1.本发明是有关一种马达控制系统及其控制方法,特别涉及一种具有制动功能的马达控制系统及其控制方法。
背景技术:
2.现今由马达带动位移的马达控制系统(例如电梯),通常其停电制动技术是利用一个或多个电磁闸控制。当市电断电时,由弹簧将马达轴承咬紧,以避免所带动的皮带或缆绳滑动。要启动时则将电磁闸通电而放开夹具,以让马达能够运行。亦即电磁作动即使马达控制系统运行,弹簧复归则使马达控制系统停机。
3.此设计可以确保停电时,马达被锁住而避免滑动。但是在某些马达控制系统中(例如但不限于,跑步机、电扶梯等)的应用中,通常会允许在断电时,跑带些微滑动(需有阻力),以避免有人受困时,跑带被咬紧而无法自行脱困。因此使用于电梯的马达控制系统的电路架构及控制方式并不适用于跑步机、电扶梯等设备。而且,使用于电梯的马达控制系统的机械制动装置需要定期维护,如此势必会增加使用者负担。更重要的是,通常其机械制动装置成本较高,且需在狭小跑步机控制箱内安装,使其无法降低建构成本及缩小化。
4.所以,如何设计出一种马达控制系统及其控制方法,以取代机械制动装置的机械夹止的制动方式,乃为本公开发明人所欲行研究的一大课题。
技术实现要素:
5.为了解决上述问题,本发明是提供一种马达控制系统,以克服现有技术的问题。马达控制系统耦接输入电源及马达,且马达控制系统包括变频器、制动器及控制器。变频器包括多个上桥晶体管及多个下桥晶体管,其中每一上桥晶体管的一端点耦接输入电源的高电压电平,且每一上桥晶体管的另一端点分别对应地耦接每一下桥晶体管的一端点,以及每一下桥晶体管的另一端点耦接输入电源的低电压电平。制动器包括多个回路开关,其中每一回路开关包括第一端点、第二端点及第三端点,每一回路开关的第三端点分别对应地耦接每一下桥晶体管的控制端,且每一回路开关的第三端点选择性地耦接于第一端点或第二端点。以及控制器,耦接每一上桥晶体管的控制端、每一回路开关的第一端点。当控制器检测输入电源大于低电压保护值时,控制器控制每一回路开关的第三端点耦接第一端点,且控制器提供上桥驱动信号组操作每一上桥晶体管,以及提供下桥驱动信号组操作每一下桥晶体管,以驱动马达。
6.为了解决上述问题,本发明提供一种马达控制方法,以克服现有技术的问题。马达控制方法用于马达控制系统,马达控制系统耦接输入电源及马达,且马达控制系统包括制动器及变频器。变频器包括多个上桥晶体管及多个下桥晶体管,且每一上桥晶体管耦接输入电源的高电压电平及分别对应地耦接每一下桥晶体管,且每一下桥晶体管还耦接输入电源的低电压电平。制动器包括驱动回路及制动回路,且驱动回路及制动回路连接每一下桥晶体管。马达控制方法包括判断输入电源是否低于低电压保护值。及当输入电源大于低电
压保护值,则导通驱动回路且截止制动回路。当驱动回路被导通时,提供上桥驱动信号组操作每一上桥晶体管,且经由驱动回路提供下桥驱动信号组操作每一下桥晶体管,以驱动马达。
7.本发明的主要目的及技术效果在于,利用永磁马达特性,搭配制动器产生制动力道,以达到取代机械制动煞车装置,降低维护成本,增加机构设计弹性的技术效果。
8.为了能更进一步了解本发明为实现预定目的所采取的技术、手段及技术效果,请参阅以下有关本发明的详细说明与附图,相信本发明的目的、特征与特点,当可由此得一深入且具体的了解,然而附图仅提供参考与说明用,并非用来对本发明加以限制者。
附图说明
9.图1为本发明具有制动功能的马达控制系统方框示意图;
10.图2a为本发明具有制动功能的马达控制系统第一实施例方框示意图;
11.图2b为本发明具有制动功能的马达控制系统第二实施例方框示意图;
12.图2c为本发明具有制动功能的马达控制系统第三实施例方框示意图;
13.图3a为本发明具有制动功能的马达控制方法第一实施例的方法流程图;
14.图3b为本发明具有制动功能的马达控制方法第一实施例的方法流程图(续);
15.图4a为本发明具有制动功能的马达控制方法第二实施例的方法流程图;及
16.图4b为本发明具有制动功能的马达控制方法第二实施例的方法流程图(续)。
