1.本发明是关于打磨装置技术领域,特别是关于一种箱体打磨用夹持变位装置以及箱体打磨方法。
背景技术:
2.钣金箱体通常需要进行里外打磨后投入使用,以免划伤使用者。现有技术中,钣金箱体的打磨通常是将钣金箱体水平放置在平台上,夹紧定位后再交给机器人自动打磨抛光。
3.现有技术的箱体打磨存在以下缺点:需要多次人工翻转箱体进行再定位,生产效率低下;存在多处自动打磨死角,需要补充后道工序进行人工打磨。
4.公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现要素:
5.本发明的目的在于提供一种箱体打磨用夹持变位装置,其能够实现箱体的自动翻转和自由定位,配合打磨头完成箱体内外打磨,提高生产效率。
6.为实现上述目的,本发明的实施例提供了一种箱体打磨用夹持变位装置,包括承载平台、机架、移动旋转组件以及夹持组件;所述承载平台上设置有可移动的用于定位箱体的定位组件;所述机架对称设置于所述承载平台的两侧;所述移动旋转组件配置于所述机架上;所述夹持组件配置于所述移动旋转组件上,且在所述移动旋转组件的作用下能靠近或远离所述承载平台;所述夹持组件至少包括相对设置的两个夹块,两个所述夹块之间的距离可调节,以夹紧或释放箱体。
7.在本发明的一个或多个实施方式中,所述箱体打磨用夹持变位装置还包括第一传动模组,所述第一传动模组设置于所述机架与所述承载平台之间,用以调整所述机架与所述承载平台在x轴方向上的相对位置。
8.在本发明的一个或多个实施方式中,所述第一传动模组包括第一轨道组以及第一驱动结构,所述机架配置于所述第一轨道组上,所述第一驱动结构作用于所述机架,驱动其在所述第一轨道组上移动以靠近或远离所述承载平台。
9.在本发明的一个或多个实施方式中,所述移动旋转组件包括第二传动模组以及旋转模组,所述第二传动模组设置于所述机架上,用以调节所述夹持组件在z轴方向上的移动,所述旋转模组设置于所述第二传动模组上且连接所述夹持组件,用以调节所述夹持组件旋转。
10.在本发明的一个或多个实施方式中,所述第二传动模组包括第二轨道组以及第二驱动结构,所述第二轨道组配置于所述机架上,所述旋转模组配置于所述第二轨道组上,所述第二驱动结构作用于所述旋转模组,驱动其在所述第二轨道组上移动。
11.在本发明的一个或多个实施方式中,所述夹持组件包括两条夹臂,两条所述夹臂
呈十字形设置,至少一条所述夹臂上设置有一组夹块组,所述夹块组包括相对设置的两个夹块,所述夹块均可移动设置于所述夹臂上,以夹紧或释放箱体。
12.在本发明的一个或多个实施方式中,两条所述夹臂上均设置有夹块组。
13.在本发明的一个或多个实施方式中,每个所述夹块上均设置有夹槽,所述夹槽的形状与所述箱体的顶角形状相适配,用以实现所述夹块对箱体顶角的定位夹紧功能。
14.在本发明的一个或多个实施方式中,所述承载平台上沿y轴方向开设有滑槽,所述定位组件可沿所述滑槽移动,以对置于所述承载平台上的箱体进行定位。
15.在本发明的一个或多个实施方式中,所述定位组件包括相对设置于所述滑槽两端的定位板,驱动所述定位板相互靠近以对所述箱体定位的第三驱动结构,所述定位板具有与所述箱体表面相贴合的定位面。
16.本发明一实施例还提供了一种箱体打磨方法,采用上述的箱体打磨用夹持变位装置,包括:将箱体吊装于承载平台上,定位组件对箱体进行夹紧定位;依次打磨箱体除底面外的侧表面;夹持组件运动至箱体位置,夹紧箱体的顶角并上升至合适位置,360度自由旋转且任意角度悬停,协同配合打磨头完成箱体内外打磨;夹持组件将箱体旋转后置于承载平台上,并撤回至安全距离,定位组件对箱体进行夹紧定位后打磨未打磨的底面,完成箱体整体打磨。
17.与现有技术相比,本发明实施方式的箱体打磨用夹持变位装置,其通过移动旋转组件以及夹持组件的设置,能够实现箱体的自动翻转和自由定位,配合打磨头完成箱体内外打磨,提高生产效率,节省人力成本。
18.本发明实施方式的箱体打磨用夹持变位装置,通过可移动的夹块夹持箱体的8个顶角,可适用于所有尺寸的机箱或机柜,适用性强。
附图说明
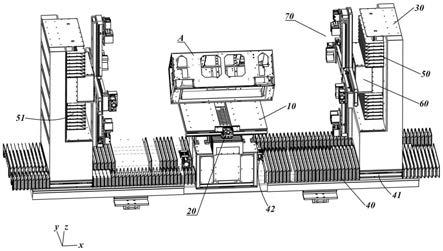
19.图1是本发明一实施方式的箱体打磨用夹持变位装置的立体结构图;
20.图2是本发明一实施方式的承载平台及定位组件结构图;
21.图3是本发明一实施方式的夹持组件结构图。
具体实施方式
22.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
23.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
