1.本公开涉及介质供给装置以及使用该介质供给装置的介质处理装置。
背景技术:
2.在日本特开2016-653号公报(“用于实施发明的最佳方式”,图17)中设置有能够延长供纸托盘的托盘底板而搭载长形纸的方式,并公开了从供纸托盘的侧方喷射空气而使纸张悬浮,使悬浮的纸张吸附到搬送带而送出的方式。
技术实现要素:
3.本公开所要解决的技术课题是,在具备交接单元以及悬浮单元的介质供给装置中事先防止供给介质时的介质堵塞(卡纸)。
4.根据本公开的第1方案,提供一种介质供给装置,其具备:容纳单元,其容纳有单张介质;送出单元,其设置在所述容纳单元中容纳的所述介质的送出方向侧,一张一张送出所述介质;交接单元,其设置在所述容纳单元的上方,一张一张吸附所述容纳单元中容纳的介质,并交接给所述送出单元;悬浮单元,其设置在所述容纳单元中容纳的所述介质的与送出方向交叉的侧方,向所述介质的侧方喷射空气,使所述介质的上侧区域以分离的状态悬浮;以及位置检测单元,其在比所述容纳单元中容纳的所述介质的送出方向侧端部位置靠所述送出单元侧的位置,在到达所述送出单元的与所述介质接触的接触部之前为止的区域内,在所述介质的与送出方向交叉的宽度方向上隔着间隔而设置有多个,检测所述介质的送出方向侧端部的位置。
5.根据本公开的第2方案,提供一种介质供给装置,其具备:容纳单元,其容纳有单张介质;送出单元,其设置在所述容纳单元中容纳的所述介质的送出方向侧,一张一张送出所述介质;交接单元,其设置在所述容纳单元的上方,一张一张地吸附所述容纳单元中容纳的介质,并交接给所述送出单元;悬浮单元,其设置在所述容纳单元中容纳的所述介质的与送出方向交叉的侧方,向所述介质的侧方喷射空气,使所述介质的上侧区域以分离的状态悬浮;位置检测单元,其在比所述容纳单元中容纳的所述介质的送出方向侧端部位置靠所述送出单元侧的位置,在到达所述送出单元的与所述介质接触的接触部之前为止的区域内,在所述介质的与送出方向交叉的宽度方向上隔着间隔而设置有多个,检测所述介质的送出方向侧端部的位置;以及控制单元,其根据通过所述位置检测单元检测出的信息,判别所述介质的送出方向侧端部的状态是否在预先规定的容许范围内,在到了所述容许范围外的异常范围时,以停止所述介质的供给动作的方式进行控制。
6.根据本公开的第3方案,在所述各介质供给装置中,所述位置检测单元设置在比所述送出单元的与所述介质接触的接触部靠所述容纳单元中容纳的所述介质的送出方向侧端部的位置。
7.根据本公开的第4方案,在所述各介质供给装置中,所述容纳单元在所述送出单元侧具有挡壁,所述挡壁能够阻挡在未使用所述悬浮单元时被容纳的所述介质,所述位置检
测单元设置在比所述送出单元的与所述介质接触的接触部靠所述挡壁的位置。
8.根据本公开的第5方案,在所述各介质供给装置中,所述位置检测单元安装于被安装部,所述被安装部设置在所述送出单元的保持框架的一部分。
9.根据本公开的第6方案,在所述各介质供给装置中,所述位置检测单元配置在相对于所述介质的宽度方向比所述送出单元的与所述介质接触的接触部位置靠近外侧的位置。
10.根据本公开的第7方案,在根据所述第2方案的介质供给装置中,所述控制单元根据来自所述位置检测单元的信息而掌握所述介质的送出方向侧端部的斜行状态,判别所述斜行状态是否在所述容许范围内。
11.根据本公开的第8方案,在根据所述第7方案的介质供给装置中,所述控制单元将所述位置检测单元在预先规定的时间内未检测到所述介质的存在的情况也作为所述异常范围的一方式进行处理。
12.根据本公开的第9方案,在根据所述第2或第7方案的介质供给装置中,所述控制单元在判别所述介质的送出方向侧端部的状态在所述异常范围时,通知对用户进行警告的警告单元。
13.根据本公开的第10方案,在根据所述第2或第7方案的介质供给装置中,在随着所述介质的送出方向侧端部的状态处于所述异常范围内,在而所述介质的送出方向侧端部与所述送出单元呈非接触的状况下停止了所述介质的供给动作的情况下,所述控制单元在维持所述交接单元对所述介质的吸附动作的状态下,使所述介质返回到原来位置,停止所述交接单元的交接动作。
14.根据本公开的第11方案,在根据所述第2或第7方案的介质供给装置中,在随着所述介质的送出方向侧端部的状态处于所述异常范围内,在所述介质的送出方向侧端部与所述送出单元接触的状况下停止了所述介质的供给动作的情况下,所述控制单元在所述送出单元完成了送出所述介质的动作之后,使所述送出单元停止。
15.根据本公开的第12方案,提供一种介质处理装置,其具备:所述各介质供给装置;以及处理单元,其对从该介质供给装置供给的介质实施预先规定的处理。
16.(效果)
17.根据所述第1方案,在具备交接单元以及悬浮单元的介质供给装置中,能够事先防止供给介质时的介质堵塞(卡纸)。
18.根据所述第2方案,在具备交接单元以及悬浮单元的介质供给装置中,能够控制成事先防止供给介质时的介质堵塞(卡纸)。
19.根据所述第3方案,与设置在靠送出单元的与介质接触的接触部的位置的情况相比,能够在通过位置检测单元检测介质的送出状态之后,较长地确保到达送出单元的与介质接触的接触部为止的距离。
20.根据所述第4方案,能够容易以容纳单元的挡壁为基准设置位置检测单元。
21.根据所述第5方案,能够利用送出单元的保持框架容易地设置位置检测单元。