17.附图标记说明:
[0018]1…
马达控制系统
[0019]
10
…
整流器
[0020]
20
…
变频器
[0021]
su
…
上桥晶体管
[0022]
sl
…
下桥晶体管
[0023]
30
…
制动器
[0024]
32
…
回路开关
[0025]
34
…
电池
[0026]
36
…
制动开关
[0027]
38
…
电池开关
[0028]a…
第一端点
[0029]b…
第二端点
[0030]c…
第三端点
[0031]
40
…
控制器
[0032]
42
…
电源供应器
[0033]
44
…
驱动电路
[0034]
100
…
马达
[0035]
200
…
负载
[0036]
vac
…
交流电源
[0037]
vin
…
输入电源
[0038]
vin
…
高电压电平
[0039]
vin
‑…
低电压电平
[0040]
vo
…
输出电源
[0041]
vb
…
电池电力
[0042]
p
…
电力
[0043]
sug
…
上桥驱动信号组
[0044]
slg
…
下桥驱动信号组
[0045]
s1~s6
…
信号
[0046]
sc
…
控制信号
[0047]
slb
…
下桥制动信号
[0048]
ce
…
急停命令
[0049]
cr
…
复归命令
[0050]
(s100)~(s740)
…
步骤
具体实施方式
[0051]
兹有关本发明的技术内容及详细说明,配合附图说明如下:
[0052]
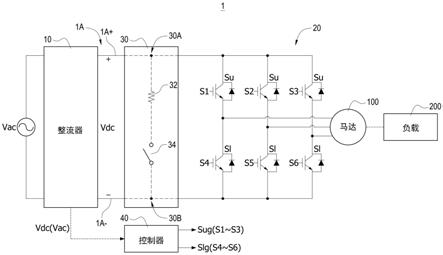
请参阅图1为本发明具有制动功能的马达控制系统方框示意图。马达控制系统1接收交流电源vac,且驱动马达100运转,以使马达100带动负载200(例如但不限于跑步机的皮带)。马达控制系统1包括整流器10、变频器20、制动器30及控制器40。整流器10将交流电源vac整流为直流的输入电源vin。变频器20耦接整流器10,且接收输入电源vin。控制器40耦接变频器20,且根据马达控制系统1的反馈(输出反馈或输入反馈)提供上桥驱动信号组sug与下桥驱动信号组slg(脉宽调制信号)控制变频器20切换输入电源vin,来产生三相电流以驱动马达100运转。
[0053]
具体而言,变频器20包括多个上桥晶体管su及多个下桥晶体管sl。每个上桥晶体管su与对应的下桥晶体管sl构成一组开关桥臂,且每个开关桥臂彼此间为并联耦接的电路结构。开关桥臂的数量可根据马达100的需求而定,例如但不限于可使用三组开关桥臂进行三相马达的控制。其中,上桥驱动信号组sug(例如包括信号s1~s3)与下桥驱动信号组slg(例如包括信号s4~s6)的信号数量分别对应上桥晶体管su与下桥晶体管sl的数量。每一上桥晶体管su的一端点耦接输入电源vin的高电压电平vin ,且每一上桥晶体管su的另一端点分别对应地耦接每一下桥晶体管sl的一端点。每一下桥晶体管sl的另一端点耦接输入电源vin的低电压电平vin-,且马达100的每一相分别耦接其中一组开关桥臂的上桥晶体管su与下桥晶体管sl之间的节点。控制器40分别耦接每一上桥晶体管su的控制端,且提供上桥驱动信号组sug操作上桥晶体管su的导通与截止。
[0054]
制动器30耦接每一下桥驱动信号组slg的控制端与控制器40之间,且控制器40根据输入电源vin的状况而控制制动器30产生驱动回路或制动回路。当控制器40检测输入电源vin正常时,控制器40控制制动器30产生驱动回路,使控制器40所提供的下桥驱动信号组slg能够通过制动器30对应地提供至每一下桥晶体管sl,以控制变频器20驱动马达100运转。当控制器40检测输入电源vin异常时,控制器40控制制动器30产生制动回路,使控制器40所提供的下桥驱动信号组slg无法通过制动器30提供至下桥晶体管sl。此时,控制器40通
