容器阀结点系统
相关申请的交叉引用
1.本技术于2020年9月15日提交的申请序列号为17/021,140(代理机构案卷号55700.7us01)的美国专利申请,其公开内容通过引用整体并入本文。
技术领域
2.本公开总体上涉及一种容器,更具体地,涉及一种用于容器阀的封闭安全系统。
背景技术:
3.容器可用于存储、运输和包装各种产品。例如,中型散装容器(ibc)、筒、桶、瓶子和/或其他容器被设计用于运输和存储散装液体和颗粒状物质,例如化学品、食品成分、溶剂、药品、危险物料和/或本领域已知的各种其他商品和产品。容器通常提供一个或多个开口,该开口允许通向容器,容器可以通过该开口充满产品,和/或通过开口可以从容器分配产品。在运输和存储期间,这些开口可能被各种封闭件阻塞,例如帽、塞子、顶盖、阀、盖子和其他封闭件。这些封闭件为容器以及在容器内运输和/或存储的产品提供了许多好处,例如,防止容器内的产品逸出,防止来自容器外部的物料通入容器并污染产品,防止变质,以及对于本领域技术人员显而易见的其他用途。
4.常规的封闭件试图通过包括密封件来提供容器安全性,所述密封件在破裂时指示容器是否在用产品填充容器之前或之后被打开。由于某些产品以容器运输这一性质,密封件对于跟踪和确定容器内的产品是否已被篡改(例如丢失、被盗和/或受污染)和/或出于合法目的使用而言可能很重要。例如,农用化学工业中使用的高价值液体可能被盗和/或被伪造产品替代,食品工业中使用的产品可能需要完整性和/或可追溯性。这种常规的容器安全系统提供了通过目视检查密封件来检测容器是否经历过篡改的能力。然而,这些常规容器安全系统受到规避。例如,可能密封件破裂,封闭件被移除,容器中的产品被替代、稀释或被盗(例如,在运输过程中),封闭件和密封件随后被复制并替换在容器上,从而无法检测到产品的篡改。
技术实现要素:
5.根据一个实施例,提供了一种容器系统,包括:容器,所述容器包括容器底盘,所述容器底盘限定了容器容积和具有第一孔口的容器出口;阀系统,所述阀系统联接至所述容器出口;和容器阀结点系统,其中,容器阀结点系统包括:阀系统联接装置,所述阀系统联接装置将所述容器阀结点系统联接至所述容器出口或所述阀系统中的至少一者;和结点装置,所述结点装置联接至所述阀系统联接装置,其中,所述结点装置包括结点底盘,所述结点底盘容纳:通信系统;处理系统,所述处理系统联接至所述通信系统;和内存系统,所述内存系统联接至所述处理系统并且包括指令,当所述指令由所述处理系统执行时,引起所述处理系统提供容器引擎,所述容器引擎配置为:经由通信系统来传达与所述容器系统相关联的容器系统信息。
6.根据另一实施例,提供了一种容器阀结点系统,包括:阀系统联接装置,所述阀系统联接装置构造成联接于以下两者的至少一者:由限定容器容积的容器底盘所限定的容器出口,或构造成联接至所述容器出口的阀系统;和结点装置,所述结点装置联接至所述阀系统联接装置,其中,所述结点装置包括结点底盘,所述结点底盘容纳:通信系统;处理系统,所述处理系统联接至所述通信系统;和内存系统,所述内存系统联接至所述处理系统并且包括指令,当所述指令由所述处理系统执行时,引起所述处理系统提供容器引擎,所述容器引擎配置为:经由通信系统来传达与所述容器系统相关联的容器系统信息。
7.根据另一实施例,提供了一种阀系统联接装置,包括:至少一个带部分,所述至少一个带部分构造成联接于或者脱离于以下两者的至少一者:由限定容器容积的容器底盘所限定的容器出口,或构造成联接至所述容器出口的阀系统;和结点装置接合构件,所述结点装置接合构件联接至阀系统联接系统,并且包括至少一个结点装置固定元件,所述结点装置固定元件当使用第一力而接合于相应的至少一个带固定元件时,需要大于第一力的第二力来使得所述至少一个结点装置固定元件从相应的至少一个带固定元件脱离。
附图说明
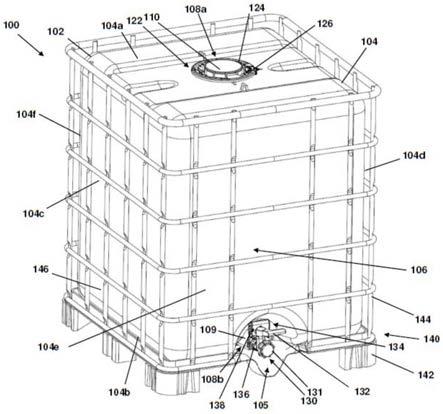
8.图1是示出了容器系统的实施例的立体图。
9.图2是示出了连接到由图1的容器系统的容器的容器底盘所限定的容器出口的容器封闭系统的实施例的立体图。
10.图3a是示出了包括在图1的容器系统的容器阀结点系统中的阀系统联接装置的实施例的立体图。
11.图3b是示出了图3a的阀系统联接装置的实施例的俯视图。
12.图4a是示出了包括在图1的容器阀结点系统中的结点装置的实施例的立体图。
13.图4b是示出了包括在图1的容器阀结点系统中的结点装置的实施例的示意图。
14.图5是示出了将容器阀结点系统联接至阀系统的方法的实施例的流程图。
15.图6a是示出了在图5的方法期间固定到阀系统的容器阀结点系统的实施例的立体图。
16.图6b是示出了在图5的方法期间固定到阀系统的容器阀结点系统的实施例的前视图。
17.图6c是示出了在图5的方法期间沿着图6b中的平面a-a的容器系统的实施例的截面图。
18.图7是示出了用于提供容器安全性的方法的实施例的流程图。
19.通过参考下面的详细描述可以理解本公开的实施例。应当理解,相同的附图标记用于标识在一个或多个附图中图示的相似的元件,其中所示是为了示出本公开的实施例而不是为了限制本公开。
具体实施方式
20.本公开的实施例包括容器阀结点系统,以及用于将容器阀结点系统联接至容器封闭系统并且执行可用于跟踪对于容器及其内容物的进入的容器系统事件动作的方法。如上所述,用于容器的现有密封件和封闭件不能防止对容器和提供在那些容器中的产品的篡
改,因为已经发现,传统的封闭件和密封件容易在被篡改的容器上复制和更换,因此与容器相关的合法方(例如,容器制造商、容器填充方、容器运输方、容器最终用户和其他方)很难检测到对于封闭件和/或密封件的篡改。此外,一些行业可能要求在容器的生命周期内跟踪对于容器容积的进入,并且传统的密封件和封闭件缺乏跟踪能力。此外,诸如中型散装容器(ibc)之类的容器通常是标准化的,并且包括诸如封闭件和阀之类的标准部件,这些部件允许最终用户使用专门为标准部件设计的工具来快速填充、清空和/或清洁ibc。例如,当移除存储在容器中的内容物时,各种软管和附件可以联接至阀系统。
