1.本技术涉及医疗康复技术领域,尤其涉及一种适用于外骨骼吊架的自动校 正控制方法和相关设备。
背景技术:
2.智能康复设备,尤其是智慧医疗领域的热点之一。目前,智能康复设备已 经成为重要的辅助医疗设备,被广泛地应用到康复护理和康复治疗等领域。
3.对于神经损伤患者,运动损伤患者,骨科术后等患者的康复阶段,康复吊 架作为康复辅助是逐步成为更受欢迎的辅助工具,具体的,患者通过使用康复 吊架可以进行行走、平衡等功能恢复训练,帮助患者逐渐恢复肌力,掌握身体 平衡,逐步恢复正常行走步态。
4.针对现有的康复吊架,其可以根据对于不同损伤程度的患者进行分阶段地 吊架跟随恢复,参考已公开专利cn202022604048.7-一种无源跟随吊架,可完 成部分针对患者步态和行走功能的恢复。患者在使用康复吊架的外骨骼进行步 态训练时,需要有行走功能逐步恢复的过程,在走直线甚至转弯时,会发生一 定程度的偏移,而现有的康复吊架需要辅助者人为地判断偏移情况并及时进行 回正干预,难以满足不同患者不同时期的运动需求,且无法实现患者恢复阶段 的精细化干预。
技术实现要素:
5.本技术实施例提供适用于外骨骼吊架的自动校正控制方法和相关设备,实 现不同患者不同时期的运动需求和恢复阶段进行精细化干预的技术目的。
6.一种适用于外骨骼吊架的自动校正控制方法,用于供患者进行行走训练的 跟随康复吊架,该方法包括:
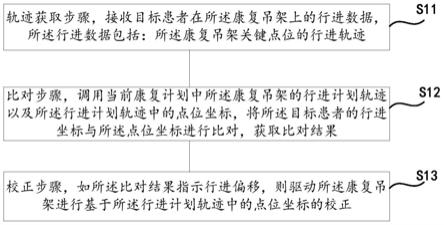
7.轨迹获取步骤,接收目标患者在所述康复吊架上的行进数据,所述行进数 据包括:所述康复吊架关键点位的行进轨迹;
8.比对步骤,调用当前康复计划中所述康复吊架的行进计划轨迹以及所述行 进计划轨迹中的点位坐标,将所述目标患者的行进坐标与所述点位坐标进行比 对,获取比对结果;
9.校正步骤,如所述比对结果指示行进偏移,则驱动所述康复吊架进行基于 所述行进计划轨迹中的点位坐标的校正。
10.优选地,本方法还包括:创建康复吊架关键点位的行进轨迹预警地图,包 括:
11.获取所述目标患者发出的步行空间指令中的康复计划参数,所述康复计划 参数携带有所述康复吊架的计划行进轨迹;
12.以所述步行空间为准构建计划行进轨迹坐标轴;
13.绘制各个关键点位在所述计划行进轨迹的预警点,所述预警点包括拐弯预 警点;
14.生成所述康复吊架关键点位的行进轨迹预警地图。
15.优选地,所述康复吊架关键点位包括但不限于:升降支架,行走底座或轮 毂式麦克纳姆轮。
16.优选地,所述康复吊架关键点位的点位坐标为二维空间坐标;
17.所述行进轨迹预警地图为二维空间地图。
18.优选地,基于康复计划参数具体为:所述康复吊架辅助直行、左移、右移、 左转、右转、加速、降速的运动方式。
19.优选地,接收目标患者在所述康复吊架上的行进数据,具体实现为:
20.利用装设于所述康复吊架的定位传感器获取所述康复吊架关键点位的当 前行进坐标,并与所述行进计划轨迹中的预警点进行实时匹配;
21.如当前行进坐标到达预警点时,驱动所述康复吊架进行自主坐标校正。
22.一种适用于外骨骼吊架的自动校正控制装置,包括:
23.轨迹获取模块,接收目标患者在所述康复吊架上的行进数据,所述行进数 据包括:所述康复吊架关键点位的行进轨迹;
24.比对模块,调用当前康复计划中所述康复吊架的行进计划轨迹以及所述行 进计划轨迹中的点位坐标,将所述目标患者的行进坐标与所述点位坐标进行比 对,获取比对结果;
25.校正模块,如所述比对结果指示行进偏移,则驱动所述康复吊架进行基于 所述行进计划轨迹中的点位坐标的校正。
26.优选地,本装置还包括预警地图创建模块,配置为:
27.获取所述目标患者发出的步行空间指令中的康复计划参数,所述康复计划 参数携带有所述康复吊架的计划行进轨迹;
28.以所述步行空间为准构建计划行进轨迹坐标轴;
29.绘制各个关键点位在所述计划行进轨迹的预警点,所述预警点包括拐弯预 警点;
30.生成所述康复吊架关键点位的行进轨迹预警地图。
31.一种适用于外骨骼吊架的自动校正控制设备,用于供患者进行行走训练的 跟随康复吊架,包括:
32.至少一个处理器;以及
33.与所述至少一个处理器通信连接的存储器;其中,
