1.本发明涉及振荡电路以及传感器器件等。
背景技术:
2.在专利文献1中公开了考毕兹型的水晶振荡电路。该水晶振荡电路包括反相器、输出电阻、反馈电阻、水晶振子和一对电容器。反相器的输入节点连接于水晶振子的一端,输出电阻连接于反相器的输出节点与水晶振子的另一端之间,反馈电阻连接于反相器的输入节点与输出节点之间,一对电容器中的一方设置于水晶振子的一端与接地点之间,一对电容器中的另一方设置于水晶振子的另一端与接地点之间。
3.专利文献1:日本专利特开平6-125223号公报
4.在振荡电路的振荡中,有时会因振子的非线性产生不必要的振动,该不必要的振动会对振荡特性带来影响。通过进行低驱动振荡,能够降低不必要的振动,但在上述专利文献1等现有技术中,存在如下技术问题:即、未形成进行低驱动振荡的电路结构。
技术实现要素:
5.本公开的一方面涉及一种振荡电路,该振荡电路包括:驱动电路,振子输出信号从振子的一端输入所述驱动电路,所述驱动电路输出将所述振子输出信号反相后的驱动信号;以及限幅电路,设置于所述驱动电路的输出节点与所述振子的另一端之间,所述限幅电路向所述振子的所述另一端输出将所述驱动信号的振幅减小后的限幅驱动信号。
6.此外,本公开的另一方面涉及一种传感器器件,该传感器器件包括上述的振荡电路和所述振子。
附图说明
7.图1是振荡电路的结构例。
8.图2是频率偏移的温度特性。
9.图3是驱动电路的第一详细结构例。
10.图4是振荡电路中的信号波形例。
11.图5是驱动电路的第二详细结构例。
12.图6是驱动电路的第三详细结构例。
13.图7是驱动电路的第四详细结构例。
14.图8是输出电路的详细结构例。
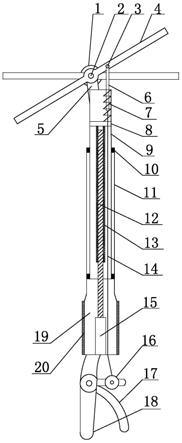
15.图9是双音叉型水晶振子的结构例。
16.图10是传感器器件的结构例。
17.附图标记说明:
18.10
…
振子;12
…
双音叉型水晶振子;14a、14b
…
振动部;16a、16b
…
基部;100
…
振荡电路;110
…
驱动电路;111
…
第一放大器电路;112
…
第二放大器电路;113
…
第三放大器电
路;115
…
选择器;117
…
偏置电路;120
…
限幅电路;130
…
输出电路;200
…
传感器器件;210
…
检测电路;c1
…
第一电容器;cc1
…
第一耦合电容器;cc2
…
第二耦合电容器;cfd1、cfd2、cfe2
…
反馈电容器;d1
…
第一二极管;d2
…
第二二极管;ia1
…
第一反相器;ia2
…
第二反相器;ia3
…
第三反相器;n1
…
第一节点;nidr输入节点;nqdr输出节点;opd1、opd2、ope2
…
运算放大器;qdr
…
驱动信号;qlm
…
限幅驱动信号;r1
…
第一电阻;r2
…
第二电阻;rfa1第一反馈电阻;rfa2第二反馈电阻;rfa3第三反馈电阻;rfd1、rfd2、rfe2
…
反馈电阻;ria1第一输入电阻;ria2第二输入电阻;xi
…
振子输入信号;xq
…
振子输出信号。
具体实施方式
19.以下,对本公开的优选实施方式进行详细说明。需要指出,以下说明的本实施方式并不是不当地限定权利要求书中所记载的内容,在本实施方式中说明的结构并非全部都是必须构成要件。
20.1.振荡电路
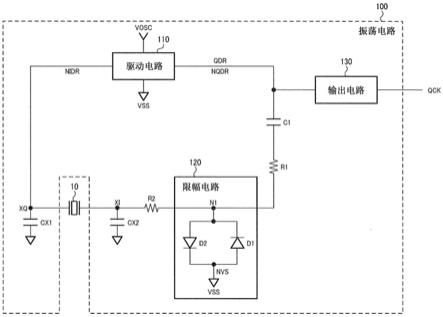
21.图1是本实施方式中的振荡电路100的结构例。振荡电路100包括驱动电路110、限幅电路120、输出电路130、第一电容器c1、第一电阻r1、第二电阻r2和电容器cx1、cx2。
22.振荡电路100通过驱动振子10而使振子10振荡。电容器cx1的一端连接于振子10的一端,电容器cx1的另一端连接于接地节点nvs。电容器cx2的一端连接于振子10的另一端,电容器cx2的另一端连接于接地节点nvs。向接地节点nvs供给接地电压vss。振荡电路100通过对从振子10的一端输入的振子输出信号xq进行反相放大而向振子10的另一端输出振子输入信号xi。即,振荡电路100是考毕兹型振荡电路。振荡电路100可以由分立的电路部件构成,也可以作为将电路元件集成在半导体基板上而得到的集成电路装置而构成。在振荡电路100是集成电路装置的情况下,电容器cx1、cx2等一部分电路元件也可以是集成电路装置的外设部件。