21.如本领域技术人员将理解的那样,ibc通常经历特定的容器生命周期,其中ibc是在高度组织化的装配线上制造的,运送给客户,客户用物料填充ibc,随后运送至最终用户,最终用户将物料从ibc清出,然后返回至制造商进行翻新,翻新包括将ibc分解为各种部件以进行再利用和回收。因此,当添加封闭安全系统和结点装置时,例如由本公开的一些发明人开发的那些,以及在美国专利10,538,371中描述的和在2019年6月25日提交的标题为“容器安全系统(container security system)”的美国专利申请16/451,879中描述的,其公开内容通过引用整体并入本文并且提供了对容器封闭件和/或容器是否经历容器系统事件(例如篡改事件)的检测,则必须考虑这些制造和工具要求,以免不适当地破坏ibc的生命周期。
22.在本公开的多个实施例中,公开了一种容器阀结点系统。容器阀结点系统可以包括将容器阀结点系统联接至阀系统的阀系统联接装置。阀系统可以联接至容器出口,该容器出口提供至容器(例如,ibc)的容器开口。阀系统可用于选择性地允许物料通过容器出口移入或移出容器容积。在本公开中示出和讨论的特定示例中,阀系统可以是ibc的阀系统。然而,掌握本公开的本领域技术人员将认识到,其他容器封闭件和阀系统将从本公开的教导中受益。阀系统联接装置可以包括至少一个带部分,该至少一个带部分构造成与包括在阀系统上的阀壳体和/或由容器底盘限定的容器出口相接合。阀系统联接装置当与阀系统和/或容器出口联接时,可以防止阀系统联接装置和容器阀结点系统装置相对于阀系统和/或容器底盘发生旋转运动。换言之,如果经常被拧到容器出口上的阀系统发生转动,则容器阀结点系统将随阀系统一起转动,反之亦然。该至少一个带部分当联接在一起并与阀系统和/或容器出口相接合时,还可以防止阀系统联接装置和容器阀结点系统相对于阀系统和容器底盘在其他方向上发生运动,或者提供对阀系统联接装置和容器阀结点系统相对于阀系统和容器底盘的其他方向运动的抵抗力。
23.容器阀结点系统还可以包括结点装置,该结点装置可以包括上述容器阀结点系统的一些或全部部件。该结点装置可以通过包括在至少一个带部分中的结点装置接合构件而联接至阀系统联接装置的带部分。在一些实施例中,结点装置可以通过结点装置释放构件而从结点装置接合构件脱离。结点装置和阀系统联接装置构造成使得当与阀系统接合时,结点装置底盘基本上邻近于包括在阀系统和/或容器底盘上的手柄和/或杆,从而结点装置可以通过包括在结点装置上或结点装置中的一个或多个传感器来监视阀系统中阀元件的阀取向和/或容器容积的内容物的水平。
24.在多个实施例中,结点装置包括电源、至少一个传感器、可能包括一种或多种类型的通信接口的通信系统,以及处理系统。结点装置还可以包括存储系统,该存储系统联接至处理系统并且包括指令,该指令在由处理系统执行时使处理系统提供容器引擎,该容器引
擎通过至少一个传感器来检测容器系统事件的发生,并通过通信系统来提供对于该容器系统事件的容器系统事件通知。这样,本公开的容器阀结点系统可以提供相对容易且快速的容器阀结点系统和结点装置的附接和拆卸,其为容器系统提供安全性而不会破坏常规的容器生命周期并允许使用常规工具来触及阀系统。
25.现在参考图1,示出了容器系统100的实施例。容器系统100包括具有容器底盘104的容器102,该容器底盘104包括:顶壁104a、与容器底盘104的顶壁104a相对的底壁104b、以及容器底盘104的彼此相对的并在顶壁104a和底壁104b之间延伸的相对的一对侧壁104c和104d。容器底盘104可以包括在顶壁104a、底壁104b以及侧壁104c和104d之间延伸的前壁104e,以及与容器底盘104的前壁104e相对的并在顶壁104a、底壁104b以及侧壁104c和104d之间延伸的后壁104f。容器底盘104的顶壁104a、底壁104b、侧壁104c和104d、前壁104e和后壁104f限定了容器容积106。在所示的实施例中,顶壁104a限定了容器孔口108a,前壁104e限定了容器孔口108b,该容器孔口108b位于底壁104b附近,从而流体或其他物料可以经由容器孔口108b而移入或移出容器容积106。在一些实施例中,容器底盘104可以限定容器出口109,该容器出口109限定了容器孔口108b。更进一步,容器底盘104可以限定阀系统凹口105,该阀系统凹口105可以被限定为使得当包括阀系统132的容器封闭系统130联接至容器出口109时,容器封闭系统130最小地延伸(如果有的话)经过前壁104e的平面。这样,阀系统凹口105可以提供空间,在该空间处可以设置容器封闭系统130,以最小化在容器系统100的运输期间对容器封闭系统130的损坏。容器封闭系统130在阀系统凹口105内的位置还可以允许多个容器阀系统的堆叠和存储而没有阀系统132干扰。尽管在下面示出并描述了容器102的特定示例(例如,ibc),但是本领域技术人员将认识到,本公开的教导有益于对于掌握本公开的本领域技术人员而言显而易见的容器系统(该容器系统包括各种容器,例如,桶、筒、瓶子和/或其他容器,和/或可能位于壁104a-104f中的任何一个上的其他容器孔口),因此包括那些容器的系统也将落入本公开的范围内。
26.在多个实施例中,容器系统100可以包括在顶壁104a上联接于容器102的容器封闭件110。容器封闭件110当联接至顶壁104a时可以被配置成用于防止容器容积106的内容物(例如,物料、物质和/或产品)经由容器孔口108a而移入和/或移出容器容积106。尽管下面示出和描述了容器封闭件110的特定示例,但是掌握本公开的本领域技术人员将认识到,本公开的教导将对其他容器封闭件有利,并且可以设置在壁104a-104f中的任何一个上,以防止物料、物质和/或产品经由设置在一个或多个壁104a-104f上的一个或多个容器孔口而移入和/或移出容器,因此,包括那些容器封闭件的系统也将落入本公开的范围内。
27.在多个实施例中,容器系统100可以包括容器封闭件结点系统122。容器封闭件结点系统122可以包括封闭件底盘联接装置124,该封闭件底盘联接装置124被配置为将容器封闭件结点系统122联接至容器封闭件110。容器封闭件结点系统122可以包括结点装置126,该结点装置126联接至封闭件底盘联接装置124。这样,容器封闭件结点系统122可以是与本公开一起于2020年9月15日提交的美国专利申请号为17/021,140、代理机构案卷号为55700.7us01中所描述的容器封闭件结点系统122。掌握本公开的本领域技术人员将认识到,本公开内容的实施方式可以如何与以上讨论的本公开内容的一些或全部组合,因此该公开内容通过引用整体并入本文。