22.根据所述第6方案,能够避免与送出单元之间的干涉,并且能够在介质的宽度方向上以短间隔设置位置检测单元,早期检测供给介质时的介质的送出方向侧端部的状态。
23.根据所述第7方案,能够判别供给介质时的介质的斜行状态的良否,预先防止送出单元处的介质堵塞(卡纸)。
24.根据所述第8方案,能够判别供给介质时到达送出单元之前阶段的介质堵塞(卡纸)。
25.根据所述第9技术特征,能够向用户告知供给介质时的介质异常。
26.根据所述第10方案,在随着供给介质时的介质异常而停止介质的供给动作时,能够使异常状态的介质返回到容纳单元的原来位置。
27.根据所述第11方案,即使随着供给介质时的介质异常而达到介质与送出单元接触的状况,也能够消除介质与送出单元的接触状态。
28.根据所述第12方案,能够构建包括介质供给装置的介质处理装置,在具备交接单元以及悬浮单元的所述介质供给装置中,能够事先防止供给介质时的介质堵塞(卡纸)。
附图说明
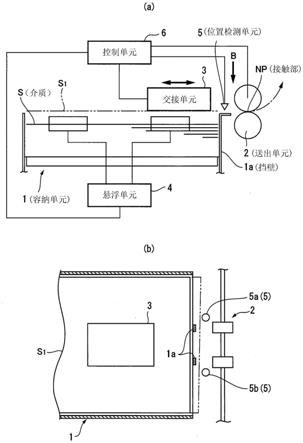
29.图1的(a)是示出适用本公开的介质供给装置的实施方式的概要的说明图,图1的(b)是从b方向观察图1的(a)所示的介质供给装置的向视说明图。
30.图2是示出实施方式1所涉及的介质处理装置的整体结构的说明图。
31.图3是示出使用于实施方式1所涉及的介质处理装置的介质供给装置的一例的说明图。
32.图4是示出实施方式1所涉及的介质供给装置的控制系统的说明图。
33.图5是示出实施方式1所涉及的介质供给装置的介质容纳部的结构例的立体说明图。
34.图6是示出作为实施方式1所涉及的交接单元的真空头的细节的说明图。
35.图7是从图6中vii方向观察到的真空头的向视说明图。
36.图8是示出图4所示的空气分开机构的结构例的说明图。
37.图9的(a)是示出图4所示的真空头的吸引机构的结构例的说明图,图9的(b)是示出图4所示的悬浮机构的结构例的说明图,图9的(c)是示出图4所示的空气分开机构的空气供给系统的一例的说明图。
38.图10的(a)是示出图4所示的升降机构的结构例的说明图,图10的(b)是示出图10的(a)所示的升降机构的主要部分的立体说明图。
39.图11是示出实施方式1中使用的真空头以及送出辊周围的结构例的说明图。
40.图12是从图11中xii方向观察到的图11的结构例的向视说明图。
41.图13是示出位置传感器的安装部周边的结构例的说明图。
42.图14是示出用于安装位置传感器的滑槽的结构例的说明图。
43.图15是示出位置传感器在介质的送出方向上的设置部位的说明图。
44.图16是示出位置传感器在送出辊的轴向上的设置部位的说明图。
45.图17的(a)是示出从介质容纳部供给的介质大致笔直地送出的情况的说明图,图17的(b)是示出从介质容纳部供给的介质被挡壁阻挡的情况的说明图,图17的(c)是示出成为从介质容纳部供给的介质的送出方向左侧先行的斜行状态的情况的说明图,图17的(d)是示出成为从介质容纳部供给的介质的送出方向右侧先行的斜行状态的情况的说明图。
46.图18是示出实施方式1中使用的介质供给控制的流程图。
47.图19的(a)是示出容纳在介质容纳部中的介质的初始位置的说明图,图19的(b)是
示出从介质容纳部供给的介质被介质容纳部的挡壁卡纸的情况的说明图,图19的(c)是示出从介质容纳部供给的介质以斜行状态朝向送出辊的情况的说明图,图19的(d)是示出从介质容纳部供给的介质的送出方向侧端部以斜行状态通过送出辊的咬合区域的情况的说明图。
48.图20是示出实施方式2所涉及的介质供给装置的外观的立体说明图。
49.图21是从正面侧观察图20所示的介质供给装置的内部结构的主要部分的主要部分说明图。
50.图22是示出图21中的长形介质的容纳部的主要部分的说明图。
具体实施方式
51.◎
实施方式的概要
52.图1的(a)、(b)是示出适用本公开的介质供给装置的实施方式的概要的说明图。
53.图1的(a)、(b)所示的介质供给装置一张一张地供给单张介质s,除了单独使用的情况之外,例如还与对所供给的介质s实施预先规定的处理的处理单元(图1中未图示)组合使用来实现介质处理装置。作为在此所说的处理单元,包括在介质上形成图像的图像形成单元以及在介质上涂布的涂布单元等任意单元。
54.在本例中,如图1的(a)、(b)所示,介质供给装置具备:容纳单元1,其容纳有单张介质s;送出单元2,其设置在容纳单元1中容纳的介质s的送出方向侧,一张一张地送出介质s;交接单元3,其设置在容纳单元1的上方,一张一张地吸附容纳单元1中容纳的介质s,并交接给送出单元2;悬浮单元4,其设置在容纳单元1中容纳的介质s的与送出方向交叉的侧方,向介质s的侧方喷射空气,使介质s的上侧区域以分离的状态悬浮;以及位置检测单元5,其在比容纳单元1中容纳的介质s的送出方向侧端部位置靠送出单元2侧的位置,在到达送出单元2的与介质s接触的接触部np之前为止的区域内,在介质s的与送出方向交叉的宽度方向上隔着间隔而设置有多个,检测介质s的送出方向侧端部的位置。
55.尤其,介质供给装置典型地为还具备控制单元6的方式,所述控制单元6根据通过位置检测单元5检测出的信息判别介质s1的送出方向侧端部的状态是否在预先规定的容许范围内,在到了容许范围外的异常范围时以停止介质s1的供给动作的方式进行控制。