23.振子10是后面在图9中说明的双音叉型水晶振子。不过,振子10只要是在高驱动振荡中产生不必要的振动的振子即可。不必要的振动是指期望的振荡频率以外的频率下的振动。振子10并不限于水晶振子,也可以是陶瓷振子等压电振子,或者振子10并不限于双音叉型,也可以是各种各样的形状的振子。
24.从振子10的一端向驱动电路110输入振子输出信号xq。驱动电路110输出将振子输出信号xq反相而得的驱动信号qdr。限幅电路120设置于驱动电路110的输出节点nqdr与振子10的另一端之间。限幅电路120向振子10的另一端输出减小驱动信号qdr的振幅而得的限幅驱动信号qlm。
25.具体而言,驱动电路110的输入节点nidr连接于振子10的一端。振子输出信号xq是振子10对振荡电路100的驱动而输出的信号。驱动电路110通过对振子输出信号xq进行反相放大而输出相对于振子输出信号xq逆相位的驱动信号qdr。相对于驱动电路110的电源电压vosc,驱动信号qdr的振幅是vosc/2。限幅电路120使驱动信号qdr的振幅比vosc/2减小,输出限幅驱动信号qlm。例如,限幅驱动信号qlm的振幅在驱动信号qdr的振幅的一半以下。
26.根据本实施方式,通过设置限幅电路120而能够减小驱动振子10的信号的振幅。由此,能够降低因振子的非线性而产生的不必要的振动,并降低该不必要的振动对振荡特性所带来的影响。
27.在图2中,作为不必要的振动对振荡特性所带来的影响的一个例子,示出了频率偏移的温度特性。需要指出,在此图示出三阶温度特性,但温度特性根据振子的种类而不同,例如也可以是二阶温度特性。在图2中,特性nml示出理想的温度特性。如特性hdl所示,在因高驱动振荡而产生不必要的振动的情况下,温度特性因不必要的振动而不规则地偏离理想的特性nml。也将这样的偏离称为跳变。例如,在将振子10及振荡电路100用于传感器器件的情况下,温度特性的偏离影响物理量的检测精度。或者,在将振子10及振荡电路100用于tcxo等温度补偿型振荡器的情况下,由于无法补偿温度特性的跳变,因此温度补偿的精度下降。
28.在本实施方式中,通过进行低驱动振荡,能够使频率偏移的温度特性接近理想的特性nml。由此,例如能够提升传感器器件的检测精度,或者能够提升tcxo等中的温度补偿的精度。
29.需要指出,驱动电路110的增益设定得比不设置限幅电路120的现有的驱动电路的增益高。由此,在低驱动振荡中能够提高振荡的稳定性,或者在低驱动下也能够启动振荡电路100。后述驱动电路110的详细结构例。
30.接下来,对限幅电路120的详细结构例、第一电容器c1、第一电阻r1、第二电阻r2以及输出电路130进行说明。
31.限幅电路120包括第一二极管d1和第二二极管d2。第一二极管d1和第二二极管d2设置于第一节点n1与偏置节点之间。需要指出,在图1中,图示出偏置节点是接地节点nvs的示例,但偏置节点只要是被供给恒定电压的节点即可。第一二极管d1的正向是从第一节点n1朝向接地节点nvs的方向,第二二极管d2的正向是从接地节点nvs朝向第一节点n1的方向。即,第一二极管d1的阳极和第二二极管d2的阴极连接于第一节点n1,第一二极管d1的阴极和第二二极管d2的阳极连接于接地节点nvs。
32.将第一二极管d1和第二二极管d2的正向电压设为vf。根据本实施方式,仅在第一节点n1的电压以偏置节点的电压为中心在-vf以上且 vf以下时,第一二极管d1和第二二极管d2均截止。由此,由于第一节点n1的电压被限制为以偏置节点的电压为中心在-vf以上且 vf以下,因此第一节点n1的限幅驱动信号qlm的振幅被限制为vf。驱动电路110的电源电压vosc比2
×
vf大,驱动信号qdr的振幅比vf大,但如上所述第一二极管d1和第二二极管d2将限幅驱动信号qlm的振幅限制为vf。
