1.本发明涉及自动控制的技术领域,尤其涉及一种高楼幕墙清洗机器人。
背景技术:
2.目前,大部分城市高楼都采用较为美观的玻璃幕墙结构,然而玻璃幕墙的定期清洗工作却成为目前的一大难题。目前,我国高楼玻璃幕墙的清洗方式主要是吊篮清洗和升降机清洗,吊篮清洗主要是由工人借助楼顶下放的绳索在玻璃幕墙外侧使用手中的抹布、铲刀等清洁工具进行清洗作业;升降机清洗是由清洗工人借助地面升降平台进行高空擦洗,两种传统的清洁方式不仅效率低、成本高,而且容易出现安全事故,远远不能满足社会的需求。玻璃幕墙清洗工作是一项危险系数高的空中作业,工作人员的招聘也面临这巨大难题。
3.在高空机器人清洗过程中,机器人的吸附方式是能否高效完成清洗作业的关键技术难题。现有的高空幕墙清洗机器人大多是通过真空吸盘吸附技术,真空吸盘吸附技术依靠负压牢牢吸附在壁面,但遇见存在胶条、接缝等障碍物时会导致吸附能力丧失,容易造成意外失误的发生。为解决幕墙清洗难题,近年来国内外科研人员开展了相应研究,研制了不少高楼幕墙清洗机器人,但大多以吊挂结合负压吸附或单向风力的方式实现机器人的清洗运动,这类方式的清洗机器人不易实现越障,难以适应具有倾斜和造型复杂的幕墙,而且在清洗过程中容易给清洗面造成二次污染。因此研发一类能满足不同幕墙清洗需求、控制方便、成本低廉且清洗效率高的高楼玻璃幕墙清洗机器人具有广泛的应用价值和很高的经济价值。
技术实现要素:
4.本发明提供了一种高楼幕墙清洗机器人,以空间十字设置的多套风力机构作为吸附、翻滚和飞跃障碍的动力机构,实现对平面幕墙或者弯曲度小的幕墙、折角状幕墙的清洗操作,整个控制过程非常便捷,工作效率高,具有较强的推广应用价值。
5.本发明可通过以下技术方案实现:
6.一种高楼幕墙清洗机器人,包括控制系统,以及与所述控制系统相连的缆绳收放单元、机器人本体、采集单元,
7.所述缆绳收放单元用于悬吊机器人本体,
8.所述采集单元设置在机器人本体上,用于采集机器人本体的姿态信息和机器人本体周围的环境信息,
9.所述机器人本体包括框架,在所述框架的周边设置有多套风力机构,其平行于幕墙的两个相对的侧面上各设置一个或者多个清洗机构,多套所述风力机构呈空间十字设置,分别用于提供垂直于幕墙方向的压力和提升力、以及平行于幕墙方向的作用力,所述清洗机构用于对幕墙进行清洗,
10.所述控制单元根据采集单元采集的姿态信息和环境信息,结合缆绳收放单元,通
过多套风力机构之间的配合工作,控制机器人本体在平行于幕墙的两个相对的侧面之间进行翻滚操作和前后左右方向的飞跃障碍操作,从而实现机器人本体对折角状幕墙的清洗工作。
11.进一步,多套所述风力机构被划分为四组,其中两组对称设置在平行于幕墙的两个相对的侧面上,且分设在侧面相对的两侧,分别为a侧和b侧,剩余两组对称设置在垂直于幕墙的两个相对的侧面上,所述缆绳收放单元包括沿待清洗幕墙顶端的结构走向设置的轨道以及能够沿所述轨道移动的缆绳收放机,
12.处于朝向幕墙侧面的a侧的多套风力机构提供垂直于幕墙方向的压力,b侧的多套风力机构提供垂直于幕墙方向的提升力,控制机器人本体从朝向幕墙侧面向背向幕墙侧面进行翻滚操作,或者处于背向幕墙侧面的a侧的多套风力机构提供垂直于幕墙方向的压力,b侧的多套风力机构提供垂直于幕墙方向的提升力,控制机器人本体从背向幕墙侧面向朝向幕墙侧面进行翻滚操作,再结合缆绳收放单元,实现从折角状幕墙的一边幕墙到另一边幕墙的清洗。