56.在这样的技术方案中,容纳单元1在通常具有装载介质s的装载部并且容纳各种尺寸的介质s的方式中采用具有以下两个单元的方式,该两个单元分别是:侧方引导部,其在介质s的与送出方向交叉的侧方定位引导介质s;以及后方引导部,其在介质s的位于与送出方向相反的一侧的后方定位引导介质s。并且,从能够进行介质s的补充等的观点考虑,容纳单元1大多构成为能够相对于介质供给装置壳体拉出,但是本例能够抑制介质s以卡在送出单元2的状态堵塞,因此不会阻碍容纳单元1的拉出操作。
57.并且,作为送出单元2,广泛包括具有送出介质s的功能的送出单元,但是例如典型地为对结构的送出辊或者送出辊和送出带的组合等,在该情况下,“与介质s1接触的接触部np”是指夹持作为送出对象的介质s1的送出单元之间的咬合区域。例如,若送出单元2为辊对,则为辊对所接触的区域(咬合区域)。并且,也可以是一个辊进行带的搬送且由辊对来夹住带的方式。
58.并且,本例的前提是搭载有交接单元3和悬浮单元4,广泛包括大容量介质类型、长
形纸适用类型等。无论是哪一种类型,均在能够拉出容纳单元1的方式中尤其有效。
59.而且,位置检测单元5只要在介质s的与送出方向交叉的宽度方向上隔着间隔而设置有多个,则可以适当地选定。在此,作为位置检测单元5,以介质s的送出方向端部的斜行状态为主进行掌握,因此基本设置两个(5a、5b)即可,但是当然也可以设置三个以上。另外,关于在介质s的宽度方向上连续延伸的图像传感器,若考虑与交接单元3之间的干涉,则作为位置检测单元5是不优选的。
60.接着,对本实施方式的典型方式或者优选方式进行说明。
61.首先,作为位置检测单元5的优选方式,可以列举设置在比送出单元2的与介质接触的接触部np靠容纳单元1中容纳的介质s的送出方向侧端部的位置的方式。本例在由位置检测单元5检测到介质的送出方向侧端部的状态时,检测出的介质至送出单元2的与介质接触的接触部为止的距离长,因此在检测介质的送出状态时,能够有效地避免介质到达送出单元的接触部的状况。
62.在本方式中,作为进一步优选的方式,可以列举如下方式:容纳单元1在送出单元2侧具有挡壁1a,所述挡壁1a能够阻挡在未使用悬浮单元时被容纳的介质s,位置检测单元5设置在相对于挡壁1a靠送出单元2的与介质s1接触的接触部np的位置。在本例中,能够以挡壁1a为基准选定位置检测单元5的设置部位。
63.并且,作为位置检测单元5的其他优选方式,可以列举安装于在送出单元2的保持框架的一部分设置的被安装部的方式。本例在将位置检测单元5设置在靠送出单元2的位置时,利用送出单元2的保持框架简化了位置检测单元5的安装结构。
64.而且,作为位置检测单元5的优选方式,可以列举配置在相对于介质s1的宽度方向比送出单元2的与介质s1接触的接触部np位置靠近外侧的位置的方式。本例在相对于介质s1的宽度方向隔着间隔而设置位置检测单元5时,由于存在与交接单元3之间发生干涉的担忧,因此很难设置在相对于介质s1的宽度方向比送出单元2的与介质s1接触的接触部np位置靠内侧的位置,只要从尽可能缩小宽度方向上的间隔的观点考虑,则为优选的设置例。
65.并且,作为控制单元6的典型方式,可以列举根据来自位置检测单元5的信息而掌握介质s1的送出方向侧端部的斜行状态并判别斜行状态是否在容许范围内的方式。在本例中,在作为送出对象的介质s1的斜行状态大的情况下,例如在通过处理单元对所供给的介质s1实施规定的处理时,存在损坏对介质s1的准确区域的处理的担忧,谋求事先避免这样的状况。另外,关于与介质s1的斜行状态有关的容许范围、异常范围,可以考虑基于处理单元的处理品质而按照每个机种适当地选定。
66.在本例中,作为控制单元6的优选方式,可以列举将位置检测单元5在预先规定的时间内未检测到介质s1的存在的情况也作为异常范围的一方式进行处理的方式。本例设想了介质s1卡在容纳单元1的挡壁1a等的状况。
67.而且,作为控制单元6的其他优选方式,可以列举在判别介质s1的送出方向侧端部的状态在异常范围内时通知对用户进行警告的警告单元的方式。用户收到该警告,能够确认从容纳单元1供给的介质s1的异常。
68.并且,作为控制单元6的其他优选方式,可以列举如下方式:在随着介质s1的送出方向侧的端部的状态处于异常范围内,在介质s1的送出方向侧端部与送出单元2非接触的状况下停止了介质s1的供给动作的情况下,在维持交接单元3对介质s1的吸附动作的状态
下,使介质s1返回到原来位置,停止交接单元3的交接动作。在本例中,在即使为介质s1的供给发生异常时介质s1也不到达送出单元2的与介质s1接触的接触部np位置的状况下停止了介质s1的供给动作的情况下,使异常的介质s1返回到容纳单元1的原来位置,因此在避免异常的介质s1直接残留的方面有效。
69.而且,作为控制单元6的其他优选方式,可以列举如下方式:在随着介质s1的送出方向侧的端部的状态处于异常范围内,在介质s1的送出方向侧端部与送出单元2接触的状况下停止了介质s1的供给动作的情况下,在送出单元2完成了送出介质的动作之后,停止送出单元2。在本例中,只要利用设置在送出单元2的下游侧紧后方的图示外的其他位置检测单元来判别介质s1是否处于与送出单元接触的状态即可。本例设想了虽然判别介质s1为异常但是介质s1的送出方向侧端部已经通过了送出单元2的状况,但是若直接停止介质s1的供给动作,则导致介质s1在与送出单元2接触的状态下残留,因此通过送出单元2以介质s1相对于送出单元2不存在卡止的方式完成介质s1的送出动作。