过制动回路对下桥晶体管sl进行马达100的制动控制,以控制马达100停转。值得一提,于本发明的一实施例中,输入电源vin的检测可通过直接检测整流器10的输出端而获得,亦或者是通过检测交流电源vac等方式而获得,控制器40也是通过耦接交流电源vac或输入电源vin而获得运行时的电力来源,在此以虚线表示其来源可以依实际需求而改变检测节点与电力来源。
[0055]
进一步而言,马达100可以为永磁马达。当控制器40通过制动回路对下桥晶体管sl进行马达100的制动控制时,马达100会产生反电动势反馈至变频器20。若此反电动势若是无法泄放,会造成马达100不受控制的转动,并危害到跑步机的使用者,也会造成马达制动控制的时间拉长,延后马达停转的时间。因此,在永磁马达于制动时,控制器40控制制动器30产生制动回路,以将马达100反馈的反电动势泄放,来达到缩短制动控制的时间,并且避免马达100的任意转动危害到使用者。
[0056]
请参阅图2a为本发明具有制动功能的马达控制系统第一实施例方框示意图,复配合参阅图1。制动器30包括多个回路开关32(其数量依下桥晶体管sl的数量而定)与电池34,且每一回路开关32包括第一端点a、第二端点b及第三端点c。每一回路开关32的第一端点a耦接控制器40,以接收下桥驱动信号组slg(s4~s6)。每一回路开关32的第二端点b耦接电池34的正极,且每一回路开关32的第三端点c分别对应地耦接下桥晶体管sl的控制端。在本实施例中,每一回路开关32为常开型三端点开关,在未有电力供应或信号控制时,第三端点c耦接第二端点b,反之则第三端点c受控耦接第一端点a。控制器40包括电源供应器42,且电源供应器42控制回路开关32中的第三端点c选择性地耦接于第一端点a或第二端点b。
[0057]
关于上桥晶体管su,当控制器40检测输入电源vin正常时,控制器40提供上桥驱动信号组sug(s1~s3)操作对应地上桥晶体管su的导通与截止,以进行马达100的驱动操作。当控制器40检测输入电源vin中断时,控制器40截止每一上桥晶体管su,以进行马达100的制动操作。
[0058]
关于下桥晶体管sl,当控制器40检测输入电源vin正常时,电源供应器42运行,以提供电力p供应回路开关32,使得回路开关32被激磁而将第三端点c耦接第一端点a,以产生驱动回路。控制器40所提供的下桥驱动信号组slg(s4~s6)通过制动器30第三端点c与第一端点a的耦接而提供至所对应地下桥晶体管sl。当控制器40检测输入电源vin中断时,电源供应器42没电而无法运行,使得回路开关32的第三端点c耦接第二端点b,以产生制动回路。此时,控制器40也因没电而无法提供下桥驱动信号组slg。在回路开关32的第三端点c耦接第二端点b时,电池34提供电池电力vb至下桥晶体管sl的控制端,使得下桥晶体管sl恒导通。此时,马达100于制动时所产生反电动势会通过下桥晶体管sl的恒导通而泄放至输入电源vin的低电压电平vin-,以避免产生输入电源vin的电平被抬升的状况(暂态)。
[0059]
然后,当输入电源vin中断后恢复至正常时,控制器40与电源供应器42也因有电而再次运行。控制器40再次提供下桥驱动信号组slg(s4~s6),且电源供应器42再次提供电力p激磁每一回路开关32,而使每一回路开关32的第三端点c耦接至第一端点a。值得一提,于本发明的一实施例中,回路开关32激磁的电力p来源并不受限于仅能由电源供应器42提供。例如但不限于,回路开关32也可直接耦接输入电源vin的高电压电平vin ,以使用输入电源vin作为回路开关32激磁的电力。
[0060]
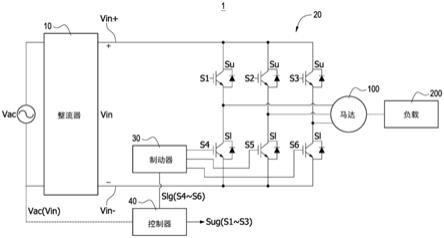
请参阅图2b为本发明具有制动功能的马达控制系统第二实施例方框示意图,复配
合参阅图1~2a。制动器30包括多个回路开关32,且回路开关32的第二端点b耦接控制器40。控制器40通过驱动电路44提供控制信号sc控制回路开关32中的第三端点c选择性地耦接于第一端点a或第二端点b。其中,第三端点c与第二端点b为常闭状态,第三端点c与第一端点a为常开状态,控制信号sc则用以控制第三端点c耦接第一端点a。有关上桥晶体管su于输入电源vin正常或异常时的操作,相似于图2a,在此不再加以赘述。
