1.本发明涉及农业施肥技术领域,具体为一种智能型农业施肥系统及其施肥方法。
背景技术:
2.当土壤里不能提供作物生长发育所需的营养时,对作物进行人为的营养元素的补充的行为称为施肥。增加土壤养分无论施用有机肥料或无机肥料都能增加土壤养分。无机肥料大多易于溶解,施用后除部分为土壤吸收保蓄外,作物可以立即吸收。而有机肥料,除少量养分可供作物直接吸收外,大多数须经微生物分解,作物方能利用,尤其玉米高度较高的农作物施加攻粒肥;是指雌穗花丝开始抽出,授粉前后的一次追肥。主要是为了防止后期脱肥,延长上部叶片的功能期,促进灌浆,增加粒重,提高产量。
3.现有设备通常采用大面积抛洒方式进行施肥,不能进行定株施肥,从而造成肥料浪费的同时,还导致了田间杂草横行的现象出现;其次对于高株农作物施肥通常无法采用大型机械设备进行直接施肥,由于高植株生产过程中需要大量肥料,需要多次布施,通常采用人工施肥,效率低的同时,由于种植面积大,通常通风效果差,操作人员长期处于不通风环境受到阳关暴晒,从而使得操作人员可能出现中暑的现象出现。
4.基于此,本发明设计了一种智能型农业施肥系统及其施肥方法,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种智能型农业施肥系统及其施肥方法,以解决上述背景技术中提出了现有设备通常采用大面积抛洒方式进行施肥,不能进行定株施肥,从而造成肥料浪费的同时,还导致了田间杂草横行的现象出现;其次对于高株农作物施肥通常无法采用大型机械设备进行直接施肥,由于高植株生产过程中需要大量肥料,需要多次布施,通常采用人工施肥,效率低的同时,由于种植面积大,通常通风效果差,操作人员长期处于不通风环境受到阳关暴晒,从而使得操作人员可能出现中暑的现象出现的问题。
6.为实现上述目的,本发明提供如下技术方案:一种智能型农业施肥系统包括电机和挂载架,所述挂载架前端固定转动设置有挂载杆,所述挂载杆同轴固定设置有换向齿轮,所述换向齿轮啮合在电机输出轴上的输出齿轮外侧,所述挂载架远离挂载杆的一端转动设置有自转套筒,所述自传套筒同轴固定连接有自转齿轮,所述自传齿轮外侧通过变速齿轮传动连接再电机输出轴上的输出齿轮外侧,所述自传套筒上端固定设置有放料桶,所述自传套筒下端外壁通过支架固定设置有u环板,所述u环板下端两侧壁开设有长通的步进长圆孔,步进长圆孔边缘的所述u环板外侧壁固定设置有两根关于u环板中心轴线对称的步进齿条,所述u环板中间侧壁水平固定设置有隔料板,所述步进长圆孔内套设有触发杆,所述触发杆一端远超出u环板侧壁,所述触发杆同轴固定设置有两个与步进齿条相啮合的步进齿轮,位于u环板中间的所述触发杆外壁通过转轴套转动设置有圆环板,所述圆环板上端固定设置有两个对称的限位滑块,所述限位滑块滑动设置在隔料板下端开设的滑槽内壁,所述圆环板侧壁对称开设有开合长圆孔,所述开合长圆孔侧壁滑动设置有两个滑动杆,两个所
述滑动杆位于圆环板内部的一端均固定设置有半块尖头向下的锥形板,位于圆环板外端的所述滑动杆中间转动竖向转动设置有补偿螺母,所述补偿螺母中间螺接有丝杠,所述丝杠通过支架转动设置在圆环板外侧壁,靠近开合长圆孔边缘下侧的所述圆环板外壁固定设置有用于阻挡滑动杆的张开顶杆,所述丝杠上端同轴固定设置有驱动锥齿轮,所述驱动锥齿轮外端啮合有主动锥齿轮,所述主动锥齿轮同轴固定设置在触发杆外壁,位于自传套筒下端的所述隔料板中间开设有喂料孔,靠近喂料孔边缘的所述隔料板内部开设有长圆滑腔,所述长圆滑腔内滑动设置有关闭板,所述关闭板中间的空腔向下滑动设置有钢珠,所述钢珠与关闭板之间固定设置有压缩弹簧,所述关闭板两端固定设置有弹簧杆,所述弹簧杆另外一端固定设置在长圆滑腔内壁,所述隔料板下端开设有用于避让钢珠的避让长圆孔;