70.以下,根据附图所示的实施方式对本公开进行更详细的说明。
71.◎
实施方式1
72.图2示出实施方式1所涉及的介质处理装置的整体结构。
73.―介质处理装置的整体结构―
74.在图2中,介质处理装置10具备:介质供给装置11,其一张一张地供给单张介质;以及作为处理单元的处理单元20,其对从介质供给装置11供给的介质实施预先规定的处理。
75.在本例中,处理单元20具备相对于介质形成图像的图像生成部21,图像生成部21例如使用采用了电子照片方式、喷墨记录方式等各种图像生成方式的图像生成部。而且,在处理单元20内设置有:将从介质供给装置11供给的介质搬入到图像生成部21的搬入搬送路径22;以及将在图像生成部21中生成图像的介质搬出到处理单元20外的搬出搬送路径23,而且在本例中,在处理单元20内的图像生成部21的下方另外设置有内置的介质供给部24,来自介质供给部24的介质也经由供给搬送路径25而供给到图像生成部21。另外,符号26是设置在搬入搬送路径22的入口的搬入辊26,在搬入搬送路径22、搬出搬送路径23以及供给搬送路径25设置有适当数量的搬送单元。
76.―介质供给装置的整体结构―
77.在本例中,如图2以及图3所示,介质供给装置11具有容纳介质的壳体12,在该壳体12以可拉出的方式配设有两级结构的拉出型上级抽盒13和下级抽盒14,并且在壳体12的上部配设有能够手动供给介质的手动供给部15。而且,在壳体12的处理单元20侧配设有将从上级抽盒13、下级抽盒14以及手动供给部15供给的介质转接到处理单元20侧并搬出的转接单元16。
78.在本例中,上级抽盒13以及下级抽盒14均具备容纳大容量介质并一张一张供给的结构。并且,转接单元16具有搬出从上级抽盒13供给的介质的第1搬出路径17a、搬出从下级抽盒14供给的介质的第2搬出路径17b以及搬出从手动供给部15供给的介质的第3搬出路径17c,在这些第1~第3搬出路径17a~17c上设置有适当数量的搬送辊18,并且在第1~第3搬出路径17a~17c的出口侧形成有与朝向处理单元20的排出口17e相连的合流搬送路径17d,在该合流搬送路径17d设置有排出辊19。另外,在上级抽盒13、下级抽盒14分别设置有把手13a、14a,能够向紧前侧拉出。
79.―上级抽盒(下级抽盒)的结构例―
80.在本例中,上级抽盒13以及下级抽盒14大致相同地构成,以下以上级抽盒13为例进行说明。
81.在本例中,例如如图4所示,上级抽盒13具备:作为容纳单元的容纳部30,其容纳有单张介质;作为送出单元的送出辊40,其设置在容纳部30中容纳的介质的送出方向侧,一张一张地送出介质;作为交接单元的真空头50,其设置在容纳部30的上方,一张一张地吸附容纳部30中容纳的介质,并交接给送出辊40;作为悬浮单元的悬浮机构70,其设置在容纳部30中容纳的介质的与送出方向交叉的侧方,向介质的侧方喷射空气,使介质的上侧区域以分离的状态悬浮;以及空气分开机构80,其设置在容纳部30中容纳的介质的送出方向侧,在通过悬浮机构70悬浮的上侧的介质与位于其下方侧的介质之间喷射空气,将悬浮的介质分开。
82.<容纳部>
83.在本例中,如图4以及图5所示,容纳部30具有装载各种尺寸的介质的装载底板31,具备:作为侧方引导单元的侧导向件32(具体而言为32a、32b),其设置在该装载底板31上装载的各种尺寸的介质的与送出方向交叉的宽度方向的侧方,定位介质的侧方位置而引导;作为后方引导单元的端部导向件33,其设置在装载底板31上装载的介质的与送出方向相反的一侧的后侧方,定位介质的后方位置而引导;以及分隔板34,其对装载于装载底板31的介质的送出方向侧位置进行分隔。
84.在本例中,只要与作为使用对象的介质的尺寸一致地设计容纳部30即可,但是从具有通用性的观点来看,优选以通常尺寸的介质为主设定使用对象。作为此处所说的通常尺寸的介质,例如使用长度方向的长度达到488mm的介质,作为这样的尺寸的介质的一例,相当于jis标准的a3版尺寸以下的介质。
85.而且,在本例中,侧导向件32设置成能够沿着装载底板31的宽度方向移动,定位在预先规定的定位位置,并且,端部导向件33设置成沿着装载底板31的介质的送出方向移动,定位在预先规定的定位位置。并且,在本例中,在分隔板34设置有从该分隔板34的上缘朝向上方突出的多个(本例中为两个)挡片35(参照图8),挡片35作为阻挡在未使用悬浮机构70时的介质组的上方区域的挡壁36发挥功能。
86.而且,如图4所示,装载底板31被后述的升降机构90(参照图10)支承为能够升降。
87.<送出辊>
88.在本例中,如图4、图8以及图11所示,送出辊40具备:驱动辊41,其在驱动旋转的驱动轴41a具有多个分割辊体41b、41c;以及从动辊42,其跟随驱动辊41的旋转而从动旋转,在旋转轴42a具有多个分割辊体42b、42c,在驱动辊41与从动辊42之间的接触部np(具体而言,相当于分割辊体41b、42b、41c、42c之间的咬合区域)夹持介质而进行搬送。
89.另外,将汇总分割辊体41b、42b而指代的情况称作“分割辊43”,将汇总分割辊体41c、42c而指代的情况称作“分割辊44”。
90.<真空头>
91.在本例中,如图6、图7以及图9的(a)所示,真空头50借助引导机构58(例如使用引导杆)而被头框架60支承,并设置成能够沿着介质的送出方向进退移动,所述头框架60在容纳部30的上方固定于壳体12。
