1.本发明涉及一种巡线迷宫鼠,属于机器人领域。
背景技术:
2.巡线迷宫鼠是基于微处理器、机电控制部件和传感器等装置,能自主地搜索和记忆“迷宫”信息,准确快速地选择最佳路径,顺利地找到“迷宫”终点。传统的电脑鼠只能在特定的16*16迷宫内行走,大大限制了电脑鼠的活动场地,不能充分发挥电脑鼠的运动性能,而且传统的迷宫体积偏大,售价并不便宜,导致初学者负担太大,以至于无法有效的积极推广。
技术实现要素:
3.针对现有技术的不足,本发明提供一种巡线迷宫鼠,可以摆脱特定的迷宫,使其运动的场地更加灵活方便。
4.本发明技术方案如下:
5.一种巡线迷宫鼠,所述系统包括线迷宫电脑鼠运动的纸质迷宫图,记录线迷宫鼠所走路径的红外光感测器,判断前方路口的红外传感器,处理各种交互信息的主控制器,提供动力的左右两个电机,矫正车姿的陀螺仪,为整个系统供电的电源模块。
6.根据本发明,优选的,所述线迷宫电脑鼠运动的纸质迷宫图可以根据自己需求设定尺寸,所述迷宫图由黑白两种颜色构成,白色的道路为线迷宫鼠的行走路径,其余为黑色,所述线迷宫的迷宫路径皆为垂直或水平连接,连接角皆为90度或180度。
7.根据本发明,优选的,所述红外光感测器放置三组在线迷宫鼠中心位置,用来记录所走过的线路。
8.根据本发明,优选的,所述红外传感器放置三组在线迷宫鼠的头部,分别位于最左边、中间、最右边,三组红外传感器判断线迷宫的路口方向。
9.根据本发明,优选的,所述主控制器采用stm32f4系列,所述主控制器与红外传感器相连,所述主控制器与红外光感测器相连,所述主控制器与陀螺仪相连,所述主控制器与电机驱动相连。
10.根据本发明,优选的,所述左右两个电机为自带512线编码器的空心杯电机,所述编码器可以得到电机的速度与位置信息。
11.根据本发明,优选的,所述陀螺仪用来矫正线迷宫鼠转弯的角度。
12.根据本发明,优选的,所述电源模块有两路稳压电路给各个模块供电。
13.本发明的有益效果在于:
14.本发明巡线迷宫鼠系统中,可以方便的为电脑鼠爱好者提供场地,同时减少了开发成本,可以更好的推广巡线迷宫电脑鼠。
附图说明
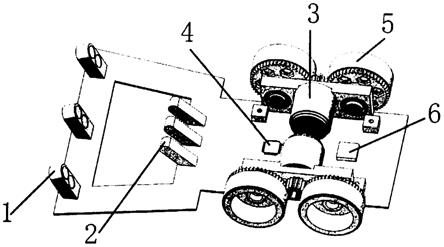
15.图1是本发明整体立体俯视图
16.图2是本发明线迷宫图
17.图3是本发明电源电路框图
18.图4是本发明红外传感器固定座示意图
19.其中:1为红外传感器;2为红外光感测器;3为电机;4为主控制器;5为轮子;6陀螺仪。
具体实施方式
20.下边结合附图并通过具体实施方式来进一步说明本发明的技术方案。
21.请参照图1、2、3所示,一种巡线迷宫鼠系统,包括纸质线迷宫图、主控制器4、红外光感测器2、红外传感器1、电机3、陀螺仪6、电源,所述线迷宫电脑鼠运动的纸质迷宫图可以根据自己需求设定尺寸,迷宫图由黑白两种颜色构成,白色的道路为线迷宫鼠的行走路径,其余为黑色,所述线迷宫的迷宫路径皆为垂直或水平连接,连接角皆为90度或180度,所述红外光感测器2用来记录走过的路径,所述红外传感器1用来检测迷宫图的路口方向,所述红外传感器1与迷宫之间夹角为30度,所述主控制器用来采集红外光感测器2、红外传感器1、陀螺仪6的数据,所述电机3安放在机械架上,所述电机驱动利用h桥驱动两个电机正反转,所述电机3带动轮子5前进或后退,所述左右两个电机为自带512线编码器的空心杯电机,利用编码器可以得到电机3的速度与位置信息,所述陀螺仪6用来修正线迷宫鼠的旋转角度。