7.本发明使用时,将施肥设备上的挂载杆挂载到小型农具上,其载具要求能在行进方向上将悬挂系统进行上下左右快速位移调节,将载具行驶到高株农作物中间的行当,向放料桶中注入肥料,肥料沿着放料桶下端的自传套筒流入隔料板中央的喂料孔中的关闭板上端,先将施肥设备移动到农作物根部,使得挂载杆长的一端位于设备的前端右侧(如图2所示,图中左下角为设备的右端,图上方为设备上端,本设备在移动过程中存在旋转交替运动,现以图中载具前进方向为工作方向,站在载具看设备为设备的前端,此后采用设备方向进行叙述),启动载具向前移动,植物根部推动触发杆沿着u环板下端的步进长圆孔向u环板后端进行移动(如图2所示,高株农作物通常根部比较粗壮,且根据力矩远离,通常农作物通常根部刚出土面强度较大,从而能顺利启动设备),触发杆向后移动使得其同轴的步进齿轮在步进齿条上移动,从而使得步进齿轮发生转动,步进齿轮转动后驱动触发杆转动,触发杆边转动边向设备后端进行移动,触发杆向后移动时带动圆环板向设备后端移动,同时的圆环板上端的限位滑块沿着隔料板下端的滑槽向设备后端移动(如图4和5所示,其中转轴套补偿触发杆的转动对圆环板的作用,从而使得圆环板能顺着滑槽向设备后端进行顺利移动),同时的触发杆的转动驱动主动锥齿轮转动,主动锥齿轮转动驱动其下端的驱动锥齿轮转动,驱动锥齿轮转动驱动丝杠在圆环板外壁转动,丝杠在补偿螺母内转动驱动滑动杆沿着圆环板侧壁的开合长圆孔向下移动,当圆环板上端触碰到关闭板下端的钢珠时,随着载具继续移动圆环板推动关闭板克服弹簧杆的弹力沿着长圆滑腔内壁开示滑动,这时肥料穿过喂料孔进入锥形板组成的圆锥中,同时滑动杆继续下降使得两个锥形板组成圆锥形向下移动扎入植株根茎旁的泥土中(如图4和5所示,由于触发杆一直受到植物根茎作用保持相对静止,从而使得载具在移动时,能保持锥形板的竖直位置不变),随着载具继续移动,锥形板继续下降,当锥形板扎入土中后,滑动杆外端触碰到张开顶杆,使得滑动杆靠近圆环板的一端继续下降(如图5所示,补偿螺母的作用为补偿锥形板的转动,造成的滑动杆与丝杠的角度差,从而避免了设备出现卡死现象的出现),从而将两片锥形板打开,使得锥形板中的肥料释放到泥土中,随着载具继续移动,步进齿轮与另外一组相反方向的步进齿条啮合,从而使得触发杆反转,从而使得锥形板关闭且上升(如图4和5所示,具体过程与施肥过程相反在此不做赘述),同时的圆环板挤压钢珠使得关闭板将弹簧杆压缩到极限状态,这时钢珠克服压缩弹簧的弹力向上滑入关闭板内部,从而使得圆环板从下端滑过,同时关闭板受到弹簧杆作用开始回弹将喂料孔关闭,同时圆环板另一端会再次触发关闭板再次进行上述移动,从而使得肥料掉落到刚施肥的孔中,进行二次补施,从而提高泥土中各高度中的肥料施加量,使得施肥更加均匀,当触发杆移动到设备后端时,这时启动电机转动,使得电机绕着
换向齿轮转动,从而使得挂载杆向另外一边倾斜,靠近行距另外一点的植株,同时电机输出齿轮通过变速齿轮驱动自转齿轮旋转一百八十度,从而使得下端的u环板也旋转一百八十度,从而使得触发杆转换到另一端前侧,载具继续向前移动即可(从而完成另一侧的施肥工作,且本设备只进行了行间距左右交错施肥,挂载两个相同设备即可进行左右同时施肥,且在u环板转动时能将设备中的肥料进行颠簸,使得肥料不结块);
