标所在象限的坐标点数据,并进行当前转台移动步长的采样,包括:s1.1、采集多次测试目标数据,并采用慢时间降采样排列;s1.2、对采用慢时间降采样排列的目标数据进行预处理,包括数字解调、匹配和滤波处理。3.根据权利要求1所述的用于反狙击手机器人的光电跟踪图像对准方法,其特征在于,所述步骤s2中绘制散点图,采用散点图进行线性回归分析,推导得到回归系数,包括:采集多次测试目标所在的象限的坐标点与转台位置移动系数所形成的散点图推导出目标位置与转台移动系数落在图像的四个象限上运动系数关系系数;即通过绘制散点图,将4个象限分开进行4个线性回归分析,采用散点图进行线性回归分析,进行二维转台移动步长的预测或者映射。4.根据权利要求1所述的用于反狙击手机器人的光电跟踪图像对准方法,其特征在于,所述步骤s5根据实际目标位置数据和回归系数计算需要补偿的转台移动步长,包括:y
x
=k1
×
m
x2-k2
×
m
x
k3y
y
=k1
×
m
y2-k2
×
m
y
k3其中,y
x
为选中目标在某个象限的水平方向的二维转台步长补偿值;y
y
为选中目标在某个象限的垂直方向的二维转台步长补偿值;m
x
为选中目标在某个象限的水平方向的实际位置值;m
y
为选中目标在某个象限的垂直方向的实际位置值;k1,k2,k3为回归系数。5.根据权利要求4所述的用于反狙击手机器人的光电跟踪图像对准方法,其特征在于,回归系数的求解,包括以下步骤:s5.1、根据实际目标位置数据和回归系数构建二维转台步长补偿模型:y=k1
×
m
2-k2
×
m k3选取若干组(yn,mn),其中,n为数量,yn为作为结果输出,mn为输入,并得到若干组回归系数k1
i
、k2
i
、k3
i
,其中,k1
i
、k2
i
和k3
i
分别为求解得到的第i组系数,i=1、2、
…
n,n≥7000000;s5.2、在n组系数k1
i
、k2
i
、k3
i
中随机选取w1组系数k1
j
、k2
j
、k3
j
,j=1、2、
…
w1,1000≤w1≤n,将w组系数分别带入模型中,得到:y
j
=k1
j
×
m
j2-k2
j
×
m
j
k3
j
其中,y
j
和m
j
分别为k1
j
、k2
j
、k3
j
对应下的模型的输出和输入;s5.3、计算目标误差函数z:
其中,z1为随机组w1对应下的目标误差函数。6.根据权利要求5所述的用于反狙击手机器人的光电跟踪图像对准方法,其特征在于,重复多次步骤s5.2和步骤s5.3,得到关于目标误差函数的数据集(z1,z2,
…
,zd),d为重复次数;对d组目标误差函数进行排序,筛选得到数据集中目标函数最小的zmin;并定义最小目标误差函数值zmin对应的系数k1
j
、k2
j
、k3
j
为最优解。
技术总结
本发明公开了一种用于反狙击手机器人的光电跟踪图像对准方法,包括S1采集多次测试目标所在象限的坐标点数据,并采样当前转台移动步长;S2绘制散点图,采用散点图进行线性回归分析,推导得到回归系数;S3点击屏幕图像上目标显示位置,得到实际目标所在图像象限和位置;S4给出目标移动到图像中心需要转台移动步长;S5根据实际目标位置数据和回归系数计算需要补偿的转台移动步长;S6计算得到最终的移动步长,并移动转台将目标移动到图像中心。本发明通过散点图采样方式来进行线性回归分析,基于获得的回归系数提高设备自动对准精度,可在发现目标后快速对目标进行对中瞄准,快速进行后面的打击或压制操作。后面的打击或压制操作。后面的打击或压制操作。
技术研发人员:黄强 唐剑 杨俊永 周勇 达君
受保护的技术使用者:绵阳久强智能装备有限公司
技术研发日:2021.12.13
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。