28.在多个实施例中,容器系统100可以包括容器封闭系统130。容器封闭系统130可以
联接至容器孔口108b,并且被配置为用于防止和/或允许容器102的内容物经由容器孔口108b移入和/或移出容器容积106。在所示的示例中,容器封闭系统130可以包括容器封闭件131和阀系统132,下面将进一步详细描述。尽管示出了特定的容器封闭系统130,但是掌握本公开的本领域技术人员将认识到,可以提供能够从本公开的教导中受益的其他容器封闭件。
29.在多个实施例中,容器系统100可以包括容器阀结点系统134。容器阀结点系统134可以包括阀系统联接装置136和结点装置138。在多个实施例中,结点装置138可以包括处理系统、内存系统、短距离通信接口,并且在一些实施例中,可以包括长距离通信接口,以及在美国专利10,538,371中被描述为容器模块,以及在2019年6月25日提交的标题为“容器安全系统(container security system)”的美国专利申请16/451,879中所描述的内容,其全部公开内容通过引用合并于此。尽管示出了特定的容器阀结点系统134,但是掌握本公开的本领域技术人员将认识到,还可以提供能够受益于本公开的教导的其他容器阀结点系统。
30.在多个实施例中,容器系统100还可以包括配置成容纳该容器102的笼系统140。笼系统140可以包括联接至笼144的托盘基座142。尽管已经示出和描述了特定的容器系统100,但是掌握本公开的本领域技术人员将认识到,在本公开的范围内,本公开的容器系统100还可以包括多种部件和部件配置。
31.现在参考图2,示出了容器封闭系统200的实施例,其可以提供包括在以上参考图1所讨论的容器系统100中的容器封闭系统130。容器封闭系统200可以包括:容器封闭件202,其可以提供以上参考图1所讨论的容器封闭件131;以及阀系统204,其可以提供以上参考图1所讨论的阀系统132。阀系统204可以包括阀壳体206,该阀壳体206限定了连接容器出口端口208a和前端口208b的内部腔室208。容器出口端口208a可以与容器出口109联接。例如,容器出口109可以包括内螺纹和/或外螺纹,从而容器出口端口208a可以螺纹连接至容器出口109。在一些示例中,容器出口端口208a可以被插入到容器孔口108b中,并且配件可以被螺纹连接到容器出口109上以将阀壳体206联接至容器出口109。然而,掌握本公开的本领域技术人员将认识到,阀系统204可以在本公开的范围内以多种方式联接至容器出口109。
32.在多个实施例中,阀元件210可以旋转地支撑在内部腔室208中,以在阀打开取向和阀闭合取向之间运动。阀元件210可包括蝶形阀、球阀或任何其他对于掌握本公开的本领域技术人员而言显而易见的阀。在阀打开取向中,阀元件210中的开口对准于前端口208b和容器出口端口208a。在阀闭合取向中,开口定向在垂直于阀元件210的纵向轴线的平面中,使得在前端口208b和容器出口端口208a之间没有流体连通。手柄212包括杆214。杆214延伸穿过壳体开口以与阀元件210可操作地联接,以使阀元件210在打开取向和闭合取向之间选择性地旋转。在多个实施例中,手柄212和/或杆214可以包括传感器元件216,该传感器元件216可以包括传感器(例如,运动传感器)和/或传感器检测元件(例如,待由霍尔效应传感器感测的磁体)。传感器元件216可以被包括在手柄212和/或杆214中,使得当阀元件210在打开取向和闭合取向之间选择性地旋转时,传感器元件216可以与手柄212和/或杆214一起旋转。
33.在多个实施例中,容器封闭件202可以被配置为联接至前端口208b。例如,容器封闭件202可以包括前端口208b可以螺纹连接到容器封闭件202的内螺纹和/或外螺纹。在一些示例中,容器封闭件202可以是螺纹连接至前端口208b上的帽、与前端口208b摩擦联接的
帽、通过前端口208b插入到阀壳体206中的塞子、和/或对于掌握本公开的本领域技术人员而言显而易见的当阀元件处于打开取向和闭合取向时能够阻止物料经由容器102的容器孔口108b而发生运动的任何其他容器封闭件。
34.现在参考图3a和3b,示出了阀系统联接装置300的实施例,该阀系统联接装置300可以提供包括在以上参考图1所讨论的容器阀结点系统134中的阀系统联接装置136。阀系统联接装置300可以构造成将容器阀结点系统134联接至容器出口109和/或阀系统132,参照图1。在一些实施例中,阀系统联接装置300可以在阀系统132联接至容器出口109之前和/或在阀系统132联接至容器出口109之后而被联接至容器出口109和/或阀系统132。在图3a和3b所示的实施例中,阀系统联接装置300可以包括带部分302。尽管在图3a和3b中示出了单个带部分302,但是阀系统联接装置300可以包括彼此联接以形成带部分302的任何数量的带部分。带部分302可以包括c形带,该c形带可以被配置成位于被包括在阀系统132/204和/或容器出口109中的阀壳体206的周围。带部分302可以包括第一端302a和第二端302b,第二端302b与至少一个带部分302的第一端302a相对。带部分302还可以包括第一表面302c和与带部分302的第一表面302c相对的第二表面302d,并且第一表面302c和第二表面302d在第一端302a和第二端302b之间延伸。带部分302还可包括在第一端302a、第二端302b以及第一表面302c和第二表面302d之间延伸的第一边缘302e,以及与带部分302的第一边缘302e相对的并在第一端302a、第二端302b以及第一表面302c和第二表面302d之间延伸的第二边缘302f。带部分302可以具有宽度304。当阀系统132/204联接至容器出口109时,宽度304可以小于杆214和容器出口109之间的距离,使得带部分302可以位于杆214和容器出口109之间。带部分302也可以具有长度306,该长度306至少等于阀壳体206的周长和/或容器出口109的周长,如图1和2所示。
