1.本发明涉及曝光装置以及物品的制造方法。
背景技术:
2.在曝光装置中,需要通过高精度地测量载置台的位置来提高曝光性能。
3.而且,在使用干涉仪测量载置台的位置时,需要注意朝向载置台射出的测量光的波长的变化。
4.即,在测量光传输的空间的温度、湿度或者气压等环境发生变化时,与其相伴地,空间的折射率发生变化,因此测量光的波长发生变化,所以在利用干涉仪测量载置台的位置时产生误差。
5.日本特开2008-145203号公报公开了一种曝光装置,该曝光装置根据从空气振动源至干涉仪的光路以及波长检测器各自的距离之间的差,校正来自干涉仪的测量光的波长,从而校正与来自空气振动源的声波的影响相伴的干涉仪的测量值的变化。
6.另外,在当对基板进行曝光时使载置台往返移动的曝光装置中,从干涉仪射出的用于测量载置台的位置的测量光传输的空间的环境、特别是气压随时间变化,因此空间的折射率进而测量光的波长随时间变化。
7.另一方面,在日本特开2008-145203号公报公开的曝光装置中,根据从空气振动源至干涉仪的光路的距离来校正测量光的波长,未考虑这样的与载置台的移动相伴的测量光的波长的时间变化。
技术实现要素:
8.因此,本发明的目的在于提供一种能够考虑载置台的移动而校正载置台的位置的测量结果从而提高曝光性能的曝光装置。
9.本发明所涉及的曝光装置以将形成于原版的图案转印到基板的方式对基板进行曝光,其特征在于,具备:第1载置台,配置有与第1方向垂直的第1反射面,并且一边保持基板及原版中的一方,一边在第1方向上以预定的频率往返移动;第1测量部,通过在朝向第1反射面射出第1测量光之后对由第1反射面反射的第1测量光进行接收,测量第1载置台在第1方向上的位置;第2载置台,配置有与第1方向垂直的第2反射面,并且保持基板及原版中的另一方;第2测量部,通过在朝向第2反射面射出第2测量光之后对由第2反射面反射的第2测量光进行接收,测量第2载置台在第1方向上的位置;第3测量部,比第2载置台接近第1载置台地配置,并且测量在内部传输的第3测量光的波长;以及控制部,根据第3测量部的测量结果和预定的频率,校正第2测量部的测量结果。
10.根据以下参照附图对示例性实施例的描述,本发明的其他特征将变得清楚。
附图说明
11.图1a是第一实施方式所涉及的曝光装置的部分放大示意性剖面图。
12.图1b是第一实施方式所涉及的曝光装置的部分放大示意性剖面图。
13.图2a是示意性地示出第一实施方式所涉及的曝光装置中的测量光的波长的时间变化的图。
14.图2b是示意性地示出第一实施方式所涉及的曝光装置中的测量光的波长的时间变化的图。
15.图3是示出在第一实施方式所涉及的曝光装置中取得测量光的波长的时间变化中包含的预定的频率区域的分量的处理的流程图。
16.图4是第二实施方式所涉及的曝光装置的部分放大示意性俯视图。
具体实施方式
17.以下,根据添附的附图来详细说明本实施方式所涉及的曝光装置。此外,在以下所示的附图中,为了能够容易地理解本实施方式,以与实际不同的比例尺描绘。
18.另外以下,将与基板载置台的基板载置面垂直的方向定义为z方向,将在基板载置面内相互正交的(垂直的)两个方向分别定义为x方向以及y方向。
19.[第一实施方式]
[0020]
设置于曝光装置的载置台的定位精度的提高由于直接关系到曝光性能而极其重要。
[0021]
而且,为了提高载置台的定位精度,需要提高干涉仪等用于测量载置台的位置的单元的测量精度。
[0022]
另外,在由于测量光传输的空间的环境发生变化而测量光的波长发生变化时,在干涉仪的测量结果中产生误差。
[0023]
而且以往,作为校正这样的误差的单元,使用能够通过比较在真空空间中传输的参照光以及在预定的空间中传输的测量光各自的波长来检测与预定的空间的环境的变化相伴的测量光的波长的变化量的波长跟踪器。
[0024]
一般,波长跟踪器的尺寸较大,所以有时无法配置于来自干涉仪的测量光传输的光路的附近。
[0025]
