1.本发明是有关一种马达控制装置及其控制方法,特别涉及一种具有制动功能的马达控制系统及其控制方法。
背景技术:
2.现今由马达带动位移的马达控制装置(例如电梯),通常其停电制动技术是利用一个或多个电磁闸控制。当市电断电时,由弹簧将马达轴承咬紧,以避免所带动的皮带或缆绳滑动。要启动时则将电磁闸通电而放开夹具,以让马达能够运行。亦即电磁作动即使马达控制装置运行,弹簧复归则使马达控制装置停机。
3.此设计可以确保停电时,马达被锁住而避免滑动。但是在某些马达控制装置中(例如但不限于,跑步机、电扶梯等)的应用中,通常会允许在断电时,跑带些微滑动(需有阻力),以避免有人受困时,跑带被咬紧而无法自行脱困。因此使用于电梯的马达控制装置的电路架构及控制方式并不适用于跑步机、电扶梯等设备。而且,使用于电梯的马达控制装置的机械制动装置需要定期维护,如此势必会增加使用者负担。更重要的是,通常其机械制动装置成本较高,且需在狭小跑步机控制箱内安装,使其无法降低建构成本及缩小化。
4.此外,在输入电源断电的时候,由于马达控制装置内部的控制器也会因为断电而失效,因此若无额外电源(例如电池)的情况下,会造成无法对马达的制动进行控制。
5.所以,如何设计出一种马达控制系统及其控制方法,利用自驱启动制动功能的控制方式来取代机械制动装置的机械夹止制动方式,乃为本公开发明人所欲行研究的一大课题。
技术实现要素:
6.为了解决上述问题,本发明提供一种马达控制装置,以克服现有技术的问题。马达控制装置通过直流端接收直流电源,且耦接马达,其中马达控制装置包括制动器、变频器及控制器。制动器包括耗能元件、开关元件、第一端点及第二端点,其中第一端点耦接直流端的高电压端,且第二端点耦接直流端的低电压端,且耗能元件通过开关元件耦接第一端点及第二端点之间。变频器耦接第一端点及第二端点。控制器耦接直流端,且控制变频器转换直流电源来驱动马达。当控制器判断直流电源中断时,控制器停止控制变频器,且开关元件自驱导通,以让马达产生的反电动势通过第一端点及第二端点之间的耗能元件消耗。
7.为了解决上述问题,本发明提供一种马达控制方法,以克服现有技术的问题。马达控制方法应用于马达控制装置,马达控制装置通过直流端接收直流电源,且耦接马达;马达控制装置包括制动器与变频器,且制动器包括耦接直流端的高电压端与低电压端之间的耗能元件与开关元件。马达控制方法包括:控制变频器转换直流电源为输出电源驱动马达。判断直流电源是否中断,以决定是否停止控制变频器。当判断直流电源中断时,停止控制变频器。以及,在直流电源中断时,开关元件自驱导通,以让马达产生的反电动势通过耗能元件消耗。
8.本发明的主要目的及技术效果在于,利用永磁马达特性,搭配自驱启动的制动器产生制动力道,以达到取代机械制动煞车装置,降低维护成本,增加机构设计弹性的技术效果。
9.为了能更进一步了解本发明为实现预定目的所采取的技术、手段及技术效果,请参阅以下有关本发明的详细说明与附图,相信本发明的目的、特征与特点,当可由此得一深入且具体的了解,然而附图仅提供参考与说明用,并非用来对本发明加以限制者。
附图说明
10.图1为本发明具有制动功能的马达控制装置方框示意图;
11.图2a为本发明制动器第一实施例方框示意图;
12.图2b为本发明制动器第二实施例方框示意图;
13.图2c为本发明制动器第三实施例方框示意图;
14.图2d为本发明制动器第四实施例方框示意图;
15.图3a为本发明制动器第一变形实施例方框示意图;
16.图3b为本发明制动器第二变形实施例方框示意图;及
17.图4为本发明具有制动功能的马达控制方法流程图。
18.附图标记说明:
[0019]1…
马达控制装置
[0020]
1a
…
直流端
[0021]
1a
…
高电压端
[0022]
1a
‑…
低电压端
[0023]
10
…
整流器
[0024]
20
…
变频器
[0025]
su
…
上桥晶体管