92.在本例中,真空头50具有中空箱状的头主体51,在头主体51中的与容纳于容纳部30中的介质相对的面开设有多个真空孔52,在头主体51连接有吸引机构53。在此,采用了如下吸引机构53:通过真空导管55连接吸引用的吹送器54与头主体51之间,在真空导管55的中途设置有打开或切断流路的真空阀56,通过阀马达57打开或关闭真空阀56。
93.而且,在头框架60设置有使真空头50进退移动的进退机构61。在本例中,如图6以及图7所示,进退机构61在头框架60固定有步进马达62,在该步进马达62连接有驱动带轮63,而且在头框架60的适当部位设置有适当数量的传递带轮64,在驱动带轮63以及传递带轮64架设有丝材65,并且将丝材65的一部分紧贴于真空头50。在本例中,驱动带轮63随着步进马达62的正反旋转而旋转,丝材65随之移动规定量,真空头50在介质的送出方向上进退移动。
94.<悬浮机构>
95.在本例中,如图4、图5以及图9的(b)所示,悬浮机构70例如将侧导向件32(32a、32b)构成为中空箱状,在侧导向件32的面向介质的侧方的部位的上方开设有多个空气吹出口71,在侧导向件32的中空部配设有一端与空气吹出口71连通的空气导管72,使空气导管72的另一端与吹出用的吹送器73连通。另外,吹送器73可以内置设置在侧导向件32,也可以相对于侧导向件32外置设置。
96.而且,在本例中,在侧导向件32的空气吹出口71的附近设置有介质限制单元100。本例的介质限制单元100设置在装载底板31上装载的介质的侧方,突出到介质的容纳区域,起到限制在使用悬浮机构70时悬浮的介质过于上浮的作用。
97.<空气分开机构>
98.在本例中,如图4、图8以及图9的(c)所示,空气分开机构80具有空气喷嘴81,所述空气喷嘴81朝着通过悬浮机构70悬浮的介质的送出方向侧端部,从下方朝斜后方喷射刀状的空气,通过空气引导板82转换从空气喷嘴81吹出的空气的方向,在通过悬浮机构70悬浮的上侧的介质与位于其下方侧的介质之间喷射空气,将悬浮的介质分开。
99.而且,在本例中,空气喷嘴81与空气导管83连通,在该空气导管83连接有空气吹出用的吹送器84。而且,在空气导管83的中途设置有打开或切断流路的开闭阀85,通过阀马达86打开或关闭该开闭阀85。
100.<升降机构>
101.如图4以及图10的(a)、图10的(b)所示,升降机构90在装载底板31中的与介质的送出方向交叉的宽度方向两侧的四个部位具备悬挂部91,在各个悬挂部91具备末端各自分开并连接的四根丝材92~95,在将各丝材92~95架设在一个或者多个引导带轮96上之后,将各丝材92~95的一端侧紧贴于同轴连接的卷绕带轮97(本例中为97a、97b),并且通过可正反旋转的驱动马达98使卷绕带轮97旋转,使各丝材92~95移动规定量,由此使装载底板31保持平行姿势的同时升降。另外,符号99表示用于将装载于装载底板31的介质中的介质的表面设定在预先规定的高度位置处的高度传感器。
102.―位置传感器―
103.而且,在本实施方式中,如图4以及图11所示,在隔着送出辊40而介质的送出方向上游侧设置有前级位置传感器120(相当于图1所示的位置检测单元5),在介质的搬送方向下游侧设置有后级位置传感器130。
104.例如如图16所示,前级位置传感器120将朝向所送出的介质照射光的发光元件121和接收来自介质的反射光的受光元件122并列设置在传感器壳体123内,因此能够在受光元件122的受光时刻检测到介质的送出方向侧端部通过了前级位置传感器120。另外,后级位置传感器130也具有与前级位置传感器120大致相同的结构。
105.<前级位置传感器的布局>
106.在本例中,如图4、图11至图16所示,前级位置传感器120在比容纳部30中容纳的介质的送出方向侧端部位置靠送出辊40侧的位置并且到达送出辊40的咬合区域(与介质接触的接触部)np之前为止的区域r设置有多个(本例中为两个)。
107.而且,前级位置传感器120(具体而言为120a、120b)在介质的与送出方向交叉的宽度方向、换句话说送出辊40的轴向上隔着间隔g而设置,检测介质的送出方向侧端部的位置。
108.尤其,作为前级位置传感器120的优选布局,如图11以及图15所示,优选设置在比送出辊40的咬合区域np靠容纳部30中容纳的介质的送出方向侧端部的位置。
109.在此,容纳于容纳部30中的介质的送出方向侧端部被设置在容纳部30的分隔板34的挡片35的挡壁36阻挡,因此能够以挡壁36为基准选定前级位置传感器120的设置位置。
110.在该情况下,若设挡壁36与前级位置传感器120的检测面(具体而言为受光元件122的检测面)的中心位置之间的距离为m1,设送出辊40的咬合区域np的中心位置与前级位置传感器120的检测面的中心位置之间的距离为m2,则以满足m1<m2的关系的方式选定即可。
111.但是,在将m1设定得过短的情况下,发生容纳在容纳部30中的介质的末端位置即使从挡壁36稍微冲入送出方向侧也会通过前级位置传感器120的状况,存在成为错误检测的因素的担忧。
112.因此,在本例中,如图15所示,所述挡片35在其末端部具有朝向介质的送出方向弯折的弯折突片37,将挡片35与弯折突片37的边界部形成为预先规定的曲率半径r的弯曲部38。在本例中,弯折突片37具有在送出介质时引导介质的功能,并且,当弯曲部38假设为非弯曲部时,在送出介质时容易卡住,因此为了避免该现象而形成。
