1.本发明涉及液压执行器领域,特别是涉及一种多动作液压执行器。
背景技术:
2.无人运输一般采用agv小车, agv小车广泛应用于工厂车间、物流公司、港口码头等场合,节省人力资源,具有动作范围大,效率高、智能化程度高等特点。agv小车存在着控制系统复杂、故障率高、负载小体积大等缺点。
3.目前需求在核辐射环境中搬运物件,由于搬运动作空间范围小,负载大,一般通过轨道移动,实现步进控制,agv小车不能满足需求。
技术实现要素:
4.本发明主要解决的技术问题是提供一种多动作液压执行器,能够通过步进控制实现前后移动,移动精度高,定位准确。
5.为解决上述技术问题,本发明采用的一个技术方案是:提供一种多动作液压执行器,包括轨道,所述轨道上滑动设置有滑块一和滑块二,所述滑块一和滑块二在轴向上通过移动油缸相连接,所述滑轨上端沿轴向开设有多个定位孔,所述滑块二和滑块一上安装有插销油缸,所述插销油缸前端伸入定位孔使滑块一或滑块二处于锁定状态,所述插销油缸前端脱离定位孔使滑块一或滑块二处于解锁状态,当所述滑块一和滑块二中一个为解锁状态,一个为锁定状态时,移动油缸拉动处于解锁状态的滑块向处于锁定状态的滑块移动。
6.在本发明一个较佳实施例中,所述移动油缸的缸筒连接在滑块二内部,所述移动油缸的活塞杆连接在滑块一内部,所述移动油缸上安装有位移传感器。
7.在本发明一个较佳实施例中,所述缸筒的外侧安装有连接套,所述滑块二具有开口,所述缸筒的连接套沿开口装入滑块二内部,并通过压盖紧固。
8.在本发明一个较佳实施例中,所述活塞杆的杆头内部安装有关节轴承,所述关节轴承内连接有销轴,所述销轴两端配合插紧在滑块一内。
9.在本发明一个较佳实施例中,所述插销油缸对称设置在滑块一和滑块二的左右两端,所述插销油缸的前端具有与定位孔配合的定位销。
10.在本发明一个较佳实施例中,所述轨道的上端具有沿轴向设置的滑台,所述滑块一和滑块二上具有滑槽,所述滑块一和滑块二通过滑槽活动设置在滑台上,所述插销油缸位于滑槽的左右两侧。
11.在本发明一个较佳实施例中,所述滑台的左右两侧具有呈八字形分布的滑动斜面,所述滑块二内安装有与滑动斜面相接触的滚轮。
12.在本发明一个较佳实施例中,所述滑块一的滑槽内还设有滑动垫片。
13.在本发明一个较佳实施例中,所述定位孔间隔均匀分布在滑台上。
14.在本发明一个较佳实施例中,所述滑块二内还安装有多个沿垂直方向伸出或缩回的举升油缸,所述滑块一和滑块二均处于锁定状态时,举升油缸伸出或者缩回。
15.本发明的有益效果是:本发明多动作液压执行器,能够通过步进控制实现前后移动,移动精度高,定位准确,通过举升油缸同步抬升托举重物,举升力大。
附图说明
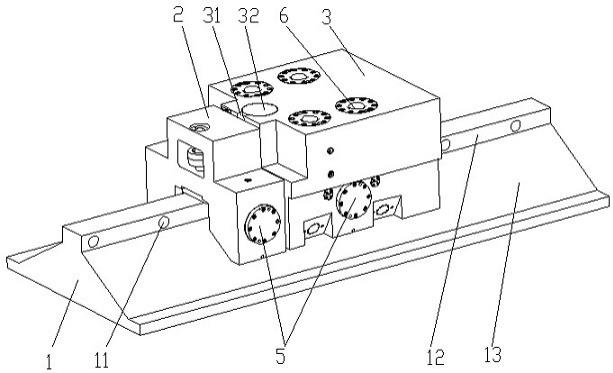
16.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:图1是本发明多动作液压执行器一较佳实施例的立体结构示意图;图2是图1的剖视图;图3是图1的局部结构示意图;图4是图3的a-a向剖视图;图5是图3的n-n向剖视图;附图中各部件的标记如下:1、轨道,11、定位孔,12、滑台,13、滑动斜面,2、滑块一,21、滑槽,22、滑动垫片,3、滑块二,31、开口,32、压盖,33、滚轮,4、移动油缸,41、缸筒,42、活塞杆,43、连接套,44、杆头,45、关节轴承,46、销轴,5、插销油缸,51、定位销,6、举升油缸。
具体实施方式
17.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