33.如后面在图4中所说明的,被第一二极管d1和第二二极管d2限制了振幅的信号为矩形波。作为矩形波的限幅驱动信号qlm除了振荡频率的分量以外还包括各种各样的频率的分量。由此,由于在振荡电路100启动时振子10被积极地激励,因此即使在低驱动的状态下振荡电路100也稳定地启动。
34.第一电容器c1设置于驱动电路110的输出节点nqdr与第一节点n1之间,限幅电路120与第一节点n1连接。第一电阻r1设置于驱动电路110的输出节点nqdr与第一节点n1之间,并与第一电容器c1串联连接。即,串联连接的第一电容器c1和第一电阻r1的一端连接于输出节点nqdr,另一端连接于第一节点n1。在图1中,示出了第一电容器c1连接于输出节点nqdr侧的示例,但也可以使第一电阻r1连接于输出节点nqdr侧。第一电阻r1是限制流过限幅电路120的电流的用于限制电流的电阻。具体而言,第一电阻r1限制在第一二极管d1导通时流过第一二极管d1的电流以及在第二二极管d2导通时流过第二二极管d2的电流。
35.由于驱动电路110的电源电压是vosc,因此驱动信号qdr的中心电压为vosc/2。根据本实施方式,第一电容器c1对驱动信号qdr进行dc切割(cut),从而限幅电路120能够将限幅驱动信号qlm限制为以接地电压vss为中心的-vf以上且 vf以下的电压。此外,当超过驱动电路110的电流供给能力而电流流过限幅电路120时,驱动电路110有可能不正常进行动作。根据本实施方式,第一电阻r1对第一二极管d1或第二二极管d2导通时的电流进行限制,从而能够使得不超过驱动电路110的电流供给能力。
36.第二电阻r2设置于第一节点n1与振子10的另一端之间。即,第二电阻r2的一端连接于第一节点n1,另一端连接于振子10的另一端。限幅驱动信号qlm经由第二电阻r2而作为振子输入信号xi向振子10的另一端输入。第二电阻r2是用于使从振子10的另一端看第一节点n1时看起来是高阻抗的电阻。
37.由于在第一二极管d1或第二二极管d2导通时变为低阻抗,因此当振子10的另一端与第一节点n1直接连接时,基于振子10和电容器cx1、cx2的谐振电路的谐振频率会受到影响。根据本实施方式,通过第二电阻r2,在从振子10的另一端看第一节点n1时看起来是高阻抗,因此基于振子10和电容器cx1、cx2的谐振电路的谐振频率不会从限幅电路120受到影响。
38.输出电路130是从振荡信号生成时钟信号qck的电路。在本实施方式中,驱动信号qdr被用作振荡信号。输出电路130通过对驱动信号qdr进行缓冲而输出时钟信号qck。后面在图8中说明输出电路130的详细结构例。
39.2.第一详细结构例
40.图3是驱动电路110的第一详细结构例。驱动电路110包括第一放大器电路111、第二放大器电路112、第三放大器电路113、第一耦合电容器cc1和第二耦合电容器cc2。需要指出,对已经说明的结构要素标注同一附图标记,并适当省略关于该结构要素的说明。
41.向第一放大器电路111输入振子输出信号xq,向第二放大器电路112输入第一放大器电路111的输出信号qa1。第一耦合电容器cc1设置于第一放大器电路111的输出节点即第一放大器输出节点与第二放大器电路112的输入节点即第二放大器输入节点之间。即,第一放大器电路111的输入节点即第一放大器输入节点连接于驱动电路110的输入节点nidr,第一放大器输出节点连接于第一耦合电容器cc1的一端,第一耦合电容器cc1的另一端连接于第二放大器输入节点。
42.根据本实施方式,通过使驱动电路110包括两级以上的放大器电路,从而易于将振荡环路的增益设定为高增益。由此,在低驱动振荡中能够提高振荡的稳定性,或者在低驱动中也能够启动振荡电路100。此外,第一放大器电路111的输出信号qa1被第一耦合电容器cc1进行dc切割,并向第二放大器电路112输入。由此,由于切断输出信号qa1的dc漂移,因此在振荡环路的放大中不再受到dc漂移的影响。
43.需要指出,在第一详细结构例中,驱动电路110由三级放大器电路构成,但驱动电路110的级数并不限定于三级,只要驱动电路110整体上为反相放大电路即可。例如,如后述的第三详细结构例那样,驱动电路110也可以由两级放大器电路构成。或者,构成驱动电路110的放大器电路并不限定于两级以上,也可以由高增益的一级反相放大电路构成。