[0061]
当控制器40检测输入电源vin正常时,控制器40提供控制信号sc激磁回路开关32,以控制第三端点c耦接第一端点a而产生驱动回路,下桥驱动信号组slg(s4~s6)得以通过第三端点c与第一端点a的耦接而提供至下桥晶体管sl。当控制器40检测输入电源vin异常时,控制器40不提供控制信号sc,使得回路开关32的第三端点c耦接第二端点b,以产生制动回路。此时,控制器40所提供下桥制动信号slb通过第二端点b与第三端点c的耦接而提供至下桥晶体管sl,以通过控制下桥晶体管sl的导通与截止制动马达100。在本实施例中,输入电源vin异常所指的是,当控制器40检测输入电源vin小于或等于低电压保护值或收到急停命令ce时,代表输入电源vin异常。于本发明的各个实施例中,当输入电源vin小于或等于低电压保护值时,代表交流电源vac可能发生异常或断电而导致输入电源vin不稳定,因此必须要进行马达100的制动。于本发明的其他实施例中,当控制器40收到急停命令ce时,则代表使用者因某种因素而按下急停按钮,或是马达控制系统1收到某些警示信号(例如过温度、过电流等),因此也必须要进行马达100的制动。
[0062]
进一步而言,下桥制动信号slb为脉宽调制信号,控制器40主要是控制下桥制动信号slb的占空比(duty ratio)和频率来达到马达100制动的效果。具体而言,控制器40主要是通过调整下桥制动信号slb的信号占空比而调整制动马达100的制动力道。当信号占空比越大,则制动力道越大,反之则越小。因此,控制器40可通过调整下桥制动信号slb的信号占空比来避免马达100于制动时产生制动失速的状态。控制器40通过检测马达100的转速而判断马达100是否进入制动失速状态。当控制器40通过检测而得知马达100在制动时的当前转速相较于前一次的转速还要大时,代表马达100可能即将要失速。此时,控制器40调高信号占空比以加重制动力道,反之则维持现有的制动力道。此外,控制器40可通过调整下桥制动信号slb的切换频率而调整制动马达100的制动平顺度。当切换频率越高,则制动平顺度越平滑,反之则越粗糙。借此,可以避免马达100于制动时产生抖动的现象。在一般情况下,当控制器40收到急停命令ce时,控制器40会依据马达100的转速调整下桥制动信号slb的信号占空比,来保护使用者在最安全的情况下停止马达100的运转。
[0063]
在本发明中,马达控制系统也包括编码器(encoder)(未图示)等,马达控制系统的控制器40可以通过编码器来得知马达100的旋转角度,并据此推算出马达100的转速。由于编码器的运用属于本领域的技术人员所熟知的技术,所以本发明不另外赘述及示出编码器。
[0064]
当输入电源vin中断后恢复至大于低电压保护值或收到复归命令cr时,控制器40再次提供控制信号sc,使得回路开关32的第三端点c耦接第二端点b。然后,控制器40再次提供下桥驱动信号组slg(s4~s6)控制下桥晶体管sl的导通与截止。
[0065]
请参阅图2c为本发明具有制动功能的马达控制系统第三实施例方框示意图,复配合参阅图1~2b。图2c的电路结构为图2a与2b的整合,其包含输入电源vin中断与异常或收到急停命令ce时的制动。在图2c的实施例中,制动器30还包括制动开关36与电池开关38,且
制动回路包括第一制动回路与第二制动回路。制动开关36耦接回路开关的第二端点b及控制器40,以构成第一制动回路。电池开关38耦接回路开关的第二端点b与电池34,以构成第二制动回路。其中,电池开关38可以为常闭型的开关(例如继电器或是晶体管)。在控制器40未提供信号时,电池开关38导通,反之则截止。与电池开关38相反地,制动开关36可以为常开型的开关(例如继电器或是晶体管)。
[0066]