另外,在曝光装置中,设置有保持基板而移动的基板载置台和保持原版而移动的原版载置台。
[0026]
因此,在想要在各载置台设置波长跟踪器时,成本、工作量以及尺寸增大。
[0027]
因此,本实施方式的目的在于提供一种能够在抑制成本、工作量以及尺寸的增大的同时通过高精度地校正载置台的位置的测量误差来提高载置台的定位精度的曝光装置。
[0028]
具体而言,根据本实施方式,使用基于如以下所示接近设置有基板载置台的空间而配置的波长跟踪器的测量结果,推测用于测量原版载置台的位置的测量光传输的空间的环境的变化。
[0029]
而且,通过推测该测量光的波长的变化量并根据推测出的波长的变化量校正原版载置台的位置的测量结果,实现载置台的定位精度的提高。
[0030]
更具体而言,为了测量设置于曝光装置的基板载置台、原版载置台等载置台的位置,采用使用干涉仪的测长系统。
[0031]
使用干涉仪的测长系统根据测量光的波长进行位置测量。
[0032]
因此,在测量载置台的位置时,如果与测量光传输的空间的环境、即、温度、湿度或者气压等的变化相应地空间内的气体、即、空气的折射率发生变化,则传输的测量光的波长发生变化。
[0033]
在该情况下,在载置台的位置的测量结果中产生误差,因此载置台的定位精度降低。
[0034]
因此,在使用设置于曝光装置的干涉仪的测长系统中,需要与测量光的波长的变化相应地校正测量值。
[0035]
作为校正干涉仪中的测量光的波长的方法,有以下方法:检测测量光传输的路径的环境、即、温度、湿度、气压的大小,根据检测到的结果来计算测量光传输的路径中的折射率的变化。
[0036]
另外,作为这样的方法的一个例子,有以下方法:通过分别利用在真空空间内传输的参照光和在预定的空间内传输的测量光测量同一测量对象的位置并比较双方的测量值,计算预定的空间内的折射率。
[0037]
这样的校正方法在被称为波长跟踪器或者波长补偿器的、从使用干涉仪的测长系统的制造商提供的装置中使用。
[0038]
在此,在将在预定的空间内传输的测量光的波长设为λ、将在真空空间内传输的参照光的波长设为λv、将预定的空间的折射率设为n时,满足以下的式(1)。
[0039]
λ=λv/n
···
(1)
[0040]
即,波长跟踪器能够测量预定的空间内的折射率n,通过掌握预定的空间内的折射率n,能够计算测量光的波长λ。
[0041]
而且如上所述,干涉仪是用于根据测量光的波长及相位来测量位置的传感器,所以在测量光的波长发生变化时,在位置的测量结果中产生误差。
[0042]
因此,如果能够准确地计算测量光的波长,则能够校正基于干涉仪的位置的测量结果中的误差。
[0043]
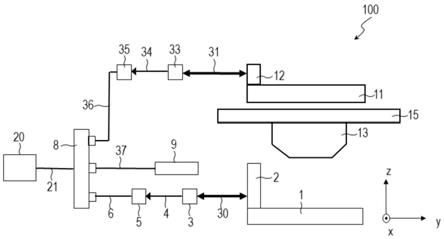
图1a及图1b示出第一实施方式所涉及的曝光装置100的部分放大示意性剖面图。
[0044]
如图1a及图1b所示,本实施方式所涉及的曝光装置100具备基板载置台1(第1载置台)、原版载置台11(第2载置台)以及投影光学系统13。
[0045]
而且,在本实施方式所涉及的曝光装置100中,能够以使用来自未图示的光源的曝光的光将形成于未图示的原版的图案转印到未图示的基板的方式进行曝光。
[0046]
在此,由保持部15保持的投影光学系统13将通过未图示的原版后的曝光的光向未图示的基板上导光。
[0047]
另外,在本实施方式所涉及的曝光装置100中,如以下所示利用使用干涉仪的测长系统来测量基板载置台1以及原版载置台11各自的位置。
[0048]
基板载置台1能够保持未图示的晶圆等基板而至少在y方向(第1方向)上扫描移动并且在x方向上步进移动。
[0049]
而且,在基板载置台1上配置有用于测量基板载置台1在y方向上的位置的反射镜2(第1反射面),位置测量用的测量光30(测长波束、第1测量光)在干涉仪3(第1测量部、第1干涉仪)与反射镜2之间传输。
[0050]
即,干涉仪3在朝向反射镜2射出测量光30之后对由反射镜2反射的测量光30进行