113.在本例中,以成为比挡片35的弯曲部38的末端位置e靠送出辊40侧的区域(相当于图15中右侧的区域)的方式选定m1。其依据是,容纳在容纳部30中的介质不会在初始位置爬升至弯曲部38的末端位置e。
114.并且,关于前级位置传感器120(120a、120b)的沿送出辊40的轴向的距离l,可以适当地选定,但是从也适用于尺寸小的介质的观点考虑,优选将两者之间的距离l设定得尽可能短。
115.在本例中,如图16所示,从送出最小尺寸的介质的观点考虑,最小尺寸的介质的宽度尺寸wmin比送出辊40的分割辊43(相当于分割辊体41b、42b)与分割辊44(相当于分割辊体41c、42c)之间的间隙尺寸wg大,需要在送出辊40的分割辊43、44的咬合区域np夹持最小尺寸的介质的宽度方向侧部。
116.尤其在本例中,真空头50得到吸附所悬浮的介质s1而交接给送出辊40的功能,因此真空头50将介质交接给送出辊40之后,不得不靠近至送出辊40的咬合区域np的附近。因此,要求真空头50的进退移动范围在送出辊40的分割辊43、44的间隔尺寸wg内靠近送出辊
40的咬合区域np。
117.因此,前级位置传感器120(120a、120b)在面向送出辊40的分割辊43、44的间隙尺寸wg的容纳部30侧的区域与真空头50的进退移动范围发生干涉,因此无法设置。并且,分割辊43、44的存在相对于面向送出辊40的分割辊43、44的容纳部30侧的区域形成干扰,因此很难设置前级位置传感器120(120a、120b)。
118.因此,在本实施方式中,前级位置传感器120(120a、120b)设置于在送出辊40的轴向上靠近送出辊40的分割辊43、44的外侧的位置。因此,在本例中,前级位置传感器120(120a、120b)能够检测除了最小尺寸的介质以外的尺寸的介质的送出方向侧端部的状态。
119.另外,在本例中,以咬合最小尺寸的介质的侧部的方式选定送出辊40的分割辊43、44的间隙尺寸wg,但是只要能够以咬合最小尺寸的介质的宽度方向内侧的方式选定,则能够以关于最小尺寸的介质也能够进行检测的方式设置前级位置传感器120。
120.<前级位置传感器的安装结构>
121.在本例中,如图11至图16所示,前级位置传感器120安装于被安装部46,所述被安装部46设置在保持送出辊40的驱动辊41的保持框架45的一部分。
122.而且,保持框架45具有截面为大致l字状的长形框架主体45a,框架主体45a的竖立部分固定于真空头50的头框架60,并且在框架主体45a的水平部分的长度方向大致中央设置有大致矩形状的缺口45b,并且该水平部分在远离竖立部分的一侧设置有朝向斜上方倾斜的锥形部45c。在此,缺口45b是用于使驱动辊41的分割辊体41b、41c比水平部分向下方露出的开口,锥形部45c作为用于将悬浮的介质的送出方向侧端部引导到送出辊40的咬合区域np的引导滑槽发挥功能。
123.在本例中,被安装部46设置在保持框架45的水平部分的缺口45b的长度方向两侧,通过固定件将截面为大致l字状的传感器托架47固接于在保持框架45的水平部分的末端形成的折回部45d,将传感器托架47配置成与保持框架45的水平部分大致平行并且从折回部45d呈檐状突出,在与传感器托架47相对的水平部分开设有通孔48。
124.而且,在传感器托架47定位固定有前级位置传感器120的传感器壳体123,由发光元件121以及受光元件122构成的检测面与通孔48对应配置。
[0125]-后级位置传感器-[0126]
在本例中,后级位置传感器130检测通过了送出辊40的咬合区域np的介质s是否通过,在最小尺寸的介质所通过的区域内的送出辊40的咬合区域np的附近设置有一个后级位置传感器130。
[0127]
在本例中,如图11、图14以及图16所示,后级位置传感器130安装于被安装部135,所述被安装部135设置在送出辊40的保持框架45中的水平部分的缺口45b的靠竖立部分的位置。
[0128]
在本例中,被安装部135一体地形成有传感器托架136,所述传感器托架136将保持框架45的面向缺口45b的竖立部分的一部分向大致水平方向弯折而成,在该传感器托架136的下表面固定有后级位置传感器130的传感器壳体133,使由发光元件131以及受光元件132构成的检测面朝向介质所通过的区域相对配置。
[0129]
―控制系统―
[0130]
在本例中,如图4所示,设置有对介质供给装置11进行控制的控制装置200。该控制
装置200由例如具有cpu、rom、ram以及i/o端口等的微型计算机构成,使cpu获取随着作业指定等而产生的各种信息或来自位置传感器(例如前级位置传感器120、后级位置传感器130)的信号,按照预先安装于rom的程序进行运算,将规定的控制信号送出到各控制对象。
[0131]
在本例中,作为控制对象,可以列举送出辊40、真空头50(吸引机构53、进退机构61)、悬浮机构70、空气分开机构80以及升降机构90等,并且在控制装置200设置有显示介质的供给作业的进行状态或介质的供给状态的异常警告等的显示器210。
[0132]
―通过介质供给装置供给介质的动作―
[0133]
在本实施方式中,若向控制装置200输入介质的供给作业指示,则控制装置200在确认容纳部30内的介质s的表面设置在预先规定的位置之后,执行一连串介质供给动作。