[0026]
sl
…
下桥晶体管
[0027]
30
…
制动器
[0028]
30a
…
第一端点
[0029]
30b
…
第二端点
[0030]
32
…
耗能元件
[0031]
34
…
开关元件
[0032]
34-1
…
第一接点
[0033]
34-2
…
第二接点
[0034]
34-3
…
第三接点
[0035]
342
…
激磁线圈
[0036]
36
…
单向导通元件
[0037]a…
阳极
[0038]k…
阴极
[0039]
38
…
自驱电路
[0040]q…
晶体管
[0041]
x
…
第一端
[0042]y…
第二端
[0043]z…
控制端
[0044]r…
分压电阻
[0045]
zd
…
稳压元件
[0046]
302
…
稳压电路
[0047]
40
…
控制器
[0048]
50
…
电源供应器
[0049]
100
…
马达
[0050]
200
…
负载
[0051]
vac
…
交流电源
[0052]
vdc
…
直流电源
[0053]
vo
…
输出电源
[0054]
ve
…
启用电压
[0055]
vd
…
禁能电压
[0056]
sug(s1~s3)
…
上桥驱动信号组
[0057]
slg(s4~s6)
…
下桥驱动信号组
[0058]
sv
…
电压信号
[0059]
(s100)~(s400)
…
步骤
具体实施方式
[0060]
兹有关本发明的技术内容及详细说明,配合附图说明如下:
[0061]
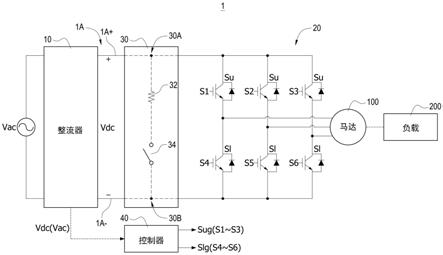
请参阅图1为本发明具有制动功能的马达控制装置方框示意图。马达控制装置1接收交流电源vac,且驱动马达100运转,以使马达100带动负载200(例如但不限于皮带)。马达控制装置1包括整流器10、变频器20、制动器30及控制器40。整流器10将交流电源vac整流为直流电源vdc。变频器20耦接整流器10,且通过直流端1a接收直流电源vdc。控制器40耦接变频器20,且根据马达控制装置1的反馈(输出反馈或输入反馈)提供上桥驱动信号组sug与下桥驱动信号组slg(脉宽调制信号)控制变频器20将直流电源vdc转换为输出电源vo,以提供输出电源vo驱动马达100运转。
[0062]
具体而言,变频器20包括多个上桥晶体管su及多个下桥晶体管sl。每个上桥晶体管su与对应的下桥晶体管sl构成一组开关桥臂,且每个开关桥臂彼此为并联耦接的电路结构。开关桥臂的数量可根据马达100的需求而定,例如但不限于可使用三组开关桥臂进行三相马达的控制。其中,上桥驱动信号组sug(例如包括信号s1~s3)与下桥驱动信号组slg(例如包括信号s4~s6)的信号数量分别对应上桥晶体管su与下桥晶体管sl的数量。每一上桥晶体管su的一端点耦接直流端1a的高电压端1a ,且每一上桥晶体管su的另一端点分别对应地耦接每一下桥晶体管sl的一端点。每一下桥晶体管sl的另一端点耦接直流电源vdc的低电压端1a-,且马达100的每一相分别耦接其中一组开关桥臂的上桥晶体管su与下桥晶体管sl之间的节点。控制器40分别耦接每一上桥晶体管su与下桥晶体管sl的控制端,且分别提供上桥驱动信号组sug(s1~s3)与下桥驱动信号组slg(s4~s6)操作上桥晶体管su与下
桥晶体管sl的导通与截止。
[0063]
制动器30包括耗能元件32、开关元件34、第一端点30a及第二端点30b。第一端点30a耦接高电压端1a 。第二端点30b耦接低电压端1a-,且耗能元件32通过开关元件34耦接第一端点30a及第二端点30b之间(即耗能元件32与开关元件34串联)。其中,制动器30的细节电路可包括多种实施方式,于后文将有进一步地说明。当控制器40判断直流电源vdc未中断时,控制器40提供上桥驱动信号组sug(s1~s3)与下桥驱动信号组slg(s4~s6)控制变频器20,且开关元件34自驱(self-driven)关断而禁能制动器30,以使控制器40通过控制变频器20而驱动马达100运转。当控制器40判断直流电源vdc中断时,控制器40停止控制变频器20,且开关元件34自驱导通而启用(致能)制动器30,以让马达100产生的反电动势通过第一端点30a与第二端点30b之间的耗能元件32消耗,使制动器30制动马达100停转。