接收。
[0051]
然后,根据由反射镜2反射的测量光30与未图示的参照光(第1参照光)的干涉,测量干涉仪3与反射镜2之间的距离。
[0052]
接下来,从干涉仪3向光拾取器5射出通过使由反射镜2反射的测量光30和未图示的参照光相互干涉而得到的干涉光4。
[0053]
然后,光拾取器5在对干涉光4进行接收之后,经由光纤6将干涉光4输出给信号处理基板8。
[0054]
然后,信号处理基板8通过对输入的干涉光4进行光电变换,计算基板载置台1在y方向上的位置。
[0055]
另外,从用于检测空间的折射率的波长跟踪器9(第3测量部)输出的测量光经由光纤37输入到信号处理基板8。
[0056]
如上所述,波长跟踪器9通过分别利用在真空空间内传输的测量光(第4测量光)和在预定的空间内传输的测量光(第3测量光)测量同一测量对象的位置并比较双方的测量值,计算预定的空间内的折射率。
[0057]
换言之,波长跟踪器9比原版载置台11接近基板载置台1地配置,通过测量在内部传输的测量光的波长,能够计算设置有基板载置台1的空间的折射率。
[0058]
然后,信号处理基板8将由波长跟踪器9取得的设置有基板载置台1的空间的折射率的测量值经由线缆21传送给波长校正单元20(控制部)。
[0059]
之后,波长校正单元20根据从信号处理基板8传送的折射率的值,实时地计算在设置有基板载置台1的空间内传输的测量光30的波长的变化量。
[0060]
然后,波长校正单元20使用计算出的测量光30的波长的变化量,校正基板载置台1在y方向上的位置的测量结果。
[0061]
另外,在本实施方式所涉及的曝光装置100中,使用与上述同样的方法,还测量保持未图示的原版而在y方向上扫描移动的原版载置台11在y方向上的位置。
[0062]
即,如图1a及图1b所示,位置测量用的测量光31(测长波束、第2测量光)在设置于原版载置台11上的反射镜12(第2反射面)与干涉仪33(第2测量部、第2干涉仪)之间传输。
[0063]
换言之,干涉仪33通过在朝向反射镜12射出测量光31之后对由反射镜12反射的测量光31进行接收,测量原版载置台11在y方向上的位置。
[0064]
然后,从干涉仪33向光拾取器35射出通过使由反射镜12反射的测量光31和未图示的参照光(第2参照光)相互干涉而得到的干涉光34。
[0065]
接下来,光拾取器35在对干涉光34进行接收之后,经由光纤36将干涉光34输出给信号处理基板8。
[0066]
然后,信号处理基板8通过对输入的干涉光34进行光电变换,计算原版载置台11在y方向上的位置。
[0067]
接下来,说明在本实施方式所涉及的曝光装置100中校正原版载置台11在y方向上的位置的测量结果的方法。
[0068]
在曝光装置中,在配置有原版载置台11的空间以及配置有基板载置台1的空间分别设置波长跟踪器导致装置的大型化,因此不优选。
[0069]
因此,在以往的曝光装置中,有原版载置台11以及基板载置台1各自被配置的空间
的环境、即、温度、湿度以及气压相互相同这样的前提。
[0070]
然后,据此,使用由设置于配置有基板载置台1的空间的波长跟踪器9计算出的折射率的值,校正原版载置台11的位置的测量结果。
[0071]
然而,在使用扫描曝光装置进行曝光的情况下,一般地,基板载置台1以及原版载置台11分别在彼此相逆的方向上扫描移动。
[0072]
即,如图1b所示,例如在基板载置台1在 y方向上扫描移动的情况下,原版载置台11在-y方向上扫描移动。
[0073]
换言之,原版载置台11以在基板载置台向y方向的一方的朝向移动时向另一方的朝向移动的方式在y方向上以与基板载置台1相同的频率f往返移动。
[0074]
而且,预定的空间中的气压与由于设置于该空间内的载置台移动而产生的风压相应地变化。
[0075]
因此,由于基板载置台1在 y方向上扫描移动,设置有基板载置台1的空间的气压发生变化,另一方面,由于原版载置台11在-y方向上扫描移动,设置有原版载置台11的空间的气压发生变化。