8.本发明通过植株根部挤压触发杆,使得触发杆沿着步进长圆孔向设备后端移动,从而使得含有肥料的两块锥形板和植物根部保持静止,再通过步进齿条和步进齿轮的作用可完成触发杆转动,从而通过其外壁的主动锥齿轮间接驱动滑动杆沿着圆环板侧壁的开合长圆孔下移从而完成锥形板插入泥土中的动作,再通过张开顶杆和滑动杆的作用将泥土中的锥形板打开,从而完成定株精确施肥,从而有效解决了现有设备无法对高株农作物进行精确定位施肥,使得肥料浪费田间杂草横行的问题;其次通过相反的步进齿条与步进齿轮作用使得触发杆反转,从而使得锥形板关闭上升,再通过电机驱动u环板转动换边,从而完成了设备的连续性工作,从而提高了精确施肥的效率。
9.作为本发明的进一步方案,所述隔料板中间低两边高的凹形板;使得肥料一直聚集在隔料板中间,避免了隔料板上端出现死角,造成肥料长时间被太阳暴晒出现融化结块的现象出现,堵塞设备的同时,也造成了肥料的浪费。
10.由于电机驱动u环板,从而可能造成隔料板上端的肥料飞到隔料板前后端,从而远离喂料孔,使得肥料长时间受到阳光暴晒高温,造成肥料融化堵塞设备的同时,也造成了肥料的浪费,现希望设计一套清理装置以解决上述问题;本装置使用时,触发杆转动驱动摩擦带转动,摩擦带驱动单向轮转动从而带动防结杆转动,防结杆转动通过毛刷将肥料向喂料孔驱动(如图2所示,采用单向轮,避免了触发杆的正反转时,将肥料扫向隔料板两端远离喂料孔,从而造成的肥料飞出设备,出现浪费的的现象);
11.本发明通过触发杆驱动摩擦带转动从而带动单向轮转动,再驱动防结杆转动,使得防结杆外壁的毛刷将肥料扫向喂料孔,从而解决可设备转动过程中肥料出现离心运动,飞到隔料板前后端,高温造成肥料融化挥发的现象出现。
12.作为本发明的进一步方案,所述步进长圆孔内壁采用减摩材料,减小摩擦,延长设备使用寿命。
13.作为本发明的进一步方案,所述电机采用减速电机,使得设备转动扭矩更大。
14.作为本发明的进一步方案,所述触发杆长端套设有橡胶块,避免触发杆对农作物根茎造成破坏。
15.一种智能型农业施肥方法,该方法的具体操作步骤如下:
16.步骤一:先将施肥设备中注满需要的肥料,本设备采用单一加料斗,从而使得所以肥料均采用单一供应,从而使得在上料时更加方便快捷;
17.步骤二:讲施肥设备挂载到载具上,使用载具拖动施肥设备进行移动,本装置使用外部载具,从而避免了机械资源长时间的放置,使得资源造成浪费;
18.步骤三:启动施肥设备在农作物根部周围移动,使得设备中的触发装置与植物根部接触,从而实现了定点精确施肥,保证了肥料的高效性;
19.步骤四:施肥完成后,将施肥设备清理干净保存。
20.与现有技术相比,本发明的有益效果是:
21.1.本发明通过植株根部挤压触发杆,使得触发杆沿着步进长圆孔向设备后端移动,从而使得含有肥料的两块锥形板和植物根部保持静止,再通过步进齿条和步进齿轮的作用可完成触发杆转动,从而通过其外壁的主动锥齿轮间接驱动滑动杆沿着圆环板侧壁的开合长圆孔下移从而完成锥形板插入泥土中的动作,再通过张开顶杆和滑动杆的作用将泥土中的锥形板打开,从而完成定株精确施肥,从而有效解决了现有设备无法对高株农作物进行精确定位施肥,使得肥料浪费田间杂草横行的问题;其次通过相反的步进齿条与步进齿轮作用使得触发杆反转,从而使得锥形板关闭上升,再通过电机驱动u环板转动换边,从而完成了设备的连续性工作,从而提高了精确施肥的效率。
22.2.本发明采用隔料板中间低两边高的凹形板;使得肥料一直聚集在隔料板中间,避免了隔料板上端出现死角,造成肥料长时间被太阳暴晒出现融化结块的现象出现,堵塞设备的同时,也造成了肥料的浪费。