[0134]
通常,悬浮机构70使介质s的上侧区域悬浮,真空头50随之吸附所悬浮的介质,从原始位置向送出辊40侧进出移动,使介质交接到送出辊40。在交接该介质时,空气分开机构80工作,在悬浮的上侧的介质s1与位于比介质s1靠下方的位置的第二张以后的介质s之间喷射刀状的空气,将悬浮的介质进行分离。
[0135]
然后,到达送出辊40的咬合区域np的介质s1通过送出辊40的驱动旋转而被依次送出。
[0136]
另外,只完成介质的交接的真空头50在返回到原来位置(原始位置)之后,准备进行下一个处理。并且,空气分开机构80也在介质的分开动作结束的时刻停止空气的喷射,准备进行下一个处理。
[0137]
―通过前级位置传感器进行检测的动作例―
[0138]
在本例中,前级位置传感器120(120a、120b)检测从容纳部30供给的介质s的送出方向侧端部是否通过,并将检测结果附加给控制装置200,由此控制装置200能够掌握介质s的送出方向侧端部的状态,判别是容许范围内还是容许范围外的异常范围。
[0139]
(1)正常供给介质的情况
[0140]
如图17的(a)所示,在开始通过真空头50使介质s1移动之后在大致相同的时刻通过介质s1的前级位置传感器120(120a、120b),因此前级位置传感器120(120a、120b)两者的时间差δt=|t1-t2|无限接近0,不会达到预先规定的阈值。
[0141]
(2)介质的异常供给例
[0142]
在本例中,如图17的(b)所示,悬浮的介质s1卡在容纳部30的挡片35,介质s的送出方向侧端部的整个区域或者单侧区域不从容纳部30向送出方向移动。在该情况下,即使真空头50开始从原始位置移动而经过预先规定的时间tc,前级位置传感器120(120a、120b)也无法检测介质s1的送出方向侧端部的整个区域或者单侧区域通过。因此,在前级位置传感器120(120a、120b)双方或者一方即使经过规定的时间tc也不接通的情况下,能够判断为介质的导出动作发生了异常。
[0143]
(3)介质的斜行供给例
[0144]
在本例中,如图17的(c)或者图17的(d)所示,悬浮的介质s1通过真空头50移动到送出辊40侧,但是为以相对于真空头50斜行的状态被吸附的状况。此时,在介质s1的宽度方向左侧区域先行送出的情况下,如图17的(c)所示,介质s1的送出方向侧端部优先通过一个前级位置传感器120a,之后起通过另一前级位置传感器120b。相反地,在介质s1的宽度方向右侧区域先行送出的情况下,如图17的(d)所示,介质s1的送出方向侧端部优先通过一个前
级位置传感器120b,之后起通过另一前级位置传感器120a。因此,虽然两者的时间差δt=|t1-t2|反映了斜行状况,但是设想介质的斜行状态极大到不损害介质搬送到处理单元20的搬送性或通过处理单元20处理介质的处理性能的程度的情况而预先选定阈值c,若为阈值c以内,则能够判别为容许范围,若超过阈值c,则能够判别为异常范围。
[0145]
―介质供给控制―
[0146]
图18是示出通过介质供给装置11控制介质供给的一例的流程图。
[0147]
首先,若输入一张或者多张(n张)介质的供给作业指示,则首先开始第一张介质的供给动作。
[0148]
此时,首先,前级位置传感器120(120a、120b;图18中用sr1、sr2标记)检查在预先规定的时间tc内是否接通,在均接通的情况下,运算两者的时间差δt=|t1-t2|。相反地,在sr1或者sr2中的任一个未接通的情况下,判断为介质的导出动作有异常,停止介质的供给动作。
[0149]
并且,在运算两者的时间差δt之后,检查δt>阈值c。
[0150]
在此,在δt为阈值c以下的情况下,判别介质的斜行状态为正常(容许范围内),继续执行介质的供给动作,继续进行每一张介质的供给动作,直至结束介质的供给作业。
[0151]
另一方面,在满足δt>阈值c的情况下,判别为介质的斜行量(具体而言为介质的送出方向侧端部的斜行量)有异常,停止介质的供给动作。
[0152]
此时,检查介质是否通过送出辊40的咬合区域np,在介质没有到达送出辊40的咬合区域np的情况下,使真空头50后退到原始位置之后,停止真空头50的吸引动作。并且,在介质通过了送出辊40的咬合区域np的情况下,在完成送出辊40的送出动作之后,停止驱动送出辊。
[0153]
在此,在停止介质的供给动作的情况下,可以在图4所示的显示器210上显示异常警告。这样一来,用户能够尽快掌握介质的供给动作有异常。
[0154]
―基于介质供给控制的动作例―
[0155]
图19的(a)是示出悬浮的介质s1的供给动作开始的状态的示意图。
[0156]
在图19中,真空头50例如能够通过原始位置传感器140判别是否位于原始位置。因此,能够观察原始位置传感器140的变化时刻来掌握真空头50开始从原始位置移动。
[0157]
图19的(b)示出悬浮的介质s1的送出方向侧端部卡在容纳部30的挡片35的状况。在该情况下,在真空头50开始进出移动之后,即使达到预先规定的时间tc,介质s1也不通过前级位置传感器120(120a、120b),前级位置传感器120也不接通。在该情况下,控制装置200使真空头50后退至原始位置,使介质s1返回到原来位置之后,停止介质s的供给动作。
[0158]