35.带部分302可以包括联接至带部分302的第一端302a的带固定元件308a和联接至带部分302的第二端302b的带固定元件308b。在多个实施例中,带固定元件308a可以与带固定元件308b相接合。例如,带固定元件308a可以包括固定元件接合构件309a,该固定元件接合构件309a接合带固定元件308b上的对应的固定元件接合构件309b。固定元件接合构件309a和固定元件接合构件309b可以摩擦地联接,从而一旦施加了与用于接合的力相反的力阈值,则固定元件接合构件309a和固定元件接合构件309b将相互脱离。然而,在其他示例中,固定元件接合构件309a和固定元件接合构件309b的接合可以锁定固定元件接合构件309a和固定元件接合构件309b,使得带部分302必须被破坏才能脱离固定元件接合构件309a和固定元件接合构件309b之间的接合。在其他示例中,固定元件接合构件309a和固定元件接合构件309b的接合可以临时锁定固定元件接合构件309a和固定元件接合构件309b。固定元件释放构件(未示出)可以包括在带固定元件308a和带固定元件308b中的至少一者中,以使固定元件接合元件309a和固定元件接合元件309b相互脱离。在所示的实施例中,固定元件接合构件309a和309b可以包括孔口,紧固件可以通过孔口而被插入并用于将带固定元件308a和带固定元件308b彼此固定。虽然带固定元件308a和带固定元件308b被示出为彼此联接,但是可以设想,带固定元件308a和308b可以联接至一个或多个另外的带部分上的对应的带固定元件。
36.在多个实施例中,当带部分302联接至容器出口109和/或阀系统132/204时,固定元件接合构件309a和309b的固定可以将带部分302和阀系统联接装置300固定至容器出口
109和/或阀系统132/204,使得带部分302和阀系统联接装置300不能相对于容器底盘104和阀系统132/204而发生运动。例如,当固定元件接合构件309a和309b彼此接合时,带部分302可以摩擦地联接至容器出口109和/或阀系统132/204,从而产生足够的压力,以使带部分302的第一表面302c接触于容器出口109和/或阀系统132/204,以提供足够的摩擦力,使得带部分302不能沿着容器出口109和/或阀系统132/204的各轴线而发生旋转或运动。在其他实施例中,带部分302可以包括一个或多个另外的阀系统固定元件,其被配置为接合阀系统132/204的一个或多个部件,以将带部分302固定至容器出口109和/或阀系统132/204。
37.在多个实施例中,阀系统联接装置300可以包括结点装置接合构件312。结点装置接合构件312可以被构造成将图1的结点装置138接合并联接至阀系统联接装置300。例如,结点装置接合构件312可以被构造成将结点装置138接合并固定至带部分302。在图3的所示实施例中,结点装置接合构件312从带部分302的第一表面302c延伸。带部分302可以包括结点固定元件接合构件(未示出),该结点固定元件接合构件可以被构造成将带部分302固定至结点装置接合构件312。然而,在示出的实施例中,结点装置接合构件312可以由带部分302的第一表面302c限定。结点装置接合构件312可以被配置为使得当结点装置138与结点装置接合构件312接合并且带部分302与容器出口109和/或阀系统132/204接合时,如下面更详细地讨论的结点装置138上所包括的一个或多个传感器基本上邻近于图1的容器102的容器底盘104、图1和图2的阀系统132/204的手柄212和/或阀系统132/204的杆214。
38.结点装置接合构件312可以包括限定了槽313的一个或多个结点装置固定元件312a、312b和/或312c。结点装置固定元件312a可以被构造成接合结点装置138,并且当结点装置138位于槽313中时防止结点装置138沿着x轴在至少一个方向上运动。结点装置固定元件312b可以构造成接合结点装置138,并且防止结点装置138沿着x轴在至少与结点装置固定元件312a沿着x轴将结点装置138进行固定的方向相反的方向上发生运动。结点装置固定元件312b还可以被构造成在结点装置138置于槽中时防止结点装置138沿着z轴和y轴运动。结点装置固定元件312c可以被构造成接合结点装置138,并且防止结点装置138沿着y轴在至少与结点装置固定元件312b沿着y轴对位于槽313中的结点装置138进行固定的方向相反的方向上发生运动。
39.结点装置固定元件312a、312b和/或312c中的一个或多个可以包括结点装置释放构件314。在所示的示例中,结点装置固定元件312a可以包括结点装置释放构件314,当由用户激活时,该结点装置释放构件314可以释放结点装置固定元件312a,使得结点装置138可以沿着结点装置固定元件312a阻止结点装置138发生运动的一个或多个方向而运动。例如,当对结点装置释放构件314施加力时,结点装置释放构件314可以压缩结点装置固定元件312a,使得结点装置固定元件312a不再接合结点装置138(例如,下面将讨论的,包括在结点装置138上的带固定元件),并且,结点装置138可以沿着x轴运动以通过滑出槽313而脱离于结点装置接合构件312。尽管已经示出和描述了特定的阀系统联接装置300,但是掌握本公开的本领域技术人员将认识到,本公开的阀系统联接装置300在本公开的范围内可以包括多种部件和部件配置。
40.现在参考图4a和4b,示出了结点装置400的实施例,该结点装置400可以提供以上参考图1所讨论的容器阀结点系统134中所包括的结点装置138。结点装置400包括结点底盘402,该结点底盘402包括顶壁402a、与结点底盘402的顶壁402a相对的底壁402b、以及位于
结点底盘402的彼此相对的并在在顶壁402a和底壁402b之间延伸的一对侧壁402c和402d。结点底盘402可以包括在顶壁402a、底壁402b,以及侧壁402c和402d之间延伸的前壁402e,以及与结点底盘402的前壁402e相对的并在顶壁402a、底壁402b以及侧壁402c和402d之间延伸的后壁402f。结点容积404由结点底盘402的顶壁402a、底壁402b、侧壁402c和402d、前壁402e和后壁402f所限定。在所示的实施例中,顶壁402a、底壁402b、侧壁402c和402d、前壁402e和/或后壁402f可以限定部件通入孔口(未示出),该部件通入孔口可用于通入容纳在结点容积404内的任何结点部件。