[0076]
具体而言,在基板载置台1在 y方向上扫描移动的情况下,用于测量基板载置台1在y方向上的位置的测量光30传输的空间内的空气膨胀,所以该空间的气压减少。
[0077]
另一方面,在与基板载置台的向 y方向的扫描移动同步地原版载置台11在-y方向上扫描移动时,用于测量原版载置台11在y方向上的位置的测量光31传输的空间内的空气被压缩,所以该空间的气压增大。
[0078]
另外,为了分别针对形成于未图示的基板上的多个拍摄区域进行曝光,基板载置台1周期性地反复进行 y方向的扫描移动和-y方向的扫描移动。
[0079]
另一方面,原版载置台11以与基板载置台1相逆的相位反复进行-y方向的扫描移动和 y方向的扫描移动。
[0080]
因此,测量光31传输的空间内的气压和测量光30传输的空间内的气压分别以成为彼此相逆的相位的方式周期性地随时间变化。
[0081]
另外,一般地,原版载置台11以比基板载置台1大的速度扫描移动,所以设置有原版载置台11的空间中的气压的时间变化的振幅和设置有基板载置台1的空间中的气压的时间变化的振幅也相互不同。
[0082]
在本实施方式所涉及的曝光装置100中,利用上述特征,使用由设置于配置有基板载置台1的空间的波长跟踪器9计算出的折射率的值,如以下所述校正原版载置台11在y方向上的位置的测量结果。
[0083]
图2a示意性地示出在本实施方式所涉及的曝光装置100中在对预定的基板进行曝光时由波长跟踪器9测量的测量光的波长λw的时间变化。
[0084]
此外,在此由波长跟踪器9测量的测量光的波长λw的时间变化等价于与设置有波长跟踪器9的空间的环境、即、温度、湿度或者气压的变化相伴的该空间的折射率的时间变化。
[0085]
另外,波长跟踪器9设置于配置有基板载置台1的空间、即、测量光30传输的空间,所以图2a所示的波长λw的时间变化可以认为是测量光30的波长的时间变化。
[0086]
在如本实施方式所涉及的曝光装置100那样精密地控制曝光装置内的空间的温度
的情况下,相对于空间的折射率的变化,该空间的气压的变动成为支配性的。
[0087]
而且,在基板载置台1扫描移动时由波长跟踪器9测量的测量光的波长的时间变化λw(t)能够如以下的式(2)那样表示。
[0088]
λw(t)=λ
wlow
(t) λ
whigh
(t)
···
(2)
[0089]
在此,λ
wlow
(t)是基于大气压的时间变化的分量,λ
whigh
(t)是基于在基板载置台1扫描移动时产生的风压的时间变化的分量。
[0090]
在此,认为λ
whigh
(t)根据在对基板的多个拍摄区域进行曝光时基板载置台1以预定的频率往返地进行的多次扫描移动而随时间变化。
[0091]
即,例如在基板载置台1的扫描移动的频率是f[hz]的情况下,λ
whigh
(t)也以频率f[hz]变化。
[0092]
此时λ
whigh
(t)如以下的式(3)那样表示。
[0093][0094]
即,伴随在时刻t为t0至t1之间基板载置台1进行多次扫描移动,λ
whigh
(t)能够通过以振幅m以及频率f随时间变化的正弦函数表示。
[0095]
另一方面,大气压以非常低的频率随时间变化,所以认为λ
wlow
(t)以比基板载置台1的扫描移动的频率f充分低的频率随时间变化。
[0096]
根据以上,可以认为由波长跟踪器9测量的测量光的波长λw如图2a所示那样随时间变化。
[0097]
此外,由波长跟踪器9测量的测量光的波长的时间变化λw(t)中的由于基板载置台1的扫描移动而变动的分量λ
whigh
(t)的周期ts在扫描移动的频率f是5hz的情况下成为ts=1/f=0.2秒。
[0098]
而且,如上所述基板载置台1以及原版载置台11分别在彼此相逆的方向上扫描移动。
[0099]
因此,测量光31传输的空间内的气压的时间变化和测量光30传输的空间内的气压的时间变化成为彼此相逆的相位。
[0100]