23.3.本发明通过触发杆驱动摩擦带转动从而带动单向轮转动,再驱动防结杆转动,使得防结杆外壁的毛刷将肥料扫向喂料孔,从而解决可设备转动过程中肥料出现离心运动,飞到隔料板前后端,高温造成肥料融化挥发的现象出现。
附图说明
24.图1为本发明总体结构示意图;
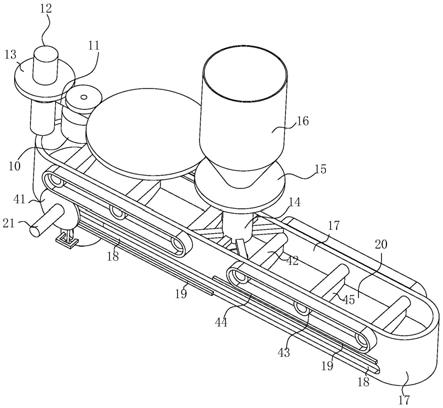
25.图2本发明左前俯视角结构示意图;
26.图3本发明左前俯视角局部剖视结构示意图;
27.图4本发明图3中a处放大结构示意图;
28.图5本发明图4中b处放大结构示意图;
29.图6为本发明左后俯视角局部剖视结构示意图;
30.图7为本发明图6中c处放大结构示意图;
31.图8为本发明图7中d处放大结构示意图;
32.图9为本发明方法流程结构示意图。
33.附图中,各标号所代表的部件列表如下:
34.电机10,挂载架11,挂载杆12,换向齿轮13,自传套筒14,自转齿轮15,放料桶16,u环板17,步进长圆孔18,步进齿条19,隔料板20,触发杆21,步进齿轮22,转轴套23,圆环板24,限位滑块25,滑槽26,开合长圆孔27,滑动杆28,锥形板29,补偿螺母30,丝杠31,张开顶杆32,驱动锥齿轮33,主动锥齿轮34,喂料孔35,长圆滑腔36,关闭板37,钢珠38,压缩弹簧39,弹簧杆40,摩擦轮41,防结杆42,单向轮43,摩擦带44,毛刷45。
具体实施方式
35.请参阅图1-9,本发明提供一种技术方案:一种智能型农业施肥系统包括电机10和挂载架11,挂载架11前端固定转动设置有挂载杆12,挂载杆12同轴固定设置有换向齿轮13,换向齿轮13啮合在电机10输出轴上的输出齿轮外侧,挂载架11远离挂载杆12的一端转动设置有自转套筒14,自传套筒14同轴固定连接有自转齿轮15,自传齿轮15外侧通过变速齿轮传动连接再电机10输出轴上的输出齿轮外侧,自传套筒14上端固定设置有放料桶16,自传套筒14下端外壁通过支架固定设置有u环板17,u环板17下端两侧壁开设有长通的步进长圆
孔18,步进长圆孔18边缘的u环板17外侧壁固定设置有两根关于u环板17中心轴线对称的步进齿条19,u环板17中间侧壁水平固定设置有隔料板20,步进长圆孔18内套设有触发杆21,触发杆21一端远超出u环板17侧壁,触发杆21同轴固定设置有两个与步进齿条19相啮合的步进齿轮22,位于u环板17中间的触发杆21外壁通过转轴套23转动设置有圆环板24,圆环板24上端固定设置有两个对称的限位滑块25,限位滑块25滑动设置在隔料板20下端开设的滑槽26内壁,圆环板24侧壁对称开设有开合长圆孔27,开合长圆孔27侧壁滑动设置有两个滑动杆28,两个滑动杆28位于圆环板24内部的一端均固定设置有半块尖头向下的锥形板29,位于圆环板24外端的滑动杆28中间转动竖向转动设置有补偿螺母30,补偿螺母30中间螺接有丝杠31,丝杠31通过支架转动设置在圆环板24外侧壁,靠近开合长圆孔27边缘下侧的圆环板24外壁固定设置有用于阻挡滑动杆28的张开顶杆32,丝杠31上端同轴固定设置有驱动锥齿轮33,驱动锥齿轮33外端啮合有主动锥齿轮34,主动锥齿轮34同轴固定设置在触发杆21外壁,位于自传套筒14下端的隔料板20中间开设有喂料孔35,靠近喂料孔35边缘的隔料板20内部开设有长圆滑腔36,长圆滑腔36内滑动设置有关闭板37,关闭板37中间的空腔向下滑动设置有钢珠38,钢珠38与关闭板37之间固定设置有压缩弹簧39,关闭板37两端固定设置有弹簧杆40,弹簧杆40另外一端固定设置在长圆滑腔36内壁,隔料板20下端开设有用于避让钢珠38的避让长圆孔;