13.进一步,处于朝向幕墙侧面的多套风力机构提供垂直于幕墙方向的提升力,同时处于垂直于幕墙的两个相对的侧面上的多套风力机构提供平行于幕墙方向的作用力,或者通过缆绳收放单元提供沿缆绳方向的作用力,从而控制机器人本体完成左右前后方向的飞跃障碍操作。
14.进一步,对称的两个风力机构均分别设置在管状结构的两端,它们空间交叉设置,将清洗机构包裹在内。
15.进一步,所述风力机构设置为涵道风机,其裸露在对应侧面的表面设置。
16.进一步,在所述框架的内部设置有过滤机构和储水器,其平行于幕墙的两个侧面的边缘各设置一个污水回收机构,所述污水回收机构通过过滤机构与储水器连通,用于对清洗机构清洗后的污水进行回收,所述过滤机构用于对污水进行过滤。
17.进一步,所述污水回收机构包括沿侧面上边缘设置的刮板,以及沿侧面下边缘设置的收集舱,所述收集舱用于收集污水,所述刮板与第一调整机构相连,所述第一调整机构用于调整刮板的角度,使其上的刮面与幕墙表面契合,所述收集舱的一侧与第二调整机构相连,所述第二调整机构用于调整收集舱的角度,使其另一侧与幕墙表面契合。
18.进一步,在所述收集舱另一侧的上边缘设置有一个坡角板。
19.本发明有益的技术效果在于:
20.(1)整体结构简单,采用涵道风机驱动的推力吸附技术,便于提供清洗压力,不易造成清洗面二次污染,易于提供越障的提升力,实现无接触越过障碍物,同时还可平衡横向风阻,使得机器人本体的姿态可控,稳定性更好,并且能够完成对折角状、平面或者弯曲度小等多种形状结构复杂幕墙的清洗工作,清洗形式多样,如钟摆式、直线式移动清洗等,应用范围广,适用性更强;
21.(2)增设污水回收单元,使得污水循环利用,无需频繁停机更换清洗用水,提高清洗效率和清洗速度;
22.(3)无需成本高昂的移动设备和额外的越障机构,对设备要求较低,大大降低了高楼玻璃幕墙清洗机器人的设备成本,同时其清洗效率高,极具应用前景。
附图说明
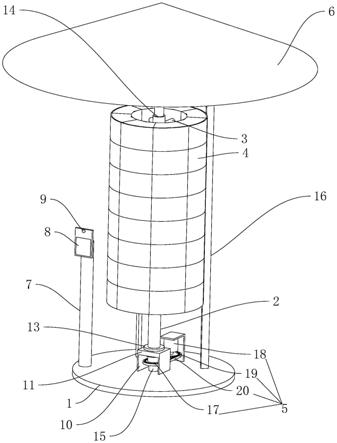
23.图1为本发明的总体结构示意图一;
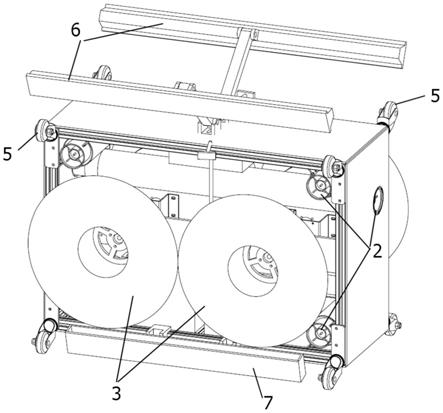
24.图2为本发明的总体结构示意图二;
25.图3为本发明的内部结构示意图;
26.图4为本发明的两个风力机构配合后的结构示意图;
27.图5为本发明的收集舱和第二调整机构的配合结构示意图;
28.其中,1-框架,2-风力机构,3-清洗机构,4-涵道风机,5-移动轮,6-刮刀,7-收集舱,8-第一调整机构,9-第二调整机构,10-坡角板。
具体实施方式
29.下面结合附图及较佳实施例详细说明本发明的具体实施方式。
30.如图1-5所示,本发明提供了一种高楼幕墙清洗机器人,包括控制系统,以及与控制系统相连的缆绳收放单元、机器人本体、采集单元,缆绳收放单元用于悬吊机器人本体,采集单元设置在机器人本体上,用于采集机器人本体的姿态信息和机器人本体周围的环境信息,该机器人本体包括框架1,在框架1的周边设置有多套风力机构2,其平行于幕墙的两个相对的侧面上各设置一个或者多个清洗机构3,多套风力机构2呈空间十字设置,分别用于提供垂直于幕墙方向的压力和提升力、以及平行于幕墙方向的作用力,该清洗机构3用于对幕墙进行清洗,