34.所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述 至少一个处理器执行,以使所述至少一个处理器能够执行如上所述的方法。
35.一种用于康复吊架,包括:如上所述的适用于外骨骼吊架的自动校正控制 装置。
36.本发明的适用于外骨骼吊架的自动校正控制方法,轨迹获取步骤,接收目 标患者在所述康复吊架上的行进数据,比对步骤,将所述目标患者的行进坐标 与所述点位坐标进行比对,获取比对结果;校正步骤,驱动所述康复吊架进行 基于所述行进计划轨迹中的点位坐标的校正。本发明利用针对康复吊架上的行 进数据,利用轨迹比对和点位坐标比对,对患者无法完全达到的行走功能进行 实时干预和校正,控制康复吊架发生偏移时进行校正,且在预设的预警点进行 坐标偏移预判和主动干预,相比于现有技术中的人工干预和康复吊架无法主动 干预的技术缺陷,达到了不同患者不同时期的运动需求和恢复阶段进行精细化 校正的技术目的。
附图说明
37.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分, 本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限 定。在附图中:
38.图1为本技术实施例中的适用于外骨骼吊架的自动校正控制方法的流程示 意图;
39.图2为本技术实施例中的适用于外骨骼吊架的自动校正控制方法的流程示 意图;
40.图3为本技术实施例中的适用于外骨骼吊架的自动校正控制方法的流程示 意图;
41.图4为本技术实施例中的适用于外骨骼吊架的自动校正控制装置的示意图;
42.图5为本技术实施例中的适用于外骨骼吊架的自动校正控制方法的康复吊 架示意图;
43.图6为本技术实施例中的基于本技术实施方式的控制设备的结构示意图。
具体实施方式
44.本技术实施例中提供一种适用于外骨骼吊架的自动校正控制方法和相关 设备,实现不同患者不同时期的运动需求和恢复阶段进行精细化跟踪的技术目 的。
45.下面结合参照附图1对本技术实施例提供的适用于外骨骼吊架的自动校正 控制方法作进一步说明,
46.一种适用于外骨骼吊架的自动校正控制方法,用于供患者进行行走训练的 跟随康复吊架,该方法包括:
47.需要说明的是,所述康复吊架主要指的是步行跟随康复训练吊架,其包括 升降支架,行走底座和悬臂吊环,行走底座上设置有轮组部,进一步地,为了 实现减重,配置减重束缚带,利用设置吊架上方设置的传感器确认目标患者进 入吊架减重区域。通过控制轮毂式麦克纳姆轮,实现步行跟随康复训练设备自 动跟随使用者运动趋势的目的。
48.s11:轨迹获取步骤,接收目标患者在所述康复吊架上的行进数据,所述行 进数据包括:所述康复吊架关键点位的行进轨迹;
49.目标患者在所述康复吊架上进行恢复训练,主要是通过所述康复吊架带动 并与目标患者的自主练习配合,在不同的康复模式或不同阶段,可为患者匹配 不同的行进路线,对应所述康复吊架同时行进。
50.康复吊架在某康复模式下,如10米无转弯的直行恢复中,所述康复吊架 的行进计划轨迹为吊架起始位置起得10米训练路径。对于康复吊架的位置, 可以通过几个关键点位实现,并可安装定位传感器或者视觉设备实现。所述康 复吊架关键点位包括但不限于:升降支架,行走底座或轮毂式麦克纳姆轮。
51.s12:比对步骤,调用当前康复计划中所述康复吊架的行进计划轨迹以及所 述行进计划轨迹中的点位坐标,将所述目标患者的行进坐标与所述点位坐标进 行比对,获取比对结果;
52.所述行进计划轨迹可根据实际设置分为多种,包括直行、拐弯或组合。在 行进轨迹中,目标患者不断迈步到达各个点位坐标。所述点位坐标可进行实时 获取得到二维的点位坐标矩阵,或者,在已设定的康复轨道上生成点位坐标值。 所述目标患者的行进位置代表康复吊架的位置,举例说明,如发生目标患者在 超过2米的距离内,多次比对行进坐标与点位坐标不符。则可以判定行走偏移 的情况。
53.s13:校正步骤,如所述比对结果指示行进偏移,则驱动所述康复吊架进行 基于所述行进计划轨迹中的点位坐标的校正。