因此,在将波长跟踪器设置于配置有原版载置台11的空间的情况下,认为由该波长跟踪器测量的测量光的波长的时间变化、即、测量光31的波长的时间变化相对于测量光30的波长的时间变化成为逆相位。
[0101]
另外,原版载置台11的扫描移动速度和基板载置台1的扫描移动速度也相互不同,所以认为测量光31的波长的时间变化的振幅和测量光30的波长的时间变化的振幅也相互不同。
[0102]
考虑以上,测量光31的波长的时间变化λr(t)能够如以下的式(4)那样表示。
[0103]
λr(t)=λ
rlow
(t) λ
rhigh
(t)
···
(4)
[0104]
在此,λ
rhigh
(t)是
[0105][0106]
a是与原版载置台11的扫描移动中的最大速度相对于基板载置台1的扫描移动中
的最大速度的比相伴的系数(预定的系数)。
[0107]
另一方面,认为大气压的时间变化在配置有原版载置台11的空间和配置有基板载置台1的空间中相互相等,所以能够认为满足以下的式(5)。
[0108]
λ
rlow
(t)=λ
wlow
(t)
···
(5)
[0109]
根据以上,测量光31的波长的时间变化λr(t)能够如以下的式(6)那样改写。
[0110]
λr(t)=λ
wlow
(t)-aλ
whigh
(t)
···
(6)
[0111]
图2b示出在本实施方式所涉及的曝光装置100中通过上述所示的方法求出的测量光31的波长的时间变化λr(t)。
[0112]
如以上所述,来自干涉仪3的测量光30以及波长跟踪器9中的测量光各自的波长与基板载置台1的移动相应地变化,另一方面,来自干涉仪33的测量光31的波长与原版载置台11的移动相应地变化。
[0113]
然后,根据由设置于配置有基板载置台1的空间的波长跟踪器9测量到的值,推测来自用于测量原版载置台11在y方向上的位置的干涉仪33的测量光31传输的空间的气压的时间变化。
[0114]
然后,推测测量光31的波长的时间变化,校正由干涉仪33得到的原版载置台11在y方向上的位置的测量结果。
[0115]
由此,无需在配置有原版载置台11的空间设置波长跟踪器,而能够提高基于干涉仪33的原版载置台11在y方向上的位置的测量精度。
[0116]
接下来,说明从由波长跟踪器9测量的测量光的波长的时间变化λw(t)将λ
wlow
(t)及λ
whigh
(t)相互分离的方法。
[0117]
图3示出在本实施方式所涉及的曝光装置100中从由波长跟踪器9测量的测量光的波长的时间变化λw(t)将λ
wlow
(t)及λ
whigh
(t)相互分离的处理的流程图。
[0118]
首先,为了从由波长跟踪器9测量的测量光的波长的时间变化λw(t)去除噪声分量,将来自波长跟踪器9的输出输入给未图示的第1低通滤波器(步骤s1)。
[0119]
此时,以比基板载置台1的扫描移动的频率f充分高的频率随时间变化的噪声分量需要被去除,另一方面,与频率f相应地随时间变化的分量λ
whigh
(t)需要被正确地提取。
[0120]
因此,第1低通滤波器的截止频率设定为比基板载置台1的扫描移动的频率f大的值。
[0121]
即,用于测量基板载置台1在y方向上的位置的测量光30的波长的时间变化λw(t)能够如以下的式(7)那样表示。
[0122]
λw(t)=λ
wlpf_high
(t)
···
(7)
[0123]
另外,基板载置台1的扫描移动的频率f取决于基板载置台1的扫描移动中的速度、行程,所以可以使第1低通滤波器的截止频率与这些相应地变化。
[0124]
换言之,第1低通滤波器的截止频率、即、由第1低通滤波器选择的预定的频率区域根据基板载置台1的扫描移动的频率f而决定。
[0125]
然后,将此时的第1低通滤波器的输出值表示为λ
wlpf_high
(t)。
[0126]
接下来,如上所述λ
wlow
(t)是以比基板载置台1的扫描移动的频率f充分低的频率随时间变化的分量。
[0127]