31.该控制单元根据采集单元采集的姿态信息和环境信息,结合缆绳收放单元,通过多套风力机构2之间的配合工作,控制机器人本体在平行于幕墙的两个相对的侧面之间进行翻滚操作和前后左右方向的飞跃障碍操作,从而实现机器人本体对折角状幕墙的清洗工作。
32.这样,通过在机器人本体的两个相对的侧面均设置清洗机构3,以及设置在其周边的多套风力机构2,实现机器人本体的翻滚操作,从而使机器人本体两侧的清洗机构3均可以实施对幕墙的清洗,进而实现对折角状幕墙的清洗工作,同时,不翻滚时,各自侧面的清洗机构3均可以对平面或者弯曲度小的幕墙执行清洗工作,适用范围更广,并且借助多套风力机构2和缆绳收放单元,可以实现机器人前后左右方向的飞跃障碍操作,同时各套风力机构2分布在机器人本体的周边,且均可以单独控制,使其可以更加契合幕墙的表面状况,吸附能力更强,使得清洗作业更加安全可靠,具有较高的清洗效率,极具应用前景。另外,本发明的高楼玻璃幕墙清洗机器人结构简单,操作方便,能够在玻璃幕墙上进行翻滚、清洗作业和跨越障碍物,能够有效应对外界环境对机器人本体姿态产生的影响,稳定性更好。
33.具体地,将所有的风力机构2划分为四组,其中两组对称设置在平行于幕墙的两个相对的侧面上,且分设在侧面相对的两侧,当然也可以均匀间隔设置在侧面的边缘,剩余两组对称设置在垂直于幕墙的两个相对的侧面上,更进一步,对称的两个风力机构2均分别设置在管状结构的两端,它们空间交叉设置,将清洗机构3包裹在内,该风力机构2可以设置为涵道风机4,其裸露在对应侧面的表面设置,其产生的风力作用更加集中,控制更加方便。
34.该缆绳收放单元包括沿待清洗幕墙顶端的结构走向设置的轨道以及能够沿轨道移动的缆绳收放机如卷扬机,便于后续过程全自动化的实现。
35.该清洗机构3可以根据框架1的大小设置有多个,而多套风力机构2的空间交叉设
置将所有清洗机构3包裹在内,每个清洗机构3均采用旋转结构,包括驱动电机,该驱动电机的转轴与清洗转盘的一侧中心垂直连接,在清洗转盘的另一侧均匀布满清洁刷,每个清洁刷均通过管道与储水器连通,如在清洗转盘上均匀设置有多个与清洁刷对应的通孔,其与管道固定连接,这样,在驱动电机的带动下,清洗转盘做旋转运动,从而使其上的所有清洁刷转动,完成对幕墙的清洗操作。
36.为了配合机器人本体在执行清洗操作同时的移动,我们在框架1中平行于幕墙的两个相对的侧面边缘间隔设置多个移动轮5,如框架为方体结构,可以在其八个顶角各设置一个,由于执行清洗操作时,清洗机构3与幕墙之间是有接触压力的,因此,移动轮5的边缘和清洗机构的边缘不在同一平面上,相比较移动轮,清洗机构3要更加靠近幕墙,从而确保不执行清洗操作的时候,移动轮5与幕墙不接触,而执行清洗操作时,移动轮5与幕墙接触,便于在缆绳收放机的带动下整个机器人本体的移动。
37.这样,处于朝向幕墙侧面的a侧的多套风力机构2提供垂直于幕墙方向的压力,相当于机器人本体的a侧吸附在幕墙上,而b侧的多套风力机构2提供垂直于幕墙方向的提升力,相当于对机器人本体的b侧实施抬升,由于该提升力始终与机器人本体的另一侧垂直即为切向力,当然压力和提升力要有大小差,从而能够控制机器人本体从朝向幕墙侧面向背向幕墙侧面进行翻滚操作,当然此时处于背向幕墙侧面的多套风力机构也可以采用相同的控制方式,从而提高翻滚操作的效率;