54.所述康复吊架的控制设备在接收到所述目标患者行走偏移信号时,所述康 复吊架按照行进计划轨迹中的标准点位坐标进行带动患者进入到正常的行进 道路上,此时所述康复吊架发挥辅助恢复的效能,所述目标患者接受被动引导 行走。从而通过本发明的控制方法,可帮助目标患者进行计划恢复的同时定向 干预和精细化辅助,不仅提升恢复效果,并且实现定制化。
55.参考图2,本发明还披露了创建康复吊架关键点位的行进轨迹预警地图的 方法,包括:
56.s21:获取所述目标患者发出的步行空间指令中的康复计划参数,所述康复 计划参数携带有所述康复吊架的计划行进轨迹;
57.优选地,基于康复计划参数具体为:所述康复吊架辅助直行、左移、右移、 左转、右转、加速、降速的运动方式。
58.在图1对应实施例的基础上,为了能够更为全面而精准地进行辅助的康复, 在目标患者发出针对某个训练空间的康复指令时,如:在有直道、弯道排布的 训练空间中,完成两个左转其余直行的共15米的短训练计划。
59.s22:以所述步行空间为准构建计划行进轨迹坐标轴;
60.在该步行空间中构建二维坐标轴,原点可根据康复所在空间选取。在该空 间中,所述康复吊架的关键点位可以是升降支架,行走底座或轮毂式麦克纳姆 轮的一个或多个点位的组合。两个左转其余直行的共15米的短训练计划中, 以行走底座作为关键点位,将形成其行进轨迹,所述行进轨迹是由关键点位的 坐标组形成的,所述坐标可以是经纬度和离地高度组合而成,并不局限。
61.s23:绘制各个关键点位在所述计划行进轨迹的预警点,所述预警点包括拐 弯预警点;
62.对于预警点的选取,可以根据实际的计划行进轨迹按照固定的间隔或者高 难度完成点位等设定,也可以根据用户的历史训练情况设定,比如:用户上一 次在该短训练计划中,在第二次左转时发生较为严重的偏移。那么在本次的预 警点绘制过程中,第二次左拐处可增加2-3个预警点,利用所述预警点,可辅 助该患者提前意识到可能发生偏移,并可配合患者的尽可能地避免偏移。
63.s24:生成所述康复吊架关键点位的行进轨迹预警地图。
64.可选地,所述康复吊架关键点位的点位坐标为二维空间坐标;所述行进轨 迹预警地图为二维空间地图。所述二维空间地图可通过本地计算机通过预警点 选取,或者通过远程服务器根据预警点绘制算法,所述康复吊架关键点位作为 物联网中的一个节点进行远程地数据获取,并可参与所述预警点绘制算法的训 练和机器学习,针对该康复吊架构建预警点绘制基于该患者训练的行进轨迹预 警地图。
65.参考图3,接收目标患者在所述康复吊架上的行进数据,具体实现为:
66.s31:利用装设于所述康复吊架的定位传感器获取所述康复吊架关键点位 的当前行进坐标,与所述行进计划轨迹中的预警点进行实时匹配;
67.在行进轨迹预警地图构建完成的情况下,本实施例列举了如何利用所述行 进轨
迹预警地图,所述康复吊架主动针对预警点进行实时地行进校正预判和提 醒。当所述目标患者确实发生较为严重的偏移。所述行进偏移的判断可以根据 多个关键点位的位置偏移综合判断,也可以利用单个关键点位的空间坐标发生 超出30%等阈值判断,并不做限制。
68.s32:如当前行进坐标到达预警点时,驱动所述康复吊架进行自主坐标校正。
69.在本发明中的预警点优选在拐弯,即:步行左转、右转的位置进行配置, 也可在较为重要的恢复节点如五十米、百米等位置配置。并不局限。
70.通过驱动所述康复吊架进行自主坐标校正,以实现患者在步态训练轨迹不 发生总体偏差。
71.图4示出了一种适用于外骨骼吊架的自动校正控制装置,包括:
72.轨迹获取模块41,接收目标患者在所述康复吊架上的行进数据,所述行进 数据包括:所述康复吊架关键点位的行进轨迹;
73.比对模块42,调用当前康复计划中所述康复吊架的行进计划轨迹以及所述 行进计划轨迹中的点位坐标,将所述目标患者的行进坐标与所述点位坐标进行 比对,获取比对结果;
74.校正模块43,如所述比对结果指示行进偏移,则驱动所述康复吊架进行基 于所述行进计划轨迹中的点位坐标的校正。
75.以及,本装置还包括预警地图创建模块44,配置为:
76.获取所述目标患者发出的步行空间指令中的康复计划参数,所述康复计划 参数携带有所述康复吊架的计划行进轨迹;
77.以所述步行空间为准构建计划行进轨迹坐标轴;