当控制器40检测输入电源vin小于或等于低电压保护值或收到急停命令ce时(此时,控制器40仍然可以运行),控制器40控制制动开关36导通,以使回路开关32的第二端点b耦接控制器40。此时,控制器40控制电池开关38截止,以使下桥制动信号slb能够通过制动开关36提供至下桥晶体管sl。当控制器40检测输入电源vin中断时(即控制器40可能无法运行),电池开关38导通,以使回路开关32的第二端点b耦接电池34。此时,制动开关36截止,以使电池电力vb能够通过电池开关38提供至下桥晶体管sl。值得一提,有关图2c未提及的电路动作相似于图2a与2b,在此不再加以赘述。
[0067]
进一步而言,由于必须考虑输入电源vin断电时,控制器40也会跟着失效,因此回路开关32中的第三端点c与第二端点b为常闭状态,第三端点c与第一端点a为常开状态为优选的实施方式。如此,控制器40在无法运行时,可以回归至第三端点c耦接第二端点b的常闭状态。此外,电池开关38为常闭开关,且制动开关36为常开开关为优选的实施方式。如此,控制器40在无法运行时,回归至电池34耦接下桥晶体管sl的状态。
[0068]
请参阅图3a~3b为本发明具有制动功能的马达控制方法第一实施例的方法流程图,复配合参阅图1~2c。第一实施例的马达控制方法主要是应用于图2c的电路架构,其方法首先包括,检测输入电源是否正常(s100)。当控制器40检测输入电源vin大于或等于低电压保护值时,代表输入电源vin正常。此时,控制器40控制回路开关32中的第三端点c耦接于第一端点a,且控制器40提供上桥驱动信号组sug与下桥驱动信号组slg至对应的上桥晶体管su与下桥晶体管sl,以驱动马达100。
[0069]
当输入电源vin断电时,则控制器停止提供上桥驱动信号组与下桥驱动信号组(s120)。由于输入电源vin的断电而导致控制器40失效,因此控制器40停止提供上桥驱动信号组sug与下桥驱动信号组slg,且回路开关32回复至第三端点c耦接第二端点b的常闭状态。此时,电池开关导通且制动开关截止(s140)。由于控制器40的失效,电池开关38恢复为常闭状态,且制动开关36恢复为常开状态,因此,产生电池开关38耦接回路开关的第二端点b与电池34的第二制动回路(第一制动回路为断路)。此时,电池34提供电池电力vb至下桥晶体管sl的控制端,使得下桥晶体管sl恒导通而制动马达100。
[0070]
然后,持续检测输入电源是否正常(s160)。控制器40失效之后,且输入电源vin复归时,控制器40持续检测输入电源vin是否大于或等于低电压保护值。当检测结果为”否”时,则返回步骤(s140)。当检测结果为”是”时,则控制器控制电池开关与制动开关截止,且提供上桥驱动信号组与下桥驱动信号组(s180)。当检测结果为”是”时,代表输入电源vin回归正常。控制器40控制回路开关32中的第三端点c耦接于第一端点a,且控制器40提供上桥驱动信号组sug与下桥驱动信号组slg至对应的上桥晶体管su与下桥晶体管sl,以再次驱动马达100。
[0071]
在步骤(s100)的判断结果为”是”时,即输入电源为正常时,则控制器判断是否收到急停命令(s200)。当控制器40收到急停命令ce时,则代表使用者因某种因素而按下急停
按钮,或是马达控制系统1收到某些警示信号。在步骤(s200)的判断结果为”否”时,则返回步骤(s100)。在步骤(s200)的判断结果为”是”时,则(接续图3b)控制器停止提供上桥驱动信号组与下桥驱动信号组(s220)。此时,控制器40仍然运行,且控制器40停止提供上桥驱动信号组sug与下桥驱动信号组slg,回路开关32回复至第三端点c耦接第二端点b的常闭状态。
[0072]
