1.本发明涉及自动控制技术领域,尤其涉及一种扫地机器人用水箱及扫地机器人。
背景技术:
2.智能清洁机器人各种室内环境越来越普及,例如商场、办公楼、走道、酒店及家庭中。
3.目前的清洁型机器人,由于清洁区域较大导致水箱体积较大,高度较高。污水箱和清水箱分开布置,使得机器行走稳定性不好。
技术实现要素:
4.本发明实施例提供一种扫地机器人用水箱及扫地机器人,以解决现有的扫地机器人存在的机器行走稳定性不好的技术问题。
5.为了达到上述目的,本发明提供的具体方案如下:
6.第一方面,本发明实施例提供了一种扫地机器人用水箱,所述扫地机器人用水箱包括支撑板、盖板、外水箱和内水箱,所述外水箱设置于所述支撑板上,所述内水箱嵌套设置于所述外水箱内,所述盖板盖合于所述外水箱和所述内水箱上;
7.所述外水箱的中心线与所述内水箱的中心线重合。
8.可选的,所述扫地机器人用水箱还包括吸风电机、传动组件、排风通道和吸水通道;
9.所述排风通道的底部设置有滚刷,所述吸水通道的底部设置有吸水扒;
10.所述传动组件与所述吸风电机传动连接,所述传动组件用于带动所述吸风电机的吸风口与所述排风通道的顶部端口或者与所述吸水通道的顶部端口连通;
11.所述排风通道和所述吸水通道均与所述内水箱连通。
12.可选的,所述盖板内开设有中空风道,所述吸风电机的吸风口与所述中空风道连通,所述排风通道的顶部端口与所述中空风道连通,所述吸水通道的顶部端口与所述中空风道连通,所述中空风道与所述污水箱连通;
13.所述传动组件的端部设有活塞,所述传动组件推动所述活塞盖合在所述排风通道的顶部端口或者所述吸水通道的顶部端口。
14.可选的,所述传动组件包括驱动电机、拉杆和摆臂,所述驱动电机和所述拉杆均设置于所述中空风道内,所述驱动电机的转轴与所述拉杆固定连接,所述拉杆与所述摆臂的一端传动连接,所述摆臂的另一端设置有所述活塞,所述摆臂带动所述活塞移动至所述排风通道的顶部端口或者所述吸水通道的顶部端口。
15.可选的,所述活塞为与所述排风通道的顶部端口或者所述吸水通道的顶部端口过盈配合的密封垫。
16.可选的,所述排风通道和所述吸水通道均设置于所述内水箱内。
17.可选的,所述排风通道的顶部端口和所述吸水通道的顶部端口均朝向同一水平侧
面。
18.可选的,所述内水箱与所述盖板贴合的区域设置有密封圈。
19.第二方面,本发明实施例提供了一种扫地机器人,包括如第一方面中任一项所述的扫地机器人用水箱。
20.可选的,所述扫地机器人还包括驱动轮,所述驱动轮设置于所述支撑板的下方作业区域;
21.所述支撑板上开设有排风通孔和吸水通孔,所述滚刷经由所述排风通孔伸向所述作业区域,所述吸水扒经由所述吸水通孔伸向所述作业区域。
22.上述本发明实施例提供的扫地机器人用水箱及其所应用的扫地机器人,其中扫地机器人用水箱包括支撑板、盖板、外水箱和内水箱,所述外水箱设置于所述支撑板上,所述内水箱嵌套设置于所述外水箱内,所述盖板盖合于所述外水箱和所述内水箱上;所述外水箱的中心线与所述内水箱的中心线重合。内水箱和外水箱重合嵌套设置,且中心线相重合,可以保证外水箱水量和内水箱水量不均衡时也能维持平衡,保证扫地机器人的行走稳定性和正常工作,且极大程度地节省了扫地机器人用水箱的体积。
附图说明
23.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
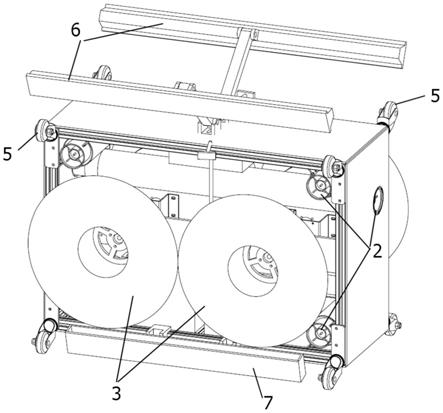
24.图1为本发明实施例提供的一种扫地机器人用水箱的结构示意图;
25.图2为本发明实施例提供的扫地机器人用水箱的部分结构示意图;
26.图3为本发明实施例提供的扫地机器人用水箱的部分结构示意图;
27.图4为本发明实施例提供的扫地机器人用水箱的部分结构示意图;
28.图5为本发明实施例提供的扫地机器人用水箱的部分结构示意图。
29.附图标记汇总:
30.扫地机器人用水箱100;
31.支撑板110,盖板120,外水箱130,内水箱140;
32.吸风电机150,传动组件160,驱动电机161、拉杆162和摆臂163;
33.排风通道170,滚刷171;吸水通道180,吸水扒181;
34.活塞190;
35.滚轮200。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.参见图1,为本发明实施例提供的一种扫地机器人用水箱100的结构示意图。如图1