78.绘制各个关键点位在所述计划行进轨迹的预警点,所述预警点包括拐弯预 警点;
79.生成所述康复吊架关键点位的行进轨迹预警地图。
80.具体的工作原理和处理过程参考图1-3的图示及其对应说明,此处不再赘 述。
81.参考图5,示出了一种智能康复吊架的示意图,该康复吊架可配合压力传 感器判断患者是否处于减重区域,配合适用于外骨骼吊架的自动校正控制设备 进行自动校正和主动校正,完成对患者的运动恢复辅助功能。
82.下面参照图6来描述根据本技术的这种实施方式的一种适用于外骨骼吊架 的自动校正控制设备,用于供患者进行行走训练的跟随康复吊架,其作为适用 于外骨骼吊架的自动校正的主控机构对所述康复吊架的校正过程进行计算和 机械控制;
83.所述控制主机60可作为计算板或者芯片式控制机构直接安装于康复吊架, 配合所述传感设备系统、电机模组及减重协同,形成智能康复吊架。
84.图6示出的是匹配康复控制方法的计算设备,即可配置于所述适用于外骨 骼吊架的自动校正设备的控制主机60,所述控制主机60包括:
85.需要说明的是,图6显示的控制主机60仅仅是一个示例,不应对本技术 实施例的功能和使用范围带来任何限制。
86.如图6所示,控制主机60以通用控制主机的形式表现。控制主机60的组 件可以包括但不限于:上述至少一个处理器61、上述至少一个存储器62、连 接不同系统组件(包括存储器62和处理器61)的总线63。
87.总线63表示几类总线结构中的一种或多种,包括存储器总线或者存储器 控制器、
外围总线、处理器或者使用多种总线结构中的任意总线结构的局域总 线。
88.存储器62可以包括易失性存储器形式的可读介质,例如随机存取存储器 (ram)621和/或高速缓存存储器622,还可以进一步包括只读存储器(rom) 623。
89.存储器62还可以包括具有一组(至少一个)程序模块624的程序/实用工 具625,这样的程序模块624包括但不限于:操作系统、一个或者多个应用程 序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括 网络环境的实现。
90.控制主机60也可以与一个或多个外部设备64(例如键盘、指向设备等) 通信,还可与一个或者多个使得用户能与控制主机60交互的设备通信,和/或 与使得该控制主机60能与一个或多个其它控制主机进行通信的任何设备(例 如路由器、调制解调器等等)通信。这种通信可以通过输入/输出(i/o)接口 65进行。并且,控制主机60还可以通过网络适配器66与一个或者多个网络(例 如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通信。如图 所示,网络适配器66通过总线63与用于控制主机60的其它模块通信。应当 理解,尽管图中未示出,可以结合控制主机60使用其它硬件和/或软件模块, 包括但不限于:微代码、设备驱动器、冗余处理器、外部磁盘驱动阵列、rai d 系统、磁带驱动器以及数据备份存储系统等。
91.综上所述:
92.本发明的适用于外骨骼吊架的自动校正控制方法,轨迹获取步骤,接收目 标患者在所述康复吊架上的行进数据,比对步骤,将所述目标患者的行进坐标 与所述点位坐标进行比对,获取比对结果;校正步骤,驱动所述康复吊架进行 基于所述行进计划轨迹中的点位坐标的校正。本发明利用针对康复吊架上的行 进数据,利用轨迹比对和点位坐标比对,对患者无法完全达到的行走功能进行 实时干预和校正,控制康复吊架发生偏移时进行校正,且在预设的预警点进行 坐标偏移预判和主动干预,相比于现有技术中的人工干预和康复吊架无法主动 干预的技术缺陷,达到了不同患者不同时期的运动需求和恢复阶段进行精细化 校正的技术目的
93.在一些可能的实施方式中,本技术提供的适用于外骨骼吊架的自动校正控 制方法的各个方面还可以实现为一种程序产品的形式,其包括程序代码,当程 序产品在计算机设备上运行时,程序代码用于使计算机设备执行本说明书上述 描述的根据本技术各种示例性实施方式的待验证信息的加密方法和/或待验证 信息的验证方法中的步骤,例如,计算机设备可以执行如图1中所示的步骤 s11-s13。