44.在第一详细结构例中,第一放大器电路111和第二放大器电路112为如下结构。即,第一放大器电路111包括第一反相器(inverter)ia1和第一反馈电阻rfa1。第一反馈电阻
rfa1设置于第一反相器ia1的输出节点即第一反相器输出节点与第一反相器ia1的输入节点即第一反相器输入节点之间。第二放大器电路112包括第二反相器ia2、第二反馈电阻rfa2和第一输入电阻ria1。第二反馈电阻rfa2设置于第二反相器ia2的输出节点即第二反相器输出节点与第二反相器ia2的输入节点即第二反相器输入节点之间。第一输入电阻ria1设置于第二放大器输入节点与第二反相器输入节点之间。
45.此外,在第一详细结构例中,驱动电路110包括第三放大器电路113和第二耦合电容器cc2。向第三放大器电路113输入第二放大器电路112的输出信号qa2。第二耦合电容器cc2设置于第二放大器电路112的输出节点即第二放大器输出节点与第三放大器电路113的输入节点即第三放大器输入节点之间。即,第二放大器输出节点连接于第二耦合电容器cc2的一端,第二耦合电容器cc2的另一端连接于第三放大器输入节点。第三放大器电路113的输出节点即第三放大器输出节点连接于驱动电路110的输出节点nqdr。
46.第三放大器电路113包括第三反相器ia3、第三反馈电阻rfa3和第二输入电阻ria2。第三反馈电阻rfa3设置于第三反相器ia3的输出节点即第三反相器输出节点与第三反相器ia3的输入节点即第三反相器输入节点之间。第二输入电阻ria2设置于第三放大器输入节点与第三反相器输入节点之间。
47.根据本实施方式,通过三级反相器构成驱动电路110,从而驱动电路110能够以高增益对振子输出信号xq进行反相放大。此外,由于设置有第一输入电阻ria1,从而能够通过第一输入电阻ria1与第二反馈电阻rfa2之比设定第二放大器电路112的增益。同样地,由于设置有第二输入电阻ria2,从而能够通过第二输入电阻ria2与第三反馈电阻rfa3之比设定第三放大器电路113的增益。由此,能够适当地设定设置有限幅电路120时所需的振荡环路的增益。
48.图4是图3的振荡电路100中的信号波形例。振子输出信号xq是将中心电压设为vosc/2的微小振幅的正弦波,其频率是振子10的振荡频率。
49.第一放大器电路111的输出信号qa1为振子输出信号xq反相放大后的信号。即,输出信号qa1的振幅比振子输出信号xq的振幅大,输出信号qa1是振子输出信号xq的逆相位。
50.第二放大器电路112的输出信号qa2为第一放大器电路111的输出信号qa1反相放大后的信号。即,输出信号qa2的振幅比输出信号qa1的振幅大,输出信号qa2是输出信号qa1的逆相位。需要指出,输出信号qa2为以电源电压vosc为上限、以接地电压vss为下限而被削波(clipper)的矩形波。
51.第三放大器电路113的输出信号qa3即驱动信号qdr为第二放大器电路112的输出信号qa2反相放大后的信号。由于输出信号qa2被削波,因此输出信号qa3与qa2的振幅相同,但输出信号qa3的电压变化更急剧。此外,输出信号qa3是输出信号qa2的逆相位。
52.限幅驱动信号qlm以接地电压vss=0v为中心被限制为振幅vf。即,限幅驱动信号qlm为以 vf为上限、以-vf为下限而被削波的矩形波。作为矩形波的限幅驱动信号qlm除了振荡频率的分量以外还包括各种各样的频率的分量。由此,由于在振荡电路100启动时振子10被积极地激励,因此即使在低驱动的状态下振荡电路100也被稳定地启动。
53.3.第二详细结构例
54.图5是驱动电路110的第二详细结构例。在第二详细结构例中,第二放大器电路112包括第二反相器ia2、第一输入电阻ria1、选择器115和电阻rfb1~rfb5。需要指出,对已经
说明的结构要素标注同一附图标记,并适当省略关于该结构要素的说明。
55.在第二详细结构例中,驱动电路110的增益是可变的。即,选择器115和电阻rfb1~rfb5构成可变电阻,该可变电阻成为第二反相器ia2的反馈电阻。电阻rfb1~rfb5串联连接在第二反相器输入节点与第二反相器输出节点之间。选择器115选择电阻间的节点中的任一节点,并将该选出的节点连接于第二反相器输出节点。通过选择哪个电阻间的节点来设定可变电阻的电阻值。