所示,所述扫地机器人用水箱100包括支撑板110、盖板120、外水箱130和内水箱140,所述外水箱130设置于所述支撑板110上,所述内水箱140嵌套设置于所述外水箱130内,所述盖板120盖合于所述外水箱130和所述内水箱140上;
38.所述外水箱130的中心线与所述内水箱140的中心线重合。
39.本实施例提供的扫地机器人用水箱100,应用于扫地机器人,作为主要承载部件,承载用于扫地的清水及回收的污水。具体的,如图1所示,所述扫地机器人用水箱100竖直放置于地面的作业区域,即需要清扫的区域,由下至上依次包括支撑板110、外水箱130和内水箱140以及盖板120。支撑板110作为主要的支撑部件,一般平行于地面设置即可,且距离地面一定距离,便于移动。
40.外水箱130和内水箱140为扫地机器人用水箱100的主要功能部件,外水箱130和内水箱140嵌套设置,内水箱140设置于外水箱130内,且一般位于外水箱130内的上半部区域。外水箱130可以用来盛放用来扫地或者洗地的清水,内水箱140用来盛放清水洗地后回收的污水,可能还包括回收的部分固体灰尘垃圾等。
41.在清扫初期,外水箱130内存放清水且此时内水箱140内是没有污水的,在清水逐渐用于扫地或者洗地后才能回收获得污水,此时既有清水又有污水,清水位于外水箱130内切污水位于内水箱140内。随着清扫工作的进行,清水逐步从外水箱130流入地面的工作区域后再被回收至内水箱140内,即外水箱 130内的清水逐渐减少且内水箱140内的污水逐渐增多。内水箱140置于外水箱130内,随着污水逐渐增多内水箱140在外水箱130内的高度可以逐渐降低,整体的体积基本保持不变。
42.此外,考虑到清水和污水的总量一般不平衡,为避免外水箱130和内水箱 140倾斜,将外水箱130的中心线与内水箱140的中心线重合设置。这样,无论外水箱130内的清水与内水箱140内的污水的总量差距多大,外水箱130和内水箱140均位置相对平衡。相对于现有的清水箱和污水箱并列设置的方案,极大程度地避免了水量差距导致倾斜的情况,保证了扫地机器人的正常工作。
43.除了上述的主体部件之外,所述扫地机器人用水箱100还包括盖板120。在上述结构中,内水箱140和外水箱130嵌套设置,且设置于支撑板110上。盖板120盖合在嵌套设置的内水箱140和外水箱130上,外水箱130和内水箱 140的顶部可以均与盖板120的下表面抵接,以使得外水箱130和内水箱140 内均形成封闭空间,且外水箱130和内水箱140相隔绝。可选的,所述内水箱 140与所述盖板120贴合的区域设置有密封圈,这样可以达到较好的隔绝密封效果。
44.在上述实施例的基础上,所述扫地机器人用水箱100还可以包括吸风电机 150、传动组件160、排风通道170和吸水通道180;
45.所述排风通道170的底部设置有滚刷171,所述吸水通道180的底部设置有吸水扒181;
46.所述传动组件160与所述吸风电机150传动连接,所述传动组件160用于带动所述吸风电机150的吸风口与所述排风通道170的顶部端口或者与所述吸水通道180的顶部端口连通;
47.所述排风通道170和所述吸水通道180均与所述内水箱140连通。
48.本实施方式中,在扫地机器人用水箱100内增设用于回收污水和灰尘的相关结构,
主要分为排风吸尘和污水吸收两个通道,均是通过吸风电机150的吸力实现向上回收。排风吸尘的方案为,排风通道170上接内水箱140下接滚刷171,在吸风电机150的作用下,滚刷171在作业区域滚动将灰尘扫入排风通道170并向上回收至内水箱140内。污水吸收的方案为,吸水通道180上接内水箱140下接滚刷171,在吸风电机150的作用下,吸水扒181在作业区域扒回污水进入吸水通道180,并向上回收至内水箱140内。
49.考虑到吸尘和吸污通常是不同时进行的,而二者均需要依赖吸风电机150,为减小整体体积及成本,可以仅设置一个吸风电机150,吸风电机150的吸风口在传动组件160的带动下,与排风通道170的顶部端口连通,或者与吸水通道180的顶部端口连通,选择性地提供吸力。
50.具体实施时,如图2所示,所述盖板120内可以开设有中空风道,所述吸风电机150的吸风口与所述中空风道连通,所述排风通道170的顶部端口与所述中空风道连通,所述吸水通道180的顶部端口与所述中空风道连通,所述中空风道与所述污水箱连通;