38.同样或者处于背向幕墙侧面的a侧的多套风力机构2提供垂直于幕墙方向的压力,b侧的多套风力机构2提供垂直于幕墙方向的提升力,控制机器人本体从背向幕墙侧面向朝向幕墙侧面进行翻滚操作,当然此时处于朝向幕墙侧面的多套风力机构2也可以采用相同的控制方式,从而提高翻滚操作的效率;
39.然后再结合缆绳收放单元即翻滚操作完成后,缆绳收放机沿轨道移动至相应位置,实现从折角状幕墙的一边幕墙到另一边幕墙的清洗。
40.在清洗的过程中难免会遇到障碍物如两块玻璃之间的包边等障碍物,如果朝向幕墙侧面的多套风力机构2提供垂直于幕墙方向的提升力,同时垂直于幕墙的两个相对的侧面上的多套风力机构2提供平行于幕墙方向的作用力,或者通过缆绳收放单元提供沿缆绳方向的作用力,从而控制机器人本体完成左右前后方向的飞跃障碍操作。如果将缆绳收放单元通过缆绳提供的牵引力作为z轴方向,垂直于幕墙方向的压力或者提升力作为x轴方向,平行于幕墙方向的作用力作为y轴方向,由于此时的机器人本体始终由缆绳收放单元牵引着,当提升力促使机器人本体脱离幕墙时,平行于幕墙方向的作用力就可以推动机器人本体沿y轴方向移动,实现左右方向的飞跃障碍操作;或者通过缆绳收放单元提供沿缆绳方向的作用力,此时的作用力就可以推动机器人本体沿z轴方向移动,实现前后方向的飞跃障碍操作,如果在此过程中,采集单元检测到大风存在,可能会影响机器人本体的稳定性,平行于幕墙方向的作用力就可以起到抗风阻的效果,整个过程的控制非常方便,便于实施。
41.为了提高水的利用率,我们在框架1的内部设置有过滤机构和储水器,其平行于幕墙方向的两个相对的侧面边缘各设置一套污水回收机构,中央设置清洗机构3,该污水回收机构通过过滤机构与储水器连通,用于对清洗机构3清洗后的污水进行回收,该过滤机构用于对污水进行过滤,该污水回收机构包括沿侧面上边缘设置的刮板6,以及沿侧面下边缘设置的收集舱7,该收集舱7呈开口状,用于收集污水。
42.该刮板6与第一调整机构8相连,该第一调整机构8用于调整刮板6的角度,使其上的刮面与幕墙表面契合,可以采用第一电动机和与之连接的连杆机构组成,如该连杆机构包括连接杆,其一端固定套装在第一转轴上,该第一转轴与第一电动机的转轴联动,该连接杆的另一端通过第二转轴与刮板转动连接,该收集舱7的一侧与第二调整机构9相连,该第二调整机构9用于调整收集舱的角度,使其另一侧与幕墙表面契合,可以在收集舱7的开口端的另一侧的上边缘设置一个坡角板10,该坡角板10也沿侧面的下边缘设置,该第二调整机构9包括第二电动机,该第二电动机的转轴与连杆联动,同样该连杆也沿侧面的下边缘设置,在其上固定套装有两个u形扣,其u形扣的两个侧板通过第三转轴与收集舱的一侧转动连接,这样通过第二电动机的转动就可以调整收集舱的角度,从而使其上的坡角板与幕墙成0度至30度之间的角度,便于收集污水进入收集舱。
43.本发明还提供了一种高楼幕墙清洗机器人的控制方法,主要针对平面幕墙或者弯曲度小的幕墙,以及折角状幕墙,具体如下:
44.对于平面幕墙或者弯曲度小的幕墙,主要包括以下步骤:
45.步骤一、将轨道设置在幕墙顶端的走向设置,再将缆绳收放机设置在轨道上,通过缆绳与机器人本体连接;