因此,为了从由波长跟踪器9测量的测量光的波长的时间变化λw(t)提取λ
wlow
(t),
将来自波长跟踪器9的输出输入给具有比频率f充分低的截止频率的第2低通滤波器(步骤s2)。在此,比频率f充分低的截止频率例如是指0.1hz。
[0128]
然后,设为将此时的第2低通滤波器的输出值表示为λ
wlpf_low
(t)。
[0129]
根据以上,λ
wlow
(t)能够与第2低通滤波器的输出值λ
wlpf_low
(t)如以下的式(8)那样对应起来。
[0130]
λ
wlow
(t)=λ
wlpf_low
(t)
···
(8)
[0131]
另外,λ
whigh
(t)能够与第1低通滤波器及第2低通滤波器各自的输出值λ
wlpf_high
(t)及λ
wlpf_low
(t)如以下的式(9)那样对应起来。
[0132]
λ
whigh
(t)=λ
wlpf_high
(t)-λ
wlpf_low
(t)
···
(9)
[0133]
这样,根据式(8)及式(9),能够从λ
wlpf_high
(t)及λ
wlpf_low
(t)取得λ
wlow
(t)以及λ
whigh
(t)(步骤s3)。
[0134]
然后,测量光31的波长的时间变化λr(t)能够通过将式(8)及式(9)代入到式(6)而如以下的式(10)那样表示。
[0135]
λr(t)=λ
wlpf_low
(t)-a(λ
wlpf_high
(t)-λ
wlpf_low
(t))
···
(10)
[0136]
在此,包含于式(10)的系数a的值由原版载置台11及基板载置台1各自的扫描移动中的最大速度之间的比决定,但不限于此,也可以决定为如改善覆盖(overlay)精度的预定的值。
[0137]
如以上所述,在本实施方式所涉及的曝光装置100中,利用干涉仪3测量基板载置台1在y方向上的位置(第1测量步骤),并且利用干涉仪33测量原版载置台11在y方向上的位置(第2测量步骤)。
[0138]
然后,通过利用波长跟踪器9对测量光的波长进行测量(第3测量步骤)并将由波长跟踪器9测量到的测量光的波长的时间变化输入给低通滤波器,取得该测量光的波长的时间变化中的预定的频率区域的分量。
[0139]
具体而言,将由波长跟踪器9测量到的测量光的波长的时间变化分别输入给具有比扫描移动的频率f高的第1截止频率的第1低通滤波器和具有比频率f低的第2截止频率的第2低通滤波器。由此,分别取得由波长跟踪器9测量到的测量光的波长的时间变化中的第1频率区域的分量以及第2频率区域的分量。
[0140]
即,在本实施方式所涉及的曝光装置100中,从波长跟踪器9的测量值λw(t)分别提取预定的频率区域的分量λ
wlpf_high
(t)以及λ
wlpf_low
(t)。另外,将它们之间的差乘以增益a。
[0141]
然后,计算用于测量原版载置台11在y方向上的位置的干涉仪33的测量光31的波长的时间变化λr(t),使用其结果来校正原版载置台11在y方向上的位置的测量值(校正步骤)。
[0142]
即,在本实施方式所涉及的曝光装置100中,波长校正单元20根据波长跟踪器9的测量结果和基板载置台1的扫描移动中的频率f,校正基于干涉仪33的原版载置台11在y方向上的位置的测量结果。
[0143]
由此,能够高精度地校正用于测量原版载置台11在y方向上的位置的干涉仪33的测量值。
[0144]
此外,在本实施方式所涉及的曝光装置100中,使用低通滤波器从波长跟踪器9的测量值λw(t)分别提取预定的频率区域的分量λ
wlpf_high
(t)及λ
wlpf_low
(t),但不限于此。
[0145]
例如,也可以使用移动平均滤波器、带通滤波器或者高通滤波器等从波长跟踪器9的测量值λw(t)提取预定的频率区域的分量。
[0146]
[第二实施方式]
[0147]
图4示出第二实施方式所涉及的曝光装置200的部分放大示意性俯视图。
[0148]
如图4所示,在本实施方式所涉及的曝光装置200中,用于测量基板载置台1在y方向(第1方向)上的位置的反射镜2(第1反射面)配置于基板载置台1上。