41.在多个实施例中,结点底盘402可以包括带固定元件405a和/或带固定元件405b。带固定元件405a可以由结点底盘402限定,使得带固定元件405a可以从前壁402e处延伸。带固定元件405a可以被配置为与图3a和3b的结点装置固定元件312b接合。带固定元件405b可以由底壁402b限定,底壁402b可以限定构造成与结点装置固定元件312a接合的凹进或凹口。尽管示出了特定的带固定元件405a和405b,但是可以设想,那些带固定元件可以由其他结点底盘壁来限定,和/或另外的带固定元件可以由结点底盘402的壁402a-402f来限定。
42.此外,尽管作为结点装置400示出和讨论,但是掌握本公开的本领域技术人员将认识到,以下讨论的结点装置400的功能可以由被配置为如下所讨论的类似地操作的其他装置提供。在所示的实施例中,结点装置400包括结点底盘402,结点底盘402将结点装置400的部件容纳在结点容积404中,下面仅示出其中的一些。例如,结点底盘402可以容纳处理系统(未示出,但是可以由处理器提供)和联接至处理系统并包括指令的内存系统(未示出,但是可以由系统内存(例如,诸如动态ram(dram)、同步dram(sdram)、固态存储装置的随机存取存储器(ram)装置,和/或本领域已知的各种其他内存装置)提供),这些指令当由处理系统执行时,使得处理系统提供容器引擎406,该容器引擎406配置为用于执行以下讨论的容器引擎和/或结点装置的功能。尽管讨论了处理系统和内存系统以提供容器引擎406,但是容器引擎406也可以由专用集成电路(asic)、现场可编程门阵列(fpga)、复杂可编程逻辑装置(cpld)来提供,和/或由(被配置为使得以下所讨论的通信接口响应于安全传感器生成的安全传感器信号而提供容器信息、安全性通知、和/或其他信息的)任何其他硬件电路来提供。
43.结点底盘402还可以容纳存储系统(未示出,但可以包括大容量存储装置,其可以包括硬盘、光盘、磁光盘、固态存储装置和/或本领域已知的各种其他大容量存储装置),该存储系统(例如,经由存储系统和处理系统之间的联接)联接至容器引擎406,并且该存储系统包括结点数据库408,该结点数据库408被配置为用于存储以下讨论的由容器引擎406所利用的任何信息。
44.结点底盘402可以进一步容纳通信系统410,该通信系统410(例如,经由通信系统410与处理系统之间的联接)联接至容器引擎406。通信系统410可以包括存储在计算机可读介质上并且允许结点装置400通过本文描述的通信网络发送和接收信息的软件或指令。例如,通信系统410可以包括通信接口410a(例如,第一(例如,相对长距离的)收发器)以通过广域网(wan)提供通信。在一实施例中,通信接口410a可以包括无线天线,该无线天线被配置为经由ieee 802.11协议(wi-fi)、蜂窝通信、卫星通信、其他微波无线电通信和/或利用对于掌握本公开的本领域技术人员而言显而易见的任何其他通信技术来提供通信。通信系统410还可以包括通信接口410b(例如,第二(例如,相对短距离的)收发器),其被配置为用于提供与用户装置、传感器、其他结点装置和/或在结点装置400(例如,结点装置126)附近
的其他装置直接通信,并且通过局域网(lan)提供通信。例如,通信接口410b可以被配置为根据诸如low energy(ble)、近场通信(nfc)、红外通信技术(irda)、ieee 802.11协议(wi-fi)和/或允许此处所描述的直接装置通信的任何其他无线通信协议来操作。
45.结点底盘402还可以容纳电源系统412,该电源系统412可以包括一个或多个电池412a和/或配置为联接至一个或多个电池412a。例如,电源系统412可以包括能够使用本领域中已知的方法在结点底盘402中充电的集成可再充电电池,和/或可以包括对于掌握本公开的本领域技术人员而言显而易见的其他电源。例如,电源系统412和结点底盘402可以被配置为在本公开的范围内接受可更换的、不可充电的/可充电的电池。电源系统412可以经由电源总线413联接至容器引擎406、结点数据库408,通信系统410和/或传感器系统414。
46.结点底盘402也可以容纳和/或提供传感器系统414。传感器系统414可以包括一个或多个传感器,该一个或多个传感器获得关于结点装置400、阀系统132、容器底盘104、和/或容器容积106周围的环境的信息。例如,传感器系统414可以包括阀取向传感器414a(例如,霍尔效应传感器或其他运动传感器),其置于邻近于前壁402e和/或容纳在结点底盘402中的其他位置,使得阀取向传感器414a可以检测阀元件210相对于结点装置400(例如,将阀元件210定位在打开取向和闭合取向之间的手柄212和/或杆214)的运动。例如,阀取向传感器414a可以包括霍尔效应传感器,该霍尔效应传感器可以在第一位置范围内检测由(联接至和/或嵌入杆214和/或阀系统204的手柄中的)图2的传感器元件216提供的磁场,并且在该第一位置范围内向容器引擎406提供第一信号。当传感器元件216在第一位置范围之外时,霍尔效应传感器还可以检测到不存在磁场或存在弱磁场(例如,处于或低于磁场阈值)并产生第二信号(例如,该信号表示传感器元件216已相对于阀取向传感器414a发生运动,表示阀元件210处于另一取向(例如,打开取向))。容器引擎406可以记录每个打开取向事件和闭合取向事件,并在打开取向事件和闭合取向事件发生时将时间与每个事件相关联,并将事件存储在结点数据库408中。容器引擎406还可以在每次阀取向改变时生成阀事件通知,从而容器引擎406可以经由通信接口410a在wan上和/或经由通信接口410b在lan上提供通知。尽管霍尔效应传感器被描述为检测阀壳体206中的阀元件210的运动,但是本领域的技术人员将认识到,阀取向传感器414a可以包括可以检测阀元件210的位置/取向(例如,打开或闭合位置)的其他传感器。