然后,控制器控制电池开关截止且制动开关导通(s240)。在此状况下,控制器40仍然运行,因此控制器40可控制电池开关38截止且制动开关36导通,以产生制动开关36耦接回路开关的第二端点b与控制器40的第一制动回路(第二制动回路为断路)。然后,控制器提供下桥制动信号控制下桥晶体管的导通与截止(s260)。控制器40所提供下桥制动信号slb通过第二端点b与第三端点c的耦接而提供至下桥晶体管sl,以通过控制下桥晶体管sl的导通与截止制动马达100。
[0073]
然后,控制器持续判断是否收到复归命令(s280)。当结果为”否”时,则返回步骤(s260)。当结果为”是”时,则控制器控制电池开关与制动开关截止,且提供上桥驱动信号组与下桥驱动信号组(s300)。此步骤与步骤(s180)相似,在此不再加以赘述。
[0074]
请参阅图4a~4b为本发明具有制动功能的马达控制方法第二实施例的方法流程图,复配合参阅图1~3b。第二实施例的马达控制方法主要也是应用于图2c的电路架构,其方法首先包括,检测输入电源是否异常(s400)。当控制器40检测输入电源vin小于或等于低电压保护值或收到急停命令ce时,代表输入电源vin异常。然后,控制器判断输入电源是否充足(s420)。控制器40判断输入电源vin是否大于或等于低电压保护值,以决定是否制动马达100。当判断结果为”否”时,则控制器停止提供上桥驱动信号组与下桥驱动信号组(s440)。然后,电池开关导通且制动开关截止(s460)。然后,持续检测输入电源是否正常(s480)。最后,若输入电源为正常时,控制器控制电池开关与制动开关截止,且提供上桥驱动信号组与下桥驱动信号组(s500),反之则返回步骤(s460)。其中,上述步骤(s420)~(s500)相似于图3a的步骤(s120)~(s180),差异在于由于控制器40仍然可运行,因此回路开关32、制动开关36及电池开关38的导通或截止可由控制器40所控制。其余动作皆相似,在此不再加以赘述。
[0075]
在步骤(s420)判断结果为”是”时,则控制器判断是否收到急停命令(s600)。然后(接续图4b),若收到急停命令时,控制器停止提供上桥驱动信号组与下桥驱动信号组(s620)。反之,则返回步骤(s420)。然后,控制器控制电池开关截止且制动开关导通(s640)。然后,控制器提供下桥制动信号控制下桥晶体管的导通与截止(s660)。上述步骤(s600)~(s660)相似于图3a~3b的步骤(s200)~(s260),在此不再加以赘述。
[0076]
然后,控制器持续判断输入电源是否充足(s680)。在进行马达100的制动时,控制器40仍然持续地检测输入电源vin是否小于或等于低电压保护值。当检测结果为”否”时,则进入步骤(s440)。当检测结果为”是”时,则控制器判断输入电源是否正常(s700)。控制器40判断输入电源vin是否大于或等于低电压保护值,以确认输入电源vin是否正常。当判断结果为”否”时,进入步骤(s600)。当判断结果为”是”时,则控制器确认急停命令是否被解除(s720)。在确认急停命令ce已被解除,代表马达控制系统1已排除掉需要将马达100紧急停止的状况,因此当判断结果为”是”时,则控制器控制电池开关与制动开关截止,且提供上桥驱动信号组与下桥驱动信号组(s740)。当检测结果为”是”时,代表输入电源vin回归正常,
且急停命令ce已被解除,可再次驱动马达100。其步骤与图3a的步骤(s180)相似,在此不再加以赘述。在步骤(s720)的判断结果为”否”时,则返回步骤(s660)。值得一提,于本发明的一实施例中,图3a~3b与图4a~4b的方法流程可达配应用,以使马达控制系统1可同时具有停电制动、紧急制动及欠电制动的功能。
[0077]
而,以上所述,仅为本发明优选具体实施例的详细说明与附图,而本发明的特征并不局限于此,并非用以限制本发明,本发明的所有范围应以权利要求为准,凡合于本发明权利要求的构思与其类似变化的实施例,皆应包括于本发明的范围中,任何本领域技术人员在本发明的领域内,可轻易思及的变化或修饰皆可涵盖在本公开的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。