[0149]
而且,位置测量用的测量光30(测长波束、第1测量光)在干涉仪3(第1测量部、第1干涉仪)与反射镜2之间传输。
[0150]
即,干涉仪3通过在朝向反射镜2输出测量光30之后对由反射镜2反射的测量光30进行接收,测量基板载置台1在y方向上的位置。
[0151]
接下来,从干涉仪3向光拾取器5射出通过使测量光30和未图示的参照光(第1参照光)相互干涉而得到的干涉光4。
[0152]
然后,光拾取器5在对干涉光4进行接收之后,经由光纤6将干涉光4输出给信号处理基板8。
[0153]
然后,信号处理基板8通过对输入的干涉光4进行光电变换,计算基板载置台1在y方向上的位置。
[0154]
另外,从用于检测预定的空间的折射率的波长跟踪器9输出的测量光经由光纤37输入到信号处理基板8。
[0155]
然后,信号处理基板8将由波长跟踪器9取得的预定的空间内的折射率的测量值经由线缆21传送给波长校正单元20。
[0156]
之后,波长校正单元20根据从信号处理基板8传送的折射率的值,实时地计算在预定的空间内传输的测量光30的波长的变化量。
[0157]
然后,波长校正单元20使用计算出的测量光30的波长的变化量,校正基板载置台1在y方向上的位置的测量结果。
[0158]
此时,由波长跟踪器9测量的测量光30的波长的时间变化λy(t)与第一实施方式所涉及的曝光装置100同样地,能够如以下的式(11)那样表示。
[0159]
λy(t)=λ
ylow
(t) λ
yhigh
(t)
···
(11)
[0160]
在此,λ
yhigh
(t)如以下的式(12)那样表示。
[0161][0162]
即,与在时刻t为t0至t1之间基板载置台1进行多次扫描移动相伴地,λ
yhigh
(t)能够通过以振幅m及频率f随时间变化的正弦函数表示。
[0163]
而且,λ
ylow
(t)是基于大气压的时间变化的分量,认为以比基板载置台1的扫描移动的频率f充分低的频率随时间变化。
[0164]
另外,在本实施方式所涉及的曝光装置200中,用于测量基板载置台1在x方向(第2方向)上的位置的反射镜12(第2反射面)也配置于基板载置台1上。
[0165]
而且,位置测量用的测量光31(测长波束、第2测量光)在干涉仪33(第2测量部、第2干涉仪)与反射镜12之间传输。
[0166]
即,干涉仪33通过在朝向反射镜12射出测量光31之后对由反射镜12反射的测量光
31进行接收,测量基板载置台1在x方向上的位置。
[0167]
接下来,从干涉仪33向光拾取器35射出通过使测量光31和未图示的参照光(第2参照光)相互干涉而得到的干涉光34。
[0168]
然后,光拾取器35在对干涉光34进行接收之后,经由光纤36将干涉光34输出给信号处理基板8。
[0169]
另外,波长跟踪器9(第3测量部)比反射镜12接近反射镜2地配置,通过测量在内部传输的测量光(第3测量光)的波长,能够计算来自干涉仪3的测量光30传输的空间的折射率。
[0170]
在以往的曝光装置中,原样地使用例如由设置于配置有干涉仪3的空间的波长跟踪器9计算出的折射率的值来校正干涉仪33的测量结果。
[0171]
然而,在如本实施方式所涉及的曝光装置200的扫描曝光装置中,基板载置台1在y方向上进行扫描移动,另一方面,在x方向上进行步进移动。
[0172]
即,在基板载置台1中,x方向上的步进移动和y方向上的扫描移动不相互连动,而是独立地进行。
[0173]
另外,在基板载置台1中,x方向上的步进移动时的速度及加速度和y方向上的扫描移动时的速度及加速度也相互不同。
[0174]
因此,y方向上的扫描移动时的测量光30传输的空间内的气压的变动和x方向上的步进移动时的测量光31传输的空间的气压的变动也相互不同。
[0175]
即,在将由设置于配置有干涉仪3的空间的波长跟踪器9测量的测量光的波长的时间变化原样地应用于来自干涉仪33的测量光31而进行校正时,测量误差与x方向上的位置相关地变大。