47.在另一示例中,传感器系统414可以包括其他传感器,诸如水平传感器414b。水平传感器414b可被包括在结点底盘402的后壁402f和/或其他壁上,使得当包括结点装置400的容器阀结点系统134联接至阀系统132/204时,水平传感器414b与容器底盘104相邻。在一个示例中,水平传感器414b可以包括温度传感器。因为容器102的内容物是液体或可能是颗粒状固体,所以容器102的内容物可以具有比容器底盘104周围的空气更高的热容量(或不同的热容量)。容器底盘104将以与容器系统100周围的环境空气的温度不同的速率变化。因此,水平传感器414b处的温度变化速率可以满足预定的温度变化,其表明容器容积106的内容物下降到低于邻近容器底盘104的水平传感器414b的位置的水平。因此,容器引擎406可以监视由水平传感器414b提供的温度信号,并且当温度变化率由超过预定温度变化阈值的温度信号指示时,则容器引擎406可以生成水平通知。在其他实施例中,容器引擎406可以使用由水平传感器414b提供的温度信号来监视其他温度条件(例如,预定温度阈值),该其他
温度条件使得容器引擎406生成温度通知(例如,容器的内容物是否太热和/或太冷)。在其他实施例中,水平传感器414b可以包括电容传感器,当容器体积106的内容物的水平下降到与容器底盘104相邻的液位传感器414b的位置以下时,则该电容传感器可以检测容器底盘104的电容变化。这样,容器引擎406可以监视由水平传感器414b提供的电容信号,并且当由电容信号指示的电容变化满足预定电容阈值时,容器引擎406可以生成水平通知。容器引擎406可以在结点数据库408中存储任何水平传感器信息和/或水平通知,并且可以将时间与每个水平传感器信息和/或水平通知相关联。在多个实施例中,容器引擎406可以经由通信接口410a在wan上和/或经由通信接口410b在lan上提供水平传感器信息和/或水平通知。
48.在多个实施例中,水平传感器414b、阀取向传感器414a提供的信息和/或通信系统410的各通信接口410a和/或410b的信号强度的组合可用于检测指示至少结点装置400已从容器底盘104上卸下的容器阀结点系统脱离事件。例如,由水平传感器414b、阀取向传感器414a提供的信息和/或通信系统410的各通信接口410a和/或410b的信号强度可以检测到结点装置400已经脱离于阀系统联接装置300,阀系统联接装置300已经脱离于阀系统204和/或容器出口109,或结点装置400/阀系统联接装置136/300已经相对于结点装置400应当处于的位置而发生了运动(例如,带部分302绕阀壳体206旋转)。例如,经由传感器系统414的容器引擎406可以基本上同时检测由阀取向传感器414a和水平传感器414b提供的信号的变化,其可以指示从其相对于容器底盘104和阀系统132/204的位置移除结点装置400。在另一示例中,通信接口410a和410b中的一个或多个的信号强度可以与由阀取向传感器414a和/或水平传感器414b提供的传感器信号基本同时地变化。然而,在其他实施例中,结点装置400可以包括另外的运动传感器,其检测结点装置400相对于阀壳体206和/或容器底盘104的运动。例如,运动传感器可以包括位于结点底盘402的底壁402b中的霍尔效应传感器,并检测位于阀壳体上的磁体。在另一示例中,霍尔效应传感器可以位于结点底盘402的后壁402f和/或顶壁402a中,并检测位于容器底盘104上的磁体。如此,当霍尔效应传感器不再检测得到位于阀系统132/204和/或容器底盘104的静态部件上的磁体时,霍尔效应传感器可以向容器引擎406提供运动信号,其指示结点装置400已经相对于那些磁体发生运动。容器引擎406可以在结点数据库408中存储任何容器阀结点系统脱离事件,并且可以基于每个容器阀结点系统脱离事件何时发生而将时间与每个容器阀结点系统脱离事件相关联。在多个实施例中,容器引擎406可以经由通信接口410a在wan上和/或经由通信接口410b在lan上提供容器阀结点系统脱离事件通知。
49.尽管已将特定安全传感器414a和414b描述为包括在传感器系统414中,但是掌握本公开的本领域技术人员将认识到,其他安全传感器或信息传感器也可以包括在传感器系统414中。例如,传感器系统414可以包括负载传感器、湿度传感器、化学试剂传感器、位置传感器、取向传感器、压力传感器、运动传感器(例如,加速度计)、震动传感器和/或对于拥有本公开的本领域技术人员而言显而易见的任何其他传感器。
50.在多个实施例中,结点装置400可以包括用户输入和/或输出(i/o)系统416,该系统416可以包括一个或多个用户输入子系统和/或用户输出子系统。例如,用户i/o系统416可以包括按钮416a,该按钮416a可以用于启动或关掉结点装置,提供指令于容器引擎406,和/或对于掌握本公开的本领域技术人员而言显而易见的任何其他功能。在所示的实施例中,按钮位于结点装置400的前壁402e上,但是可以位于任何壁402a-402f上。用户i/o系统
416可以包括一个或多个视觉指示器416b(例如,发光二极管(led)),其可以提供对结点装置400的任何部件的状态(例如,通信接口410a和/或410b的连接的状态,事件通知(例如,水平事件通知、阀门取向通知、容器阀门结点系统脱离事件和/或任何其他事件通知)、动力状态和/或对于拥有本公开的本领域技术人员而言是显而易见的任何其他事件/通知。尽管已经示出了特定的结点装置400,但是掌握本公开的本领域技术人员将认识到,在本公开的范围内,结点装置(或根据本公开的教导以与以下所描述的对于结点装置400的操作方式相似的方式操作的其他装置)也可以包括用于提供以下所讨论的功能的各种部件和/或部件配置。