56.由于通过第一输入电阻ria1与可变电阻之比来设定第二放大器电路112的增益,因此第二放大器电路112的增益是可变的。由此,驱动电路110的增益为可变。振子10的ci值存在个体差异,但对于稳定的振荡或启动最佳的振荡环路的增益根据ci值而不同。根据本实施方式,由于驱动电路110的增益是可变的,因此能够根据ci值的个体差异设定适当的振荡环路的增益。ci是晶体阻抗(crystal impedance)的简称。
57.4.第三详细结构例
58.图6是驱动电路110的第三详细结构例。在第三详细结构例中,驱动电路110包括第一放大器电路111、第二放大器电路112、第一耦合电容器cc1和偏置电路117。
59.第一放大器电路111是使用运算放大器的正相(日语表述:正転)放大电路。第一放大器电路111包括运算放大器opd1、反馈电阻rfd1、反馈电容器cfd1、电阻rid1和电容器cid1。
60.反馈电阻rfd1和反馈电容器cfd1并联连接在运算放大器opd1的输出节点与反相输入节点之间。电阻rid1的一端连接于运算放大器opd1的反相输入节点,另一端连接于电容器cid1的一端。电容器cid1的另一端连接于接地节点nvs。运算放大器opd1的非反相输入节点连接于驱动电路110的输入节点nidr,经偏置电路117偏置后的振子输出信号xq被输入运算放大器opd1的非反相输入节点。运算放大器opd1的输出节点是第一放大器输出节点,连接于第一耦合电容器cc1的一端。
61.第二放大器电路112是使用运算放大器的反相放大电路。第二放大器电路112包括运算放大器opd2、反馈电阻rfd2、反馈电容器cfd2和输入电阻rid2。
62.输入电阻rid2的一端连接于第一耦合电容器cc1的另一端,另一端连接于运算放大器opd2的反相输入节点。反馈电阻rfd2和反馈电容器cfd2并联连接在运算放大器opd2的输出节点与反相输入节点之间。从偏置电路117向运算放大器opd2的非反相输入节点输入偏置电压。运算放大器opd2的输出节点是驱动电路110的输出节点nqdr,连接于第一电阻r1的一端。
63.偏置电路117从电源电压vosc生成vosc/2的偏置电压,并将该偏置电压向驱动电路110的输入节点nidr和运算放大器opd2的非反相输入节点供给。偏置电路117包括电阻rbd1、rbd2、rbd3和电容器cbd1。
64.电阻rbd1和rbd2串联连接在电源电压节点nvos与接地节点nvs之间。电源电压节点nvos是被供给电源电压vosc的节点。电容器cbd1与电阻rbd2并联连接。电阻rbd1与rbd2的电阻值相同,vosc/2的偏置电压被输出到电阻rbd1与rbd2之间的节点。电阻rbd1与rbd2之间的节点连接于运算放大器opd2的非反相输入节点。此外,电阻rbd1与rbd2之间的节点经由电阻rbd3而连接于驱动电路110的输入节点nidr。电阻rbd3为与第二电阻r2相同程度的高电阻,偏置电路117不会对基于振子10和电容器cx1、cx2的谐振频率带来影响。
65.在以上的本实施方式中,第一放大器电路111和第二放大器电路112中的至少一方包括运算放大器、设置于运算放大器的运算放大器输入节点与运算放大器输出节点之间的反馈电阻以及设置于运算放大器输入节点与运算放大器输出节点之间的反馈电容器。以第一放大器电路111为例,opd1是运算放大器,其反相输入节点是运算放大器输入节点,其输出节点是运算放大器输出节点,rfd1是反馈电阻,cfd1是反馈电容器。需要指出,在图6中,示出了第一放大器电路111和第二放大器电路112两者均包括运算放大器、反馈电阻和反馈电容器的示例,但只要第一放大器电路111和第二放大器电路112中的至少一方包括运算放大器、反馈电阻和反馈电容器即可。例如,如后面在图7中说明的第四详细结构例那样,第一放大器电路111也可以使用反相器构成。或者,在图6的第三详细结构例中,作为反相放大电路的第二放大器电路112也可以使用反相器构成。