36.本发明使用时,将施肥设备上的挂载杆12挂载到小型农具上,其载具要求能在行进方向上将悬挂系统进行上下左右快速位移调节,将载具行驶到高株农作物中间的行当,向放料桶16中注入肥料,肥料沿着放料桶16下端的自传套筒14流入隔料板20中央的喂料孔35中的关闭板37上端,先将施肥设备移动到农作物根部,使得挂载杆12长的一端位于设备的前端右侧(如图2所示,图中左下角为设备的右端,图上方为设备上端,本设备在移动过程中存在旋转交替运动,现以图2中载具前进方向为工作方向,站在载具看设备为设备的前端,此后采用设备方向进行叙述),启动载具向前移动,植物根部推动触发杆21沿着u环板17下端的步进长圆孔18向u环板17后端进行移动(如图2所示,高株农作物通常根部比较粗壮,且根据力矩远离,通常农作物通常根部刚出土面强度较大,从而能顺利启动设备),触发杆21向后移动使得其同轴的步进齿轮22在步进齿条19上移动,从而使得步进齿轮22发生转动,步进齿轮22转动后驱动触发杆21转动,触发杆21边转动边向设备后端进行移动,触发杆21向后移动时带动圆环板24向设备后端移动,同时的圆环板24上端的限位滑块25沿着隔料板20下端的滑槽26向设备后端移动(如图4和5所示,其中转轴套23补偿触发杆21的转动对圆环板24的作用,从而使得圆环板24能顺着滑槽26向设备后端进行顺利移动),同时的触发杆21的转动驱动主动锥齿轮34转动,主动锥齿轮34转动驱动其下端的驱动锥齿轮33转动,驱动锥齿轮33转动驱动丝杠31在圆环板24外壁转动,丝杠31在补偿螺母30内转动驱动滑动杆28沿着圆环板24侧壁的开合长圆孔27向下移动,当圆环板24上端触碰到关闭板37下端的钢珠38时,随着载具继续移动圆环板24推动关闭板37克服弹簧杆40的弹力沿着长圆滑腔36内壁开示滑动,这时肥料穿过喂料孔35进入锥形板29组成的圆锥中,同时滑动杆28继续下降使得两个锥形板29组成圆锥形向下移动扎入植株根茎旁的泥土中(如图4和5所示,由于触发杆21一直受到植物根茎作用保持相对静止,从而使得载具在移动时,能保持锥形板29的竖直位置不变),随着载具继续移动,锥形板29继续下降,当锥形板29扎入土中后,滑动杆28外端触碰到张开顶杆32,使得滑动杆28靠近圆环板24的一端继续下降(如图5所示,补偿
螺母30的作用为补偿锥形板29的转动,造成的滑动杆28与丝杠31的角度差,从而避免了设备出现卡死现象的出现),从而将两片锥形板29打开,使得锥形板29中的肥料释放到泥土中,随着载具继续移动,步进齿轮22与另外一组相反方向的步进齿条19啮合,从而使得触发杆21反转,从而使得锥形板29关闭且上升(如图4和5所示,具体过程与施肥过程相反在此不做赘述),同时的圆环板24挤压钢珠38使得关闭板37将弹簧杆40压缩到极限状态,这时钢珠38克服压缩弹簧39的弹力向上滑入关闭板37内部,从而使得圆环板24从下端滑过,同时关闭板37受到弹簧杆40作用开始回弹将喂料孔35关闭,同时圆环板24另一端会再次触发关闭板37再次进行上述移动,从而使得肥料掉落到刚施肥的孔中,进行二次补施,从而提高泥土中各高度中的肥料施加量,使得施肥更加均匀,当触发杆21移动到设备后端时,这时启动电机10转动,使得电机10绕着换向齿轮13转动,从而使得挂载杆12向另外一边倾斜,靠近行距另外一点的植株,同时电机输出齿轮通过变速齿轮驱动自转齿轮15旋转一百八十度,从而使得下端的u环板17也旋转一百八十度,从而使得触发杆21转换到另一端前侧,载具继续向前移动即可(从而完成另一侧的施肥工作,且本设备只进行了行间距左右交错施肥,挂载两个相同设备即可进行左右同时施肥,且在u环板17转动时能将设备中的肥料进行颠簸,使得肥料不结块);
