1.本技术涉及机器人领域,涉及一种在机器人头部安装布置机器人交互设备的方法。
背景技术:
2.在家庭中,机器人具有广泛的应用场景,比如看家,儿童陪护等;同时,科技、信息技术快速发展,传统将硬件与机器人整合的方式使得机器人面临因信息科技技术落后而被淘汰的问题;将外置智能终端与机器人结合在一起,就可以在不对机器人进行过快淘汰的情况下,通过更换采用新技术的智能终端使机器人能够不断的升级自己的科技信息技术,从而大大延长自身的生命周期。
3.但是智能终端与机器人结合,通常选择在机器人上可以相对机器人身体运动的头部安装智能终端,这样可以使智能终端获得更好的工作效果;但这样的安装方式下用于安装固定智能终端的装置以及智能终端通常会占据机器人头部上众多交互设备(比如:传感器、照明灯、指示灯等)的安装位置,特别是对于小型机器人甚至会使得这些交互设备无法安装,导致机器人缺失许多重要功能;这里所述及的智能终端以手机为的典型代表。
技术实现要素:
4.为解决智能终端与交互设备安装位置冲突的矛盾,提出以下解决方案:智能终端通过专用设备(在后续文字中统称为头部智能终端安装平台)实现与机器人的头部的连接,如果以智能终端主屏幕所在的面为基准面,将智能终端在这个基准面投影所形成的平面区域称为遮挡区,基准面上除去遮挡区后的其余区域称为工作区,遮挡区以垂直于基准面的方式向基准面的两侧投影所覆盖的空间称为遮挡空间,工作区以垂直于基准面的方式向基准面的两侧投影所覆盖的空间称为工作空间。
5.在本技术文件中,将安装在机器人头部并与智能终端存在安装位置冲突的交互设备分为两类:必要交互设备,即需要与智能终端同时运行的交互设备;替代交互设备,即不需与智能终端同时运行的交互设备,当智能终端安装在机器人上后,替代交互设备就不需要运行了,而智能终端从机器人上取下来后,替代交互设备就需要进入运行状态。
6.为了确保必要交互设备能够在不受智能终端影响的情况下工作,将交互设备安装在工作空间内头部智能终端安装平台上不受智能终端遮挡影响的位置;而替代交互设备则安装在头部智能终端安装平台上智能终端安装位置后方的遮挡空间内。
7.进一步的,头部智能终端安装平台上安装有检测装置,用于检测智能终端是否安装在头部智能终端安装平台上;若智能终端确实安装在头部智能终端安装平台上时,则停止运行替代交互设备,若智能终端确实没有安装在头部智能终端安装平台上时,则启动运行替代交互设备,确保机器人在没有智能终端时也能正常运行。
附图说明
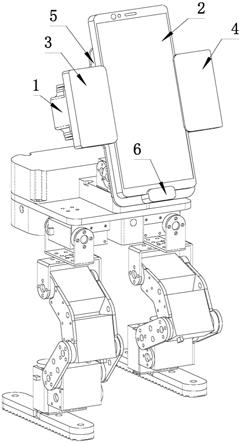
8.图1 为机器人的头部智能终端安装平台的结构示意图。
9.图2 为智能终端的示意图。
10.图3 为机器人的头部智能终端安装平台移除智能终端的示意图1。
11.图4 为机器人的头部智能终端安装平台移除智能终端的示意图2。
12.图5 为机器人的头部智能终端安装平台的侧向连接示意图。
13.图6 为机器人的头部智能终端安装平台中背部支架的示意图。
14.图7 为机器人的头部智能终端安装平台的部分爆炸连接示意图。
具体实施方式
15.下面结合附图详细举例说明本发明的实施方式, 本发明的实施例是为了对本发明进一步解释说明, 而非对本发明的保护范围限制。
16.一种机器人的头部智能终端安装平台位于机器人的头部1,由背部支架5、左侧设备舱3、右侧设备舱4与底部定位块6构成。
17.背部支架5、左侧设备舱3、右侧设备舱4与底部定位块6共同构成对智能终端2的安装固定装置。
18.图2为智能终端2的示意图,智能终端2的基本形态为扁平的六面体,以智能终端2主屏幕所在的面为智能终端2的前面,可以定义出2的前后方向,进而确定包括前后方面在内彼此正交的上下、左右方向,以及与智能终端2前后方向对应的智能终端2与智能终端2后背面,智能终端2上下方向对应的智能终端2上侧面与智能终端2下侧面,智能终端2左右方向对应的智能终端2左侧面与智能终端2右侧面。