18.请参阅图1至图5,一种多动作液压执行器,包括轨道1,轨道1上滑动设置有滑块一2和滑块二3,滑块一2和滑块二3在轴向上通过移动油缸4相连接,滑轨1上端沿轴向开设有多个定位孔11,滑块二3和滑块一2上安装有插销油缸5,插销油缸5前端伸入定位孔11使滑块一2或滑块二3处于锁定状态,插销油缸5前端脱离定位孔11使滑块一2或滑块二3处于解锁状态,当滑块一2和滑块二3中一个为解锁状态,一个为锁定状态时,移动油缸5拉动处于解锁状态的滑块向处于锁定状态的滑块移动。
19.另外,移动油缸4的缸筒41连接在滑块二3内部,移动油缸4的活塞杆42连接在滑块一2内部,移动油缸4上安装有位移传感器。具有位移传感器的移动油缸在现有的油缸中进行合理选择。
20.另外,缸筒4的外侧安装有连接套43,滑块二3具有开口31,缸筒4的连接套43沿开口31装入滑块二3内部,并通过压盖32紧固。
21.另外,活塞杆42的杆头44内部安装有关节轴承45,关节轴承45内连接有销轴46,销轴46两端配合插紧在滑块一2内。
22.另外,插销油缸5对称设置在滑块一2和滑块二3的左右两端,插销油缸5的前端具有与定位孔11配合的定位销51。销轴油缸5根据公知常识选用合适的油缸。
23.另外,轨道1的上端具有沿轴向设置的滑台12,滑块一2和滑块二3上具有滑槽21,滑块一2和滑块二3通过滑槽21活动设置在滑台上,插销油缸5位于滑槽21的左右两侧。
24.另外,滑台12的左右两侧具有呈八字形分布的滑动斜面13,滑块二3内安装有与滑动斜面13相接触的滚轮32。滑块二3为举升块,由于举升块需要负载重物,通过两对滚轮32确保举升块可以在轨道上滚动。
25.另外,滑块一2的滑槽内还设有滑动垫片22。滑块一2为锁紧块,由于锁紧块重量较轻,底部安装滑动垫片通过滑动垫片22在滑台12上滑动。
26.另外,定位孔11间隔均匀分布在滑台12上。
27.另外,滑块二3内还安装有4个沿垂直方向伸出或缩回的举升油缸6,滑块一2和滑块二3均处于锁定状态时,举升油缸6伸出或者缩回。举升油缸根据公知常识选用合适的油缸。举升油缸都装有传感器,举升时可以确定每个油缸的位置,通过控制系统保证同步性。
28.本发明多动作液压执行器具体工作原理如下:初始状态下,锁紧块和举升块上的插销油缸5均处于伸出状态,插销油缸5的定位销51插入定位孔11内,此时举升块和锁紧块均处于锁定状态,举升块上举升油缸6缩回到位,将负载物放置在举升块上。开始动作时,首先锁紧块上的插销油缸5缩回,定位销51脱离定位孔11,锁紧块进入解锁状态,移动油缸4伸出,活塞杆42推动锁紧块沿着轨道1向前移动一个工位,移动油缸4上的位移传感器检测油缸伸出距离,伸出到位后,锁定块上的插销油缸5再次伸出,定位销51插入定位孔11,锁紧块处于锁定状态,此时,举升块上的插销油缸5缩回,举升块处于解锁状态,活塞杆42缩回,由于活塞杆42连接的锁定块是处于锁定状态,因此,缸筒41反而向前移动,拉动举升块向前移动一个工位,举升块到位后,插销油缸5再次伸出,使举升块进入锁定状态,此时举升块和锁紧块向前移动一个工位且均处于锁定状态,举升块上的举升油缸6伸出,推动负载物向上运动,以上为一个动作循环。执行器运动到轨道末端时,反向运动,原理同上。
29.区别于现有技术,本发明多动作液压执行器,能够通过步进控制实现前后移动,移动精度高,定位准确,通过举升油缸同步抬升托举重物,举升力大。
30.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