51.现在参考图5,示出了用于将容器阀结点系统联接至容器的方法500。如上所述,本公开的系统和方法提供了一种具有容器阀结点系统的阀系统,该容器阀结点系统在容器的生命周期中对容易地添加到与容器联接的阀系统或从该阀系统移除。容器阀结点系统可以构造成当阀系统联接至容器底盘时联接至阀系统或从阀系统脱离。然而,在其他实施例中,容器阀结点系统仅可在阀系统联接至容器底盘之前联接至容器,使得当阀系统被移除时,容器阀结点系统可以被移除。容器阀结点系统可以为容器和阀系统提供结点装置,其可以在容器生命周期内检测和报告安全事件(例如,当阀打开和/或闭合时,容器容积的内容物的温度的变化,何时容器容积的内容物达到特定水平时等)。容器阀结点系统可以包括阀系统联接装置,该阀系统联接装置构造成与阀系统的容器出口中的至少一个联接。容器阀结点系统可以包括联接至阀系统联接装置的结点装置,结点装置可以提供容器引擎,该容器引擎通过通信系统传递与容器系统相关联的容器系统信息。容器阀结点系统的构造可以使得当联接至阀系统和/或容器出口时,结点装置基本上邻近于容器底盘以检测容器容积的内容物的水平的变化,和/或基本上邻近于与阀系统的阀联接的杆或手柄,从而当杆或手柄的取向发生变化并被检测到时,产生阀取向事件。这样,结点装置可以跟踪水平事件、阀取向事件以及与容器系统相关的其他事件。尽管在下面示出和描述了用于容器封闭件结点系统的特定部件和部件配置,但是各种各样的部件和部件配置同样被设想为落入本公开的范围内。
52.方法500开始于框502,在框502处,将容器阀结点系统置于容器上并围绕阀系统和/或容器出口。在一实施例中,在框502处并参考图6a、6b和6c,容器阀结点系统134可以位于容器102(例如,前壁104e)上并且围绕阀系统132/204的阀壳体206,如箭头602所示。具体地,阀系统联接装置136/300可以安装在阀壳体206周围。但是,如上所述,除阀壳体206之外或作为其替代方案,阀系统联接装置136/300可以安装在阀壳体206周围。在其他实施例中,在将阀系统204联接至容器出口109之前,阀系统联接装置136/300可以置于容器底盘104和容器出口109附近。
53.方法500然后行进至框504,在框504处,容器阀结点系统被接合并联接于阀系统和/或容器出口。在一实施例中,在框504处并参考图6a、6b和6c,位于带部分302的第一端302a上的带固定元件308a上的固定元件接合构件309a可以被接合并联接至位于带部分302的第二端302b上的带固定元件308b上的固定元件接合构件309b。例如,可以将包括螺栓603a和螺母603b的紧固件系统603插入固定元件接合构件309a和309b中,以将阀系统联接装置136/300(例如,经由容器出口109)联接至阀系统204和/或容器底盘104。可以拧紧螺栓603a和螺母603b,以使带部分302摩擦地固定至阀壳体206和/或容器出口109。在一些实施
例中,当阀系统132/204联接到容器出口109时,容器阀结点系统134可以被接合并联接于阀系统132/204和/或容器出口109。
54.然后,方法500可以行进至框506,在框506处,结点装置联接至阀系统联接装置。在一实施例中,在框506处并且参考图6a、6b和6c,结点装置138/400可以联接至阀系统联接装置136/300,如图6a中的箭头606所示。在一实施例中,可以在将阀系统联接装置136/300联接至阀壳体206和/或容器出口109之前,将结点装置138/400联接至阀系统联接装置136/300。然而,在其他实施例中并且如图6a、6b和6c所示,结点装置138/400可以在阀系统联接装置136/300联接至阀壳体206和/或容器出口109期间或之后联接至阀系统联接装置136/300。例如,带固定元件405a和/或405b可以构造成接合包括对应的结点装置固定元件312a和312b的结点装置接合构件312。在特定示例中并且如箭头606所示,可以将结点装置138/400滑入由结点装置固定元件312a、312b和312c所限定的槽313中。带固定元件405a可以接合结点装置固定元件312a,而带固定元件405b可以接合结点装置固定元件312b。结点底盘402的后壁402f可以接合结点装置固定元件312c。这样并且如图6a和6b所示,当固定至联接于阀壳体206和/或容器出口109的阀系统联接装置136/300时,结点装置138/400可以被定向成使得当阀元件210处于闭合取向时,阀取向传感器414a基本上邻近于包括在杆214/手柄212中的传感器元件216。然而,可以设想,当被固定至联接于阀壳体206和/或容器出口109的阀系统联接装置136/300时,结点装置138/400可以被定向成使得当阀元件210处于打开取向时,阀取向传感器414a基本上邻近于包括在杆214/手柄212中的传感器元件216。在其他实施例中,当被固定至联接于阀壳体206和/或容器出口109的阀系统联接装置136/300时,结点装置138/400可以被定向成使得水平传感器414b基本上邻近于容器底盘104。
55.在方法500的多个实施例中,在将容器阀结点系统134组装并联接至阀系统204和/或容器出口109之后,用户可以将容器阀结点系统134从阀系统204和/或容器出口109上脱离。例如,用户可以从固定元件接合构件309a和309b上移除螺栓603a和螺母603b,以将阀系统联接装置136/300从阀系统204和/或容器底盘104上脱离。在其他示例中,用户可以通过激活使结点装置固定元件312a和带固定元件405b相互脱离的结点装置释放构件314来从阀系统联接装置136/300处移除结点装置138/400。然后,用户可以沿着箭头606的相反方向滑动结点装置138/400。
56.现在参考图7,示出了用于提供容器安全性的方法700。方法700可以开始于框702,在框702处,结点装置检测容器系统事件。在框702的实施例中,结点装置138/400的容器引擎406可以经由传感器系统414和/或通信系统410接收传感器信号和/或事件通知。容器引擎406可以处理传感器信号以确定是否满足任何条件。例如并且参考图6c,容器引擎406可以监视来自阀取向传感器414a的传感器信号。传感器信号可以向容器引擎406指示包括在阀系统204中的阀元件210是在打开取向还是在闭合取向。容器引擎406可以监视指示每个取向的信号,例如以磁场阈值检测到或未检测到来自传感器元件216的磁场。可以基于阀元件的取向的任何变化来检测容器系统事件。