[0176]
另一方面,可以认为大气压的时间变化在测量光30传输的空间和测量光31传输的空间中相互相等。
[0177]
因此,在本实施方式所涉及的曝光装置200中,如以下的式(13)那样表示测量光31的波长的时间变化λ
x
(t),并且利用以下的式(14)所示的关系。
[0178]
λ
x
(t)=λ
xlow
(t)
···
(13)
[0179]
λ
xlow
(t)=λ
ylow
(t)
···
(14)
[0180]
然后,使用具有比频率f低的截止频率的低通滤波器,从测量光30的波长的时间变化λy(t)提取λ
ylpf_low
(t),并且根据
[0181]
λ
ylow
(t)=λ
ylpf_low
(t)
[0182]
的关系以及式(14),将λ
ylpf_low
(t)用作λ
xlow
(t)。
[0183]
如以上所述,在本实施方式所涉及的曝光装置200中,将由波长跟踪器9测量到的测量光的波长的时间变化输入给具有比频率f低的截止频率的低通滤波器。由此,取得由波长跟踪器9测量到的测量光的波长的时间变化中的预定的频率区域的分量。
[0184]
即,在本实施方式所涉及的曝光装置200中,从波长跟踪器9的测量值λy(t)提取与大气压的变动相伴的分量λ
ylow
(t)。
[0185]
然后,计算来自用于测量基板载置台1在x方向上的位置的干涉仪33的测量光31的波长的时间变化λ
x
(t),使用其结果来校正基板载置台1在x方向上的位置的测量值。
[0186]
即,在本实施方式所涉及的曝光装置200中,波长校正单元20根据波长跟踪器9的
测量结果和基板载置台1在y方向上的扫描移动的频率f,校正基于干涉仪33的基板载置台1在x方向上的位置的测量结果。
[0187]
由此,能够高精度地校正基板载置台1在x方向上的位置的测量值。
[0188]
此外,存在在波长跟踪器9的测量光的波长的时间变化中还包含与x方向上的步进移动时的测量光31传输的空间的气压的变动相应的分量的可能性。
[0189]
在该情况下,还能够通过将来自波长跟踪器9的输出输入给与步进移动的频率对应的带通滤波器并提取与x方向上的步进移动相伴的分量,校正基于干涉仪33的基板载置台1在x方向上的位置的测量值。
[0190]
另外,在本实施方式所涉及的曝光装置200中,根据波长跟踪器9的测量结果和基板载置台1在y方向上的扫描移动的频率f,校正基板载置台1在x方向上的位置的测量结果。
[0191]
然而,不限于此,也可以根据波长跟踪器9的测量结果和基板载置台1在y方向上的扫描移动的频率f来校正基板载置台1在z方向上的位置的测量结果。
[0192]
根据本发明,能够提供能够考虑载置台的移动而校正载置台的位置的测量结果从而提高曝光性能的曝光装置。
[0193]
[物品的制造方法]
[0194]
接下来,说明使用本实施方式所涉及的曝光装置的物品的制造方法。
[0195]
制造半导体ic元件、液晶显示元件以及mems等物品的方法包括使用本实施方式所涉及的曝光装置对涂敷有感光剂的晶圆、玻璃基板等基板进行曝光的工序。
[0196]
另外,上述方法包括对曝光后的基板(感光剂)进行显影的工序和对显影后的基板进行加工处理的其他公知的工序。
[0197]
此外,在此处所称的其他公知的工序中,包括蚀刻、感光剂剥离、切割、粘合以及封装等。
[0198]
根据本实施方式所涉及的物品的制造方法,能够制造比以往高质量的物品。
[0199]
以上,说明了优选的实施方式,但不限定于这些实施方式,能够在其要旨的范围内进行各种变形以及变更。
[0200]
虽然已经参考示例性实施例描述了本发明,但是应当理解,本发明不限于所公开的示例性实施例。所附权利要求书的范围被赋予最广泛的解释以涵盖所有此类修改以及等同的结构和功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。