46.步骤二、利用缆绳将机器人本体由幕墙顶端逐渐向幕墙底端匀速下放,同时控制朝向幕墙侧面的多套风力机构提供垂直于幕墙方向的压力,使朝向幕墙侧面的清洗机构压向幕墙,实施清洗操作,随着机器人本体的逐渐下移,通过第一调整机构、第二调整机构调整刮板和收集舱与幕墙的角度,对清洗机构留下的污水进行再收集,实现二次清理;
47.步骤三、根据采集模块采集到的姿态信息,控制垂直于幕墙的两个侧面的多套风力机构提供平行于幕墙方向的作用力,实现抗风阻;
48.步骤四、控制缆绳收放机沿轨道移动预定距离,该预定距离可以根据机器人本体的一次性能够清洗范围的横向距离而定,重复步骤二至三,完成对幕墙对应预定距离范围内的清洗,直至完成整个幕墙的清洗。
49.当然还可以采取其他控制方法,如对机器人本体的下放控制采用步进方式而非匀速,即每次下放固定距离如机器人本体能够清洗范围的纵向距离,在该纵向距离范围内,在通过朝向幕墙侧面的多套风力机构提供垂直幕墙的压力,使朝向幕墙侧面的清洗机构压向幕墙,实施清洗操作的同时,通过垂直于幕墙的两个侧面的多套风力机构提供作用力,带动机器人本体沿y轴方向移动,由于机器人本体与缆绳收放机之间通过缆绳连接,因此可以采用类似钟摆式的控制运动,从而进一步扩大了机器人本体的清洗范围,具体沿y轴方向的移动距离可以根据实际情况而定,重复上述过程,完成下一纵向距离范围内的清洗,直至完成整个幕墙的清洗。
50.对于折角状幕墙,主要包括以下步骤:
51.步骤一、将轨道设置在幕墙顶端的走向设置,再将缆绳收放机设置在轨道上,通过缆绳与机器人本体连接;
52.步骤二、对于折角状幕墙中一边的幕墙可以采用对平面幕墙或者弯曲度小的幕墙的控制方法执行清洗操作;
53.步骤三、从折角状幕墙的一边幕墙到另一边幕墙转移时,先控制朝向一边幕墙侧面的一侧即a侧的多套风力机构提供垂直于该一边幕墙方向的压力,同时另一侧即b侧的多
套风力机构提供垂直于该一边幕墙方向的提升力,其中压力要小于提升力,使机器人本体慢慢地从折角状幕墙的一边幕墙向另一边幕墙翻滚,当机器人本体越过折角状幕墙的一半角度时,朝向另一边幕墙侧面的多套风力机构提供垂直于另一边幕墙的压力,使机器人本体可以快速翻滚到另一边幕墙,同时使机器人本体压向即吸附在另一边幕墙上;
54.当然在翻滚期间,a侧可以选择靠近另一边幕墙的一侧,同时可以先控制平行于一边幕墙的两个侧面的a侧的多套风力机构提供垂直于该一边幕墙方向的压力,同时b侧的多套风力机构提供垂直于该一边幕墙方向的提升力,可以翻滚效率更高,只是在越过折角状幕墙的一半角度时,朝向另一侧幕墙侧面的a侧的多套风力机构要翻转,提供垂直于另一边幕墙方向的压力,便于整个机器人本体的吸附。
55.步骤四、控制缆绳收放机沿轨道移动预定距离,该预定距离可以根据机器人本体的一次性能够清洗范围的横向距离而定,使缆绳收放机移动到另一边幕墙,随后即可采用对平面幕墙或者弯曲度小的幕墙的控制方法执行清洗操作。
56.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,因此,本发明的保护范围由所附权利要求书限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。