57.在另一示例中并参考图6c,容器引擎406可以监视来自水平传感器414b的传感器信号。例如,如上所述,水平传感器414b可以包括温度传感器,该温度传感器基本上邻近(例如,与容器底盘接触或在预定距离(例如1mm、2mm、5mm和/或对于掌握本公开的本领域技术人员而言显而易见的任何合适距离)之内)容器底盘104。水平传感器414b可以向容器引擎
406提供温度信号。容器引擎406可以监视温度信号,从而如果温度信号满足预定温度条件,则可以检测到容器系统事件。例如,预定温度条件可以是温度变化率、预定阈值温度和/或对于掌握本公开的本领域技术人员而言显而易见的任何其他温度条件。例如,如果容器容积106中的内容物610降至低于或接近水平传感器414b,则水平传感器414b处的温度可以相对迅速地变化,这可以满足温度条件并使容器引擎406确定:已经发生了关于内容物610的水平降至低于水平传感器414b的容器系统事件。
58.在容器引擎406监视的容器系统事件的其他示例中,容器引擎406可以监视结点装置脱离事件。如上所述,容器引擎406可以监视运动传感器,该运动传感器指示结点装置138/400何时与容器底盘104和/或阀系统132/204处于其操作取向,或者结点装置138/400何时不处于其操作取向。容器引擎406可以使用来自运动传感器的信号来确定结点装置脱离事件或结点装置联接事件。在其他示例中,容器引擎406可以监视由阀取向传感器414a、水平传感器414b中的两个或更多个的组合接收的传感器信号和/或通信系统410的信号强度变化,以确定是否结点装置脱离事件已经发生。例如,如果同时或基本同时满足水平条件和阀取向条件(例如的阀打开取向),则容器引擎406可以确定结点装置138/400不再处于其操作取向。在其他示例中,如果在通信接口410a和/或410b处检测到信号强度的变化,并且容器引擎406检测到阀元件210同时或基本同时(例如1秒、2秒等以内)处于打开取向,则容器引擎406可以确定结点装置138/400不再处于其操作取向。由传感器系统414和通信系统410的多个传感器提供的传感器信号的其他组合可以用于确定结点装置138/400在其操作取向上的存在。
59.在其他实施例中,容器引擎406可以经由通信系统410从传感器系统414的其他传感器接收传感器信号和/或从其他结点装置(例如,结点装置126)中的传感器接收传感器信号,并且确定是否这些传感器信号中的任何一个都满足指示容器系统事件的预定条件。在其他示例中,容器引擎406可以从其他结点装置(例如,结点装置126)接收容器事件通知,在该其他结点处,容器事件已经由该结点装置确定。尽管讨论了特定的传感器信号,但是掌握本公开的本领域技术人员将认识到,在本公开的范围内,可以包括在结点装置138/400中的其他传感器可以向容器引擎406提供传感器信号。例如,加速度计可以检测突然的运动,陀螺仪可以指示不正确的取向,和/或上面讨论的可以满足容器系统事件的其他传感器。
60.方法700然后可以行进至框704,在框704处,响应于对容器系统事件的检测并且基于容器系统事件的类型来执行容器事件动作。在一实施例中,在框704处,如果容器引擎406在框702处检测到容器系统事件,则容器引擎406可以基于容器系统事件执行容器事件动作。例如,容器引擎406可以在通信接口410a和/或410b上提供容器系统事件通知,从而服务器装置、另一结点装置、用户装置和/或任何其他装置可以接收容器系统事件通知。容器系统事件通知可以包括容器系统事件的类型、发生容器系统事件的时间,任何相关的传感器信息。容器系统事件通知可以包括对于容器系统100、结点装置138/400、结点装置(例如结点装置126,如果容器系统事件是由与结点装置138/400不同的结点装置检测到的)、阀系统的标识符,和/或容器系统100的部件的任何其他标识符或对于掌握本公开的本领域技术人员而言显而易见的任何其他信息。在其他示例中,容器事件动作可以包括:将容器系统事件通知存储在结点数据库408中,直到通信接口410a已经建立了与wan的链接和/或直到用户装置经由通信接口410b访问容器系统事件通知为止。在又一示例中,容器事件动作可以包
括:容器引擎406经由用户i/o系统416提供容器系统事件的指示(例如,经由视觉指示器416b的视觉指示)。尽管描述了特定的容器事件动作,但是对掌握本公开的本领域技术人员将认识到,在本公开的范围内,也可以执行其他容器事件动作,例如在专利号为10,538,371的美国专利申请中以及于2019年6月25日提交的名为“容器安全系统(container security system)”的美国专利16/451,879中所描述的那些动作。
61.因此,已经描述了提供容器阀结点系统、从容器封闭件附接/释放容器阀结点系统、以及检测和通知容器系统事件的系统和方法。容器阀结点系统可以包括阀系统联接装置,该阀系统联接装置包括可以联接至阀系统和/或容器出口的一个或多个带部分。阀系统联接装置可以包括可以联接于结点装置的结点装置接合构件。当带部分联接于阀系统和/或容器出口时,结点装置可基本上邻近于容器底盘和/或阀系统的手柄或杆,从而结点装置经由传感器系统可以分别监视容器容积中的内容物的水平和/或阀系统中阀元件的取向。结点装置接合构件可以包括结点装置释放构件,结点装置释放构件可被释放以从阀系统联接装置释放结点装置,并且带部分上的固定元件可以脱离,以使带部分能够快速释放,从而快速将容器阀结点系统从阀系统脱离。这样,本公开的系统和方法提供了一种具有容器阀结点系统的阀系统,该容器阀结点系统在容器的生命周期内相对容易地添加到与容器联接的阀系统或从该阀系统移除。容器阀结点系统还相对于阀系统和容器底盘构造成使得可以使用用于移除阀系统或触及阀端口的常规工具。容器阀结点系统可以为容器和阀系统提供容器引擎,其可以在容器生命周期内(例如,当阀系统打开、闭合、温度变化、容器容积的内容物的水平变化、以及对于掌握本公开的本领域技术人员而言显而易见的其他事件时)检测和报告容器系统事件。
62.尽管已经示出并描述了一些说明性实施例,但是在前述公开中考虑广泛的修改、改变和替换,并且在一些情况下,可以仅采用实施例的一些特征而不必相应地使用其他特征。因此,适当地,所附权利要求以与本文公开的实施例的范围一致的方式被宽泛地解释。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