66.根据本实施方式,由于驱动电路110包括使用运算放大器的放大器电路,从而易于确保在使用限幅电路120时所需的振荡环路的高增益。此外,由于运算放大器通过反馈电阻以及反馈电容器反馈,从而放大器电路作为低通滤波器发挥功能。低通滤波器的截止(cutoff)频率设定得比振荡电路100的振荡频率高,但被设定为尽可能低的频率,以便除去不需要的频率。由此,由于减少比振荡频率高的频率的分量,因而能够提升振荡特性。
67.5.第四详细结构例
68.图7是驱动电路110的第四详细结构例。在第四详细结构例中,第一放大器电路111由反相器构成,第二放大器电路112是正相放大电路。需要指出,对已经说明的结构要素标注同一附图标记,并适当省略关于该结构要素的说明。
69.与图3的第一详细结构例中的第一放大器电路111同样地,第一放大器电路111包括第一反相器ia1以及设置于第一反相器输出节点与第一反相器输入节点之间的第一反馈电阻rfa1。
70.第二放大器电路112包括运算放大器ope2、反馈电阻rfe2、反馈电容器cfe2、电阻rie2、电容器cie2和电阻rc1。
71.反馈电阻rfe2和反馈电容器cfe2并联连接在运算放大器ope2的输出节点与反相输入节点之间。电阻rie2的一端连接于运算放大器ope2的反相输入节点,另一端连接于电容器cie2的一端。电容器cie2的另一端连接于接地节点nvs。电阻rc1的一端连接于第一耦合电容器cc1的另一端,另一端连接于运算放大器ope2的非反相输入节点。向运算放大器ope2的非反相输入节点输入经偏置电路117偏置后的第一放大器电路111的输出信号qa1。运算放大器ope2的输出节点是驱动电路110的输出节点nqdr,连接于第一电阻r1的一端。
72.偏置电路117包括电阻rbd1、rbd2、rbe4和电容器cbd1。与图6的第三详细结构例同样地,通过电阻rbd1和rbd2生成vosc/2的偏置电压。电阻rbd1与rbd2之间的节点经由电阻rbe4而连接于运算放大器ope2的非反相输入节点。由此,向运算放大器ope2的非反相输入节点输入的信号的中心电压被偏置为vosc/2。
73.6.输出电路
74.图8是输出电路130的详细结构例。输出电路130包括比较器cpg、电容器cg1、cg2和电阻rg1~rg4。
75.电阻rg3和rg4串联连接在电源电压节点nvd与接地节点nvs之间。电源电压节点nvd是被供给电源电压vdd的节点。电源电压vdd可以与驱动电路110的电源电压vosc不同,
也可以相同。电容器cg2与电阻rg4并联连接。电阻rg3与rg4的电阻值相同,vdd/2的偏置电压被输出到电阻rg3与rg4之间的节点。
76.电容器cg1的一端连接于驱动电路110的输出节点nqdr,另一端连接于电阻rg1的一端。电阻rg1的另一端连接于比较器cpg的非反相输入节点。向比较器cpg的反相输入节点输入vdd/2的偏置电压。此外,向比较器cpg的非反相输入节点输入的信号的中心电压经由电阻rg2被偏置为vdd/2。由电容器cg1进行dc切割后的驱动信号qdr其中心电压被偏置为vdd/2,并向比较器cpg的非反相输入节点输入。比较器cpg对该信号与反相输入节点的vdd/2进行比较,从而输出时钟信号qck。
77.7.双音叉型水晶振子、传感器器件
78.在图9中,作为振子10的一例,示出了双音叉型水晶振子12的结构例。将相互正交的三个方向设为x、y、z。在此,将与使双音叉型水晶振子12的振荡频率变动的应力f平行(并行)的方向设为x方向。
79.双音叉型水晶振子12具有沿着x方向的两条振动部14a、14b。振动部14a、14b在y方向上并排配置,在非振动时相互平行。振动部14a、14b的一端共同连接于基部16a,另一端共同连接于基部16b。当双音叉型水晶振子12被振荡电路100驱动时,振动部14a、14b在与y方向平行的振动方向dvib上振动。振动部14a、14b以如下方式进行振动:在振动部14a向 y方向进行了位移时,振动部14b向-y方向位移,在振动部14a向-y方向进行了位移时,振动部14b向 y方向位移。