22.请参照图3所示,所述电源电路有两路分压,第一路分压用来给陀螺仪电路、编码器电路、红外传感器电路供电,第二路分压用来给红外光感测器电路、主控制器电路供电,主电路直接给电机驱动电路供电。
23.请参照图4所示,所述红外传感器固定座放置在线迷宫鼠的头部,所述红外传感器固定座与迷宫之间角度为30度,这样安放有利于检测前方的道路,防止出现迷路的情况。
24.本发明的操作及运行过程如下:
25.直行:中间红外传感器感测有路,线迷宫鼠处于中间位置,主控制器利用pwm控制左右两个电机以相同的转速前进,红外光感测器同时记录直行走过的路线。
26.左转弯:左侧红外传感器检测到左边有路,线迷宫鼠向左转动,陀螺仪左转90度,主控制器利用pwm控制左电机减速,右电机加速前进,红外光感测器同时记录左转90度走过的路线。
27.右转弯:右侧红外传感器检测到右边有路,线迷宫鼠向右转动,陀螺仪右转90度,主控制器利用pwm控制右电机减速,左电机加速前进,红外光感测器同时记录右转90度走过的路线。
技术特征:
1.一种巡线迷宫鼠,所述系统包括线迷宫电脑鼠运动的纸质迷宫图,记录线迷宫鼠所走路径的红外光感测器,判断前方路口的红外传感器,处理各种交互信息的主控制器,提供动力的左右两个电机,矫正车姿的陀螺仪,为整个系统供电的电源模块。2.如权利要求1所述的巡线迷宫鼠,其特征在于,所述线迷宫电脑鼠运动的纸质迷宫图可以根据自己需求设定尺寸,所述迷宫图由黑白两种颜色构成,白色的道路为线迷宫鼠的行走路径,其余为黑色,所述线迷宫的迷宫路径皆为垂直或水平连接,连接角皆为90度或180度。3.如权利要求1所述的巡线迷宫鼠,其特征在于,所述红外传感器放置三组在线迷宫鼠的头部,分别位于最左边、中间、最右边,三组红外传感器判断线迷宫的路口方向。4.如权利要求1所述的巡线迷宫鼠,其特征在于,所述主控制器采用stm32f4系列,所述主控制器与红外传感器相连,所述主控制器与红外光感测器相连,所述主控制器与陀螺仪相连,所述主控制器与电机驱动相连。5.如权利要求1所述的巡线迷宫鼠,其特征在于,所述红外传感器固定座与线迷宫pcb底板之间角度为30度。
技术总结
本发明公开了一种巡线迷宫鼠,可以摆脱特定的迷宫,使其运动的场地更加灵活方便。一种巡线迷宫鼠系统,包括纸质线迷宫图、主控制器、红外光感测器、红外传感器、电机、陀螺仪、电源,所述迷宫图由黑白两种颜色构成,白色的道路为线迷宫鼠的行走路径,所红外光感测器用来记录走过的路径,红外传感器用来检测迷宫图的路口方向,红外传感器与迷宫之间夹角为30度,主控制器用来采集红外光感测器、红外传感器、陀螺仪的数据,电机安放在机械架上,电机驱动利用H桥驱动两个电机正反转,电机带动轮子前进或后退,左右电机为自带512线编码器的空心杯电机,利用编码器可以得到电机的速度与位置信息,陀螺仪用来修正线迷宫鼠的旋转角度。螺仪用来修正线迷宫鼠的旋转角度。螺仪用来修正线迷宫鼠的旋转角度。
技术研发人员:袁臣虎 董佳丽 米璐晗 周佳文
受保护的技术使用者:天津工业大学
技术研发日:2020.08.24
技术公布日:2022/3/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。