19.智能终端2主屏幕所在的前面为基准面,则智能终端2在基准面上的投影区域就是遮挡区,基准面上除去遮挡区后的其余区域就是工作区;遮挡区以垂直于基准面的方式向基准面的两侧投影所覆盖的空间称为遮挡空间,工作区以垂直于基准面的方式向基准面的两侧投影所覆盖的空间称为工作空间。
20.背部支架5通过螺钉安装固定在机器人的头部1,背部支架5具有与智能终端2接触并定位智能终端2的定位结构-平面5a。
21.如图7所示,左侧设备舱3与右侧设备舱4连接在背部支架5上,左侧设备舱3与右侧设备舱4上有连接螺钉b1、b2、b3、b4的螺纹孔;螺钉b1穿过背部支架5上的槽口a1连接到左侧设备舱3,螺钉b2穿过背部支架5上的槽口a2连接到左侧设备舱3,螺钉b1与螺钉b2松开时,左侧设备舱3可以在背部支架5上滑动;右侧设备舱4与背部支架5的连接方式与右侧设备舱3与背部支架5的连接方式相同;当螺钉b1、b2、b3、b4没有拧紧时,可以调节左侧设备舱3与右侧设备舱4之间的距离。
22.底部定位块6通过螺钉安装固定在背部支架5下方。
23.左侧设备舱3与右侧设备舱4之间正对的面为各自内侧面。
24.机器人安装智能终端2时,将智能终端2的后背面与背部支架上的定位结构-平面5a贴合,以背部支架的定位结构-平面5a为智能终端2前后方向的定位基准;将智能终端的下侧面与底部定位块6的内侧面6a贴合,以底部定位块6的内侧面6a为智能终端2上下方向的定位基准,定位块6上有开孔用于通过智能终端2与机器人之间的连接电缆线,该开孔将
底部定位块6的内侧面6a分为两部分;将智能终端2放置到左侧设备舱3与右侧设备舱4两者的内侧面之间,随后调整左侧设备舱3与右侧设备舱4两者的内侧面之间的距离,直至智能终端2被左侧设备舱3与右侧设备舱4两者的内侧面夹紧后,拧紧连接左侧设备舱3与右侧设备舱4到背部支架5的螺钉b1、b2、b3、b4,完成智能终端2在机器人的头部智能终端安装平台上的固定。
25.当智能终端2安装在头部智能终端安装平台上时,头部智能终端安装平台所在的空间就可以以智能终端2为基准划分为遮挡空间和工作空间;其中背部支架5上位于智能终端2正后方的部分属于遮挡空间,可以安装替代交互设备,当智能终端2的后背面与背部支架上的定位结构-平面5a贴合时,替代交互设备被智能终端2所遮挡,处于非正常工作状态,当智能终端2被从背部支架5移开后,替代交互设备不再受到智能终端2的遮挡,进入正常工作状态;而左侧设备舱3与右侧设备舱4位于工作空间,在左侧设备舱3与右侧设备舱4安装必要交互设备,由于左侧设备舱3与右侧设备舱4不会受到智能终端2的遮挡,因此在左侧设备舱3与右侧设备舱4上安装的必要交互设备不会因为安装了智能终端2而无法正常工作。
26.当需要取下智能终端2时,只需拧松连接左侧设备舱3与右侧设备舱4到背部支架5的螺钉b1、b2、b3、b4,移动左侧设备舱3与右侧设备舱4使智能终端2脱离于左侧设备舱3与右侧设备舱4两者的内侧面的接触,即可从机器人的头部智能终端安装平台取下智能终端2。
27.进一步的,背部支架5上可以安装检测装置,用于检测智能终端2的后背面是否与背部支架5上的定位结构-平面5a贴合;若智能终端2的后背面确实与背部支架5上的定位结构-平面5a贴合,则停止运行替代交互设备,若智能终端2的后背面没有与背部支架5上的定位结构-平面5a贴合,则启动替代交互设备进入运行状态。
28.进一步的,左侧设备舱3的内侧面为一四边形平面,其中不与背部支架5接触的边线上有凸起的棱柱3b;左侧设备舱4的内侧面4a为一四边形平面,其中不与背部支架5接触的边线上有凸起的棱柱4b;底部定位块的内侧面6a由两个被分隔开的四边形平面构成,其中不与背部支架5接触的边线上有凸起的棱柱6b;当检测智能终端2被固定在机器人的头部智能终端安装平台上时,凸起的棱柱3b、4b、6b可以防止智能终端2从智能终端2的前面方向脱出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