80.在将与z方向平行的应力f施加于双音叉型水晶振子12时,双音叉型水晶振子12的振荡频率根据该应力f发生变化。在施加有拉长双音叉型水晶振子12的方向的应力f时,振荡频率向高的方向发生变化,在施加有按压双音叉型水晶振子12的方向的应力f时,振荡频率向低的方向发生变化。通过预先构成为使得应力f根据加速度或压力等物理量而发生变化,从而振荡频率根据物理量而发生变化,通过检测该振荡频率而能够检测物理量。
81.双音叉型水晶振子12具有如下特点:与高驱动振荡时相比,在低驱动振荡中,不必要的振动大幅降低。本实施方式的振荡电路100由于能够使双音叉型水晶振子12进行低驱动振荡,因此能够降低双音叉型水晶振子12的不必要的振动。需要指出,如上述那样,可应用本实施方式的振荡电路100的振子10并不限定于双音叉型水晶振子12。
82.在图10中,示出了使用振荡电路100的传感器器件200的结构例。传感器器件200包括振荡电路100、振子10和检测电路210。
83.从振荡电路100向检测电路210输入时钟信号qck。检测电路210基于振子10的振荡频率的变化来检测物理量,并输出其检测出的物理量信息qsen。物理量信息qsen例如是与物理量的检测值对应的物理量数据。设想各种检测电路210的结构,作为一例,检测电路210是在规定期间中对时钟信号qck的时钟数进行计数、并将该计数值作为物理量信息qsen输出的计数器。规定期间例如是通过与时钟信号qck不同的基准时钟信号规定的期间。由于振荡频率根据物理量发生变化,从而由计数器测量的计数值也发生变化,因此能够通过计数值来检测物理量。
84.传感器器件200检测的物理量只要是使振子10受到应力的物理量即可。例如,物理量是加速度、重力加速度、水压、大气压或作用于物体的应力等。此外,传感器器件200也可以是对使振子10受到应力的物理量进行转换处理而得到的物理量。例如,也可以是,振子10
检测加速度,检测电路210对该加速度进行积分,从而将速度或位置作为物理量进行检测。
85.在以上的本实施方式中说明的振荡电路包括驱动电路和限幅电路。驱动电路从振子的一端被输入振子输出信号,并输出将振子输出信号反相后的驱动信号。限幅电路设置于驱动电路的输出节点与振子的另一端之间,向振子的另一端输出将驱动信号的振幅减小后的限幅驱动信号。
86.根据本实施方式,通过在驱动电路的输出节点与振子的另一端之间设置限幅电路,从而能够减小驱动振子的信号的振幅。由此,能够降低因振子的非线性而产生的不必要的振动,降低该不必要的振动对振荡特性带来的影响。
87.此外,本实施方式的振荡电路也可以包括第一电容器。第一电容器也可以设置于驱动电路的输出节点与第一节点之间,限幅电路与该第一节点连接。
88.根据本实施方式,由于第一电容器对驱动信号进行dc切割,从而限幅电路能够将限幅驱动信号限制为以任意的偏置电压为中心的规定振幅。
89.此外,在本实施方式中,限幅电路也可以包括第一二极管和第二二极管。第一二极管也可以设置于第一节点与偏置节点之间,以从第一节点朝向偏置节点的方向为正向。第二二极管也可以设置于第一节点与偏置节点之间,以从偏置节点朝向第一节点的方向为正向。
90.将第一二极管和第二二极管的正向电压设为vf。根据本实施方式,仅在第一节点的电压以偏置节点的电压为中心在-vf以上且 vf以下时,第一二极管和第二二极管均截止。由此,由于第一节点的电压被限制为以偏置节点的电压为中心在-vf以上且 vf以下,因此第一节点的限幅驱动信号的振幅被限制为vf。
91.此外,本实施方式的振荡电路也可以包括第一电阻。第一电阻也可以是设置于驱动电路的输出节点与第一节点之间并与第一电容器串联连接的用于限制电流的电阻。
92.当超过驱动电路的电流供给能力而电流流过限幅电路时,驱动电路有可能不正常进行动作。根据本实施方式,第一电阻对第一二极管或第二二极管导通时的电流进行限制,从而能够使得不超过驱动电路的电流供给能力。
93.此外,本实施方式的振荡电路也可以包括第二电阻。第二电阻也可以设置于第一节点与振子的另一端之间。
94.由于在第一二极管或第二二极管导通时变为低阻抗,因此当振子的另一端与第一节点直接连接时,基于振子的谐振电路的谐振频率会受到影响。根据本实施方式,通过第二电阻能够使从振子的另一端看第一节点时的阻抗为高阻抗。