37.本发明通过植株根部挤压触发杆21,使得触发杆21沿着步进长圆孔18向设备后端移动,从而使得含有肥料的两块锥形板29和植物根部保持静止,再通过步进齿条19和步进齿轮22的作用可完成触发杆21转动,从而通过其外壁的主动锥齿轮34间接驱动滑动杆28沿着圆环板24侧壁的开合长圆孔27下移从而完成锥形板29插入泥土中的动作,再通过张开顶杆32和滑动杆28的作用将泥土中的锥形板29打开,从而完成定株精确施肥,从而有效解决了现有设备无法对高株农作物进行精确定位施肥,使得肥料浪费田间杂草横行的问题;其次通过相反的步进齿条19与步进齿轮22作用使得触发杆21反转,从而使得锥形板29关闭上升,再通过电机10驱动u环板17转动换边,从而完成了设备的连续性工作,从而提高了精确施肥的效率。
38.作为本发明的进一步方案,隔料板20中间低两边高的凹形板;使得肥料一直聚集在隔料板20中间,避免了隔料板20上端出现死角,造成肥料长时间被太阳暴晒出现融化结块的现象出现,堵塞设备的同时,也造成了肥料的浪费。
39.由于电机10驱动u环板17,从而可能造成隔料板20上端的肥料飞到隔料板20前后端,从而远离喂料孔35,使得肥料长时间受到阳光暴晒高温,造成肥料融化堵塞设备的同时,也造成了肥料的浪费,现希望设计一套清理装置以解决上述问题;本装置使用时,触发杆21转动驱动摩擦带44转动,摩擦带44驱动单向轮43转动从而带动防结杆42转动,防结杆42转动通过毛刷45将肥料向喂料孔35驱动(如图2所示,采用单向轮43,避免了触发杆21的正反转时,将肥料扫向隔料板20两端远离喂料孔35,从而造成的肥料飞出设备,出现浪费的的现象);
40.本发明通过触发杆21驱动摩擦带44转动从而带动单向轮43转动,再驱动防结杆42转动,使得防结杆42外壁的毛刷45将肥料扫向喂料孔35,从而解决可设备转动过程中肥料出现离心运动,飞到隔料板20前后端,高温造成肥料融化挥发的现象出现。
41.作为本发明的进一步方案,步进长圆孔18内壁采用减摩材料,减小摩擦,延长设备使用寿命。
42.作为本发明的进一步方案,电机10采用减速电机,使得设备转动扭矩更大。
43.作为本发明的进一步方案,触发杆21长端套设有橡胶块,避免触发杆21对农作物根茎造成破坏。
44.一种智能型农业施肥方法,该方法的具体操作步骤如下:
45.步骤一:先将施肥设备中注满需要的肥料,本设备采用单一加料斗,从而使得所以肥料均采用单一供应,从而使得在上料时更加方便快捷;
46.步骤二:讲施肥设备挂载到载具上,使用载具拖动施肥设备进行移动,本装置使用外部载具,从而避免了机械资源长时间的放置,使得资源造成浪费;
47.步骤三:启动施肥设备在农作物根部周围移动,使得设备中的触发装置与植物根部接触,从而实现了定点精确施肥,保证了肥料的高效性;
48.步骤四:施肥完成后,将施肥设备清理干净保存。