图19的(c)示出在开始所悬浮的介质s1的供给动作并通过前级位置传感器120(120a、120b)之后判别为介质s1的斜行量有异常、但是介质s1没有到达送出辊40的咬合区域np的状况。在该情况下,控制装置200在使真空头50后退至原始位置,并使介质s1返回到原来位置之后,停止介质s的供给动作。
[0159]
图19的(d)示出在开始所悬浮的介质s1的供给动作并通过前级位置传感器120(120a、120b)之后判别为介质s1的斜行量有异常、但是介质s1通过了送出辊40的咬合区域np的状况。在此,本例中能够根据介质s1是否通过后级位置传感器130来判别介质s1是否通过送出辊40的咬合区域np。后级位置传感器130与送出辊40的咬合区域np分离某程度的距
离m3,但是在介质s1的送出方向侧端部刚刚冲入送出辊40的咬合区域np之后想要停止通过送出辊40供给介质的动作的情况下,送出辊40的图示外的驱动马达惯性旋转,因此到达送出辊40的咬合区域np的介质s1大多惯性移动至后级位置传感器130的位置。
[0160]
在该情况下,控制装置200在完成送出辊40的送出动作之后,使送出辊40停止。由此,能够在介质s1不残留于送出辊40的咬合区域np的前提下,拉出介质的供给发生了异常的例如上级抽盒13。
[0161]
◎
实施方式2
[0162]
图20示出实施方式2所涉及的介质供给装置11的主要部分。
[0163]
在图20中,介质供给装置11的基本结构与实施方式1大致相同,但是与实施方式1不同,除了通常尺寸的介质之外,还能够将长度方向的长度比通常尺寸长的长形介质作为使用对象。另外,对与实施方式1相同的结构标注与实施方式1相同的符号,在此省略其详细说明。
[0164]
在本例中,介质供给装置11具有装载并供给通常尺寸的介质的主体部300(与实施方式1的介质供给装置大致相同的结构),能够在该主体部300附加长形选项400而装载并供给长形介质。
[0165]
在本例中,主体部300具有与实施方式1所示的介质供给装置11大致相同的结构,但是与实施方式1不同,构成为能够在壳体12的位于与转接单元16相反的一侧的侧壁确保可连接长形选项400的开口部,并且在壳体的12的上部中的与手动供给部15相邻的部位设置有开闭罩301,所述开闭罩301能够以手动供给部15侧为旋转支点打开或关闭,通过操作在开闭罩301设置的手柄302而打开开闭罩301,确保设置长形介质时的作业空间。
[0166]
在本例中,如图20至图22所示,长形选项400具备:追加装置401,其连接于主体部300的与转接单元16相反的一侧的侧壁的开口部;以及变更装置,其变更主体部300侧的结构的一部分。
[0167]
在本例中,变更装置在主体部300中的构成上级抽盒13的容纳部30的一部分的装载底板31设置有作为用于加高高度的加高部的加高台421,将该加高台421的表面部作为专用装载部422。
[0168]
并且,追加装置401在外置壳体402内的相邻于专用装载部422的与送出辊40相反的一侧的部位设置有追加装载部403,专用装载部422的装载面和追加装载部403的装载面呈大致同一水平面而作为可装载长形介质的长形装载部410发挥功能。在本例中,尤其采用了使用加高台421而与通常尺寸的介质的装载面相比加高长形介质的装载面的结构,其意图是减少装载于长形装载部410的长形介质的重量,减轻升降机构90的负荷。
[0169]
而且,在本例中,升降机构90除了具备实施方式1中使装载底板31升降的结构之外,还具备用于使追加装载部403升降的多个悬挂部405、多个丝材406以及多个引导带轮407,通过多个丝材406悬挂支承追加装载部403,而且在将多个丝材406架设于主体部300侧的升降机构90的作为现有结构要素的引导带轮96之后,将各丝材406的一端侧固接于作为现有结构要素的卷绕带轮97,使作为现有结构要素的驱动马达98旋转,由此使追加装载部403和专用装载部422在同一时刻升降。
[0170]
而且,在追加装置401的外置壳体402内的追加装载部403的周围设置有定位引导长形介质的与送出方向交叉的宽度方向的两侧的追加侧导向件432(具体而言为432a、
432b),并且相对于追加装载部403兼用现有的端部导向件33,而且在该追加侧导向件432装备有追加悬浮机构440,并且设置有防止在长形介质悬浮时侧方缘部过于浮起的追加介质限制单元450。另外,图22中的符号441为追加悬浮机构440的空气吹出口,追加介质限制单元450设置在空气吹出口441的附近。
[0171]
这样,在使用长形选项400的介质供给装置11中,在长形装载部410中容纳有长形介质,通过升降机构90将长形介质的表面配置在预先规定的位置,在该状态下等待介质的供给指示。
[0172]
然后,若发出介质的供给指示,则实施如下介质供给动作:悬浮机构70以及追加悬浮机构440工作,使长形介质悬浮,通过真空头50吸附所悬浮的长形介质的送出方向侧的上表面部并搬送到送出辊40,并且通过空气分开机构80一张一张地分开长形介质的送出方向侧端部,并交接给送出辊40。
[0173]
此时,观察到与通常尺寸的介质相比长形介质容易斜行的倾向,但是在本例中,在能够检测长形介质的送出方向侧端部的状态并且容易判别长形介质的供给状态是容许范围还是异常范围的方面极其有效。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。