94.在一些可能的实施方式中,根据本技术的控制主机可以至少包括至少一个 处理器、以及至少一个存储器(如第一服务器)。其中,存储器存储有程序代 码,当程序代码被处理器执行时,使得处理器执行本说明书上述描述的根据本 申请各种示例性实施方式的系统权限开启方法中的步骤。
95.程序产品可以采用一个或多个可读介质的任意组合。可读介质可以是可读 信号介质或者可读存储介质。可读存储介质例如可以是——但不限于——电、 磁、光、电磁、红外线、或半导体的系统、控制装置或器件,或者任意以上的 组合。可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个 导线的电连接、便携式盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、 可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑盘只读存储器 (cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。
96.本技术的实施方式的用于系统权限开启的程序产品可以采用便携式紧凑 盘只读存储器(cd-rom)并包括程序代码,并可以在控制主机上运行。然而,本 申请的程序产品不限于此,在本文件中,可读存储介质可以是任何包含或存储 程序的有形介质,该程序可以被指令执行系统、控制装置或者器件使用或者与 其结合使用。
97.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产 品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和 /或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/ 或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入 式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算 机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一 个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
98.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设 备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中 的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个 流程和/或方框图一个方框或多个方框中指定的功能。
99.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使 得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处 理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个 流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
100.尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基 本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要 求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
101.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本申 请的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及 其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。