24.如图1至图3所示,本发明一实施方式提供了一种箱体打磨用夹持变位装置,包括承载平台10、定位组件20、机架30、第一传动模组40、第二传动模组50、旋转模组60以及夹持组件70。定位组件20设置于承载平台10 上。机架30的数量有两个,分别设置于承载平台10的两侧。机架30与承载平台10之间设置有第一传动模组40。第一传动模组40能驱动机架30相对于承载平台10移动。第二传动模组50设置于机架30上,旋转模组60设置于第二传动模组50上,夹持组件70设置于旋转模组60上,夹持组件70分别在第二传动模组50和旋转模组
60的作用下,能在z轴方向上下移动且360 度旋转。
25.承载平台10用于承载钣金箱体a,以便打磨机器人进行箱体打磨。承载平台10具有一承载面11,承载面11上沿y轴方向开设有滑槽12,在一具体实施例中,滑槽12可在y轴方向上贯穿承载面11设置。滑槽12的设置为定位组件20预留出移动空间。
26.定位组件20设置于承载平台10上,定位组件20可沿滑槽12移动,以对置于承载面11上的箱体进行定位。定位组件20包括设置于承载平台10上且与滑槽12相对应的第三轨道组21;设置于第三轨道组21上,且位于滑槽 12两端的定位板22;驱动定位板22相互靠近以对箱体夹持定位的第三驱动结构23。定位板22具有与箱体表面相贴合的定位面。为了提高定位板22与箱体表面贴合的稳定性,定位面上可设置有增强摩擦力的硅胶软垫。
27.第一传动模组40设置于承载平台10的两端,用以调整机架30与承载平台10在x轴方向上的相对位置。第一传动模组40包括第一轨道组41以及第一驱动结构42,机架30配置于第一轨道组41上,第一驱动结构42作用于机架30,驱动其在第一轨道组41上移动,以靠近或远离承载平台10。
28.第二传动模组50设置于机架30上,且设置于机架30靠近承载平台10 的一侧,用以调节夹持组件70在z轴方向上的移动。旋转模组60用以调节夹持组件70旋转,以对夹持组件70夹持的箱体进行打磨角度调整。在本实施例中,每个机架30上均设有一第二传动模组50及一旋转模组60。
29.第二传动模组50包括第二轨道组51以及第二驱动结构,旋转模组60配置于第二轨道组51上,第二驱动结构作用于旋转模组30,驱动其在第二轨道组51上移动。
30.在本实施例中,夹持组件70包括两条夹臂71,两条夹臂71呈十字形设置,每条夹臂71上设置有一组夹块组,每组夹块组均包括相对设置的两个夹块72,四个夹块72均可移动设置于夹臂71上,由第四驱动结构73驱动,以靠近或远离十字形夹臂71的中心,以夹紧或释放箱体。每个夹块72上均设置有夹槽721,夹槽721的形状与箱体的顶角形状相适配,用以实现夹块72 对箱体顶角的定位夹紧功能。同样为了提高夹块72与箱体表面贴合的稳定性,夹块72的夹槽721内可设置有增强摩擦力的硅胶软垫。
31.在一具体实施例中,第一驱动结构42、第二驱动结构、第三驱动结构23 以及第四驱动结构73可为伺服驱动模组、气动驱动模组、液压驱动模组、以及电动驱动模组中的一种或多种。
32.由于第一驱动结构42及第四驱动结构73可分别驱动机架30及夹块72 在第一轨道组41及夹臂71上移动,所以本箱体打磨用夹持变位装置可以适用于不同尺寸的机柜的夹紧及打磨。
33.本发明一实施例还提供了一种箱体打磨方法,采用上述的箱体打磨用夹持变位装置,包括:将箱体吊装于承载平台10上,定位组件20对箱体进行夹紧定位;依次打磨箱体除底面外的侧表面;夹持组件70运动至箱体位置,夹紧箱体的顶角并上升至合适位置,360度自由旋转且任意角度悬停,协同配合打磨头完成箱体内外打磨;夹持组件70将箱体旋转后置于承载平台10上,并撤回至安全距离,定位组件20对箱体进行夹紧定位后打磨未打磨的底面,完成箱体整体打磨。
34.下面以本实施例为例,对本发明的箱体打磨用夹持变位装置的使用方式以及打磨方法进行简要说明。
35.用起重机械将钣金箱体a吊装置于承载平台10的中心,定位板22移动夹紧产品进行定位,机器人打磨装置首先开始打磨箱体的上下两个端面、前面和右侧面,完成后,夹持组件70自动运动至箱体位置,夹块72夹紧箱体的8个顶角,上升至合适位置,360度自由旋转,任意角度悬停,协同配合机器人打磨装置完成箱体内外打磨,最后将箱体旋转180度(相对于初始位置)置于承载平台10的中心,夹持组件70松开箱体并自动运动至安全位置,定位板22移动夹紧产品进行定位,机器人打磨装置打磨箱体后面和左侧面留下的死角,完成箱体打磨。
36.与现有技术相比,本发明实施方式的箱体打磨用夹持变位装置,其通过移动旋转组件以及夹持组件的设置,能够实现箱体的自动翻转和自由定位,配合打磨头完成箱体内外打磨,提高生产效率,节省人力成本。
37.本发明实施方式的箱体打磨用夹持变位装置,通过可移动的夹块夹持箱体的8个顶角,可适用于所有尺寸的机箱或机柜,适用性强。
38.前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。