51.所述传动组件160的端部设有活塞190,所述传动组件160推动所述活塞 190盖合在所述排风通道170的顶部端口或者所述吸水通道180的顶部端口。
52.将盖板120做成中空结构,便于传输吸风电机150的风力。排风通道170 的顶部端口和吸水通道180的顶部端口均伸入所述中空风道内,且中空风道与吸风电机150的吸风口连通,这样,吸风电机150就可以直接为排风通道170 和吸水通道180提供吸力。
53.传动组件160的端部设活塞190,在需要排风通道170吸尘时,传动组件带动活塞190盖合到吸水通道180的顶部端口,将吸水通道180暂时关闭。而在需要吸水通道180回收污水时,活塞190盖合到排风通道170的顶部端口,将排风通道170暂时关闭,保证吸水和吸尘错位进行且互不干扰。
54.具体的,如图2、图3和图4所示,所述传动组件160可以具体包括驱动电机161、拉杆162和摆臂163,所述驱动电机161和所述拉杆162均设置于所述中空风道内,所述驱动电机161的转轴与所述拉杆162固定连接,所述拉杆162与所述摆臂163的一端传动连接,所述摆臂163的另一端设置有所述活塞190,所述摆臂163带动所述活塞190移动至所述排风通道170的顶部端口或者所述吸水通道180的顶部端口。
55.如图3所示,驱动电机161驱动拉杆162,拉动摆臂163绕销轴或者传动轴摆动,使得摆臂163端部的活塞190在排风通道170和吸水通道180的顶部端口之间摆动,活塞190控制排风通道170和吸水通道180与中空风道之间的选择性连通。
56.可选的,所述活塞190为与所述排风通道170的顶部端口或者所述吸水通道180的顶部端口过盈配合的密封垫。所述排风通道170的顶部端口和所述吸水通道180的顶部端口均朝向同一水平侧面。
57.如图4至图5所示,这样,排风通道170和吸水通道180的顶部端口均朝向水平侧面,密封垫可以直接移动贴合到顶部端口并密封盖紧,实现隔绝。当然,在其他实施方式中,活塞190也可以为塞入所述吸水通道或者排风通道的顶部端口的堵塞机构,不作限定。
58.可选的,所述排风通道170和所述吸水通道180均设置于所述内水箱140 内。
59.本实施方式中,排风通道170和吸水通道180均设置于内水箱140内,可以很大程度地减少整体体积,实现空间的有效利用。
60.上述本发明实施例提供的扫地机器人用水箱,内水箱和外水箱重合嵌套设置,且
中心线相重合,可以保证外水箱水量和内水箱水量不均衡时也能维持平衡,保证扫地机器人的行走稳定性和正常工作,且极大程度地节省了扫地机器人用水箱的体积。水箱整体采用了可抽取的结构,做到并且将污水箱与清水箱合并起来,不但可以方便清洗,还节省了空间,也解决了水箱重心不稳的情况。将吸风电机的分道和分道切换装置都布置在水箱盖中,大大的节省了水箱空间。
61.在上述实施例的基础上,本发明实施例提供了一种扫地机器人,包括扫地机器人用水箱。此处所述的扫地机器人用水箱可以为上述图1至图5所示的实施例提供的水箱。
62.可选的,如图1和图2所示,所述扫地机器人100还包括驱动轮300,所述驱动轮200设置于所述支撑板110的下方作业区域;
63.所述支撑板110上开设有排风通孔和吸水通孔,排风通孔上接排风通道 170,排风通孔下接滚刷171,滚刷171经由所述排风通孔伸向所述作业区域。吸水通孔上接吸水通道180,吸水通孔下接吸水扒181,所述吸水扒181经由所述吸水通孔伸向所述作业区域。
64.一般的,驱动轮为万向轮,便于调整行走方向。此外,扫地机器人还可以包括其他结构,例如充电组件、图像采集组件等,不再赘述。
65.上述本发明实施例提供的扫地机器人,其中扫地机器人用水箱包括支撑板、盖板、外水箱和内水箱,所述外水箱设置于所述支撑板上,所述内水箱设置于所述外水箱内,所述盖板盖合于所述外水箱和所述内水箱上;所述外水箱的中心线与所述内水箱的中心线重合。内水箱和外水箱重合嵌套设置,且中心线相重合,可以保证外水箱水量和内水箱水量不均衡时也能维持平衡,保证扫地机器人的行走稳定性和正常工作,且极大程度地节省了扫地机器人用水箱的体积。
66.上述本发明实施例提供的扫地机器人的具体实施过程,可以参见上述图1 所示的实施例提供的扫地机器人用水箱的具体实施过程,在此不再一一赘述。
67.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。