95.此外,在本实施方式中,驱动电路也可以包括被输入振子输出信号的第一放大器电路、被输入第一放大器电路的输出信号的第二放大器电路以及设置于第一放大器电路的第一放大器输出节点与第二放大器电路的第二放大器输入节点之间的第一耦合电容器。
96.根据本实施方式,驱动电路包括两级以上的放大器电路,从而易于将振荡环路的增益设定为高增益。由此,在低驱动振荡中能够提高振荡的稳定性,或者在低驱动中也能够启动振荡电路。
97.此外,在本实施方式中,第一放大器电路也可以包括第一反相器以及设置于第一反相器的第一反相器输出节点与第一反相器输入节点之间的第一反馈电阻。第二放大器电路也可以包括第二反相器、设置于第二反相器的第二反相器输出节点与第二反相器输入节
点之间的第二反馈电阻以及设置于第二放大器输入节点与第二反相器输入节点之间的第一输入电阻。
98.根据本实施方式,由于能够通过两级以上的反相器构成驱动电路,因此比起通过一级反相器构成驱动电路的情况,能够使振荡环路为高增益。此外,由于设置有第一输入电阻,因而能够通过第一输入电阻与第二反馈电阻之比来设定第二放大器电路的增益。由此,能够适当设定设置有限幅电路时所需的振荡环路的增益。
99.此外,在本实施方式中,驱动电路也可以包括被输入第二放大器电路的输出信号的第三放大器电路以及设置于第二放大器电路的第二放大器输出节点与第三放大器电路的第三放大器输入节点之间的第二耦合电容器。第三放大器电路也可以包括第三反相器、设置于第三反相器的第三反相器输出节点与第三反相器输入节点之间的第三反馈电阻以及设置于第三放大器输入节点与第三反相器输入节点之间的第二输入电阻。
100.根据本实施方式,由于通过三级反相器构成驱动电路,从而驱动电路能够以高增益对振子输出信号进行反相放大。此外,由于设置有第二输入电阻,从而能够通过第二输入电阻与第三反馈电阻之比来设定第三放大器电路的增益。由此,能够适当设定设置有限幅电路时所需的振荡环路的增益。
101.此外,在本实施方式中,第一放大器电路以及第二放大器电路中的至少一方也可以包括运算放大器、设置于运算放大器的运算放大器输入节点与运算放大器输出节点之间的反馈电阻以及设置于运算放大器输入节点与运算放大器输出节点之间的反馈电容器。
102.根据本实施方式,由于驱动电路包括使用运算放大器的放大器电路,从而易于确保使用限幅电路时所需的振荡环路的高增益。此外,由于运算放大器通过反馈电阻以及反馈电容器反馈,从而放大器电路作为低通滤波器发挥功能。由此,由于减少比振荡频率高的频率的分量,因而能够提升振荡特性。
103.此外,本实施方式中,驱动电路的增益也可以是可变的。
104.振子的ci值存在个体差异,但对于稳定的振荡或启动最佳的振荡环路的增益根据ci值而不同。根据本实施方式,由于驱动电路的增益是可变的,因此能够根据ci值的个体差异设定适当的振荡环路的增益。
105.此外,在本实施方式中,振子也可以是双音叉型水晶振子。
106.双音叉型水晶振子具有如下特点:与高驱动振荡时相比,在低驱动振荡中,不必要的振动大幅降低。由于本实施方式的振荡电路能够使双音叉型水晶振子进行低驱动振荡,因此能够降低双音叉型水晶振子的不必要的振动。
107.此外,本实施方式的传感器器件包括上述任一项所述的振荡电路和振子。
108.此外,本实施方式的传感器器件也可以包括基于振子的振荡频率的变化检测物理量的检测电路。
109.需要指出,如上所述对本实施方式进行了详细说明,本领域技术人员应当能够容易理解,可进行实质上未脱离本公开的新事项以及效果的多种变形。因此,这样的变形例全部包括在本发明的范围内。例如,在说明书或附图中,至少一次与更广义或同义的不同用语一同记载的用语在说明书或附图的任何部位都可以置换为该不同的用语。此外,本实施方式以及变形例的全部组合也包括于本发明的范围内。此外,振荡电路、振子以及传感器器件的结构以及动作等也并不限定于本实施方式中说明的内容,可进行各种变形实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。