49.工作原理:本发明使用时,将施肥设备上的挂载杆12挂载到小型农具上,其载具要求能在行进方向上将悬挂系统进行上下左右快速位移调节,将载具行驶到高株农作物中间的行当,向放料桶16中注入肥料,肥料沿着放料桶16下端的自传套筒14流入隔料板20中央的喂料孔35中的关闭板37上端,先将施肥设备移动到农作物根部,使得挂载杆12长的一端位于设备的前端右侧(如图2所示,图中左下角为设备的右端,图上方为设备上端,本设备在移动过程中存在旋转交替运动,现以图2中载具前进方向为工作方向,站在载具看设备为设备的前端,此后采用设备方向进行叙述),启动载具向前移动,植物根部推动触发杆21沿着u环板17下端的步进长圆孔18向u环板17后端进行移动(如图2所示,高株农作物通常根部比较粗壮,且根据力矩远离,通常农作物通常根部刚出土面强度较大,从而能顺利启动设备),触发杆21向后移动使得其同轴的步进齿轮22在步进齿条19上移动,从而使得步进齿轮22发生转动,步进齿轮22转动后驱动触发杆21转动,触发杆21边转动边向设备后端进行移动,触发杆21向后移动时带动圆环板24向设备后端移动,同时的圆环板24上端的限位滑块25沿着隔料板20下端的滑槽26向设备后端移动(如图4和5所示,其中转轴套23补偿触发杆21的转动对圆环板24的作用,从而使得圆环板24能顺着滑槽26向设备后端进行顺利移动),同时的触发杆21的转动驱动主动锥齿轮34转动,主动锥齿轮34转动驱动其下端的驱动锥齿轮33转动,驱动锥齿轮33转动驱动丝杠31在圆环板24外壁转动,丝杠31在补偿螺母30内转动驱动滑动杆28沿着圆环板24侧壁的开合长圆孔27向下移动,当圆环板24上端触碰到关闭板37下端的钢珠38时,随着载具继续移动圆环板24推动关闭板37克服弹簧杆40的弹力沿着长圆滑腔36内壁开示滑动,这时肥料穿过喂料孔35进入锥形板29组成的圆锥中,同时滑动杆28继续下降使得两个锥形板29组成圆锥形向下移动扎入植株根茎旁的泥土中(如图4和5所示,由于触发杆21一直受到植物根茎作用保持相对静止,从而使得载具在移动时,能保持锥形板29的竖直位置不变),随着载具继续移动,锥形板29继续下降,当锥形板29扎入土中后,滑动杆28外端触碰到张开顶杆32,使得滑动杆28靠近圆环板24的一端继续下降(如图5所示,补偿螺母30的作用为补偿锥形板29的转动,造成的滑动杆28与丝杠31的角度差,从而避免了设备出现卡死现象的出现),从而将两片锥形板29打开,使得锥形板29中的肥料释放到泥土中,随着载具继续移动,步进齿轮22与另外一组相反方向的步进齿条19啮合,从而使得触发杆21反转,从而使得锥形板29关闭且上升(如图4和5所示,具体过程与施肥过程相反在此不做赘述),同时的圆环板24挤压钢珠38使得关闭板37将弹簧杆40压缩到极限状态,这时钢
珠38克服压缩弹簧39的弹力向上滑入关闭板37内部,从而使得圆环板24从下端滑过,同时关闭板37受到弹簧杆40作用开始回弹将喂料孔35关闭,同时圆环板24另一端会再次触发关闭板37再次进行上述移动,从而使得肥料掉落到刚施肥的孔中,进行二次补施,从而提高泥土中各高度中的肥料施加量,使得施肥更加均匀,当触发杆21移动到设备后端时,这时启动电机10转动,使得电机10绕着换向齿轮13转动,从而使得挂载杆12向另外一边倾斜,靠近行距另外一点的植株,同时电机输出齿轮通过变速齿轮驱动自转齿轮15旋转一百八十度,从而使得下端的u环板17也旋转一百八十度,从而使得触发杆21转换到另一端前侧,载具继续向前移动即可(从而完成另一侧的施肥工作,且本设备只进行了行间距左右交错施肥,挂载两个相同设备即可进行左右同时施肥,且在u环板17转动时能将设备中的肥料进行颠簸,使得肥料不结块)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。