[0064]
值得一提,于本发明的一实施例中,直流电源vdc的检测可通过直接检测整流器10的输出端而获得,亦或者是通过检测交流电源vac等方式而获得,控制器40也是通过耦接交流电源vac或直流电源vdc而获得运行时的电力来源,在此以虚线表示其来源可以依实际需求而改变检测节点与电力来源。
[0065]
进一步而言,马达100可以为永磁马达。当控制器40停止控制变频器20时,永磁马达会顺转而产生反电动势。此反电动势会通过上桥晶体管su的接面二极管反馈至直流端1a。因此,在永磁马达于制动时,控制器40控制制动器30产生制动回路,以将马达100反馈的反电动势泄放,进而对马达本身产生阻力,而达到制动效果。
[0066]
请参阅图2a为本发明制动器第一实施例方框示意图,复配合参阅图1。制动器30还包括单向导通元件36与自驱电路38,且单向导通元件36包括阳极a与阴极k。阳极a耦接高电压端1a ,且阴极k耦接第一端点30a。单向导通元件36用以在马达100制动而产生反电动势时,逆偏截止反电动势通过上桥晶体管su的接面二极管传输至直流端1a。自驱电路38耦接阳极a、阴极k、第二端点30b及开关元件34的控制端,且用以根据直流电源vdc导通或关断开关元件34。在此实施例中,开关元件34可以为晶体管。当直流电源vdc未中断时,单向导通元件36顺偏导通,且自驱电路38根据直流电源vdc自驱关断开关元件34,以禁能制动器30。当直流电源vdc中断时,单向导通元件36逆偏截止,且自驱电路38根据反电动势自驱导通开关元件34,以启用制动器30而制动马达100。值得一提,于本发明的一实施例中,单向导通元件36例如但不限于可为二极管。举凡可作为单向导通的电子元件(例如单向可控硅、闸流体等),皆应包含在本实施例的范围当中。
[0067]
进一步而言,自驱电路38包括晶体管q、分压电阻r及稳压元件zd。其中,稳压元件zd可以为齐纳二极管(zener diode)或电容等具有稳定电压功能的电子元件。晶体管q包括第一端x、第二端y及控制端z。控制端z耦接阳极a,且第二端y耦接第二端点30b。分压电阻r的一端耦接阴极k,且分压电阻r的另一端耦接第一端x与开关元件34的控制端。稳压元件zd的一端耦接分压电阻r的另一端,且稳压元件zd的另一端耦接第二端点30b。在直流电源vdc未中断时,单向导通元件36顺偏导通,且晶体管q也因具有直流电源vdc而导通。在晶体管q导通时,开关元件34的控制端被耦接至低电压端1a-,导致开关元件34自驱关断而禁能制动器30。在直流电源vdc中断时,单向导通元件36逆偏截止反电动势,且反电动势在分压电阻r与稳压元件zd之间的节点产生启用电压ve。开关元件34根据启用电压ve而自驱导通,以启用制动器30。值得一提,于本发明的一实施例中,晶体管q可以为,例如但不限于双极性晶体
管(bjt)、金属氧化物半导体场效晶体管(mosfet)及绝缘栅双极晶体管(igbt)等不同种类的半导体元件。
[0068]
其中,由于制动器30并未有经过任何的控制器进行信号的运算判断来进行开关元件34导通或关断的控制,而是经由电子元件兜成的电路,或直接根据直流端1a有无电力(后文将有进一步地说明)来进行开关元件34导通或关断的控制,因此为自驱式的控制方式(即自驱导通或自驱关断)。
[0069]
请参阅图2b为本发明制动器第二实施例方框示意图,复配合参阅图1~2a。在此实施例中,马达控制装置1还包括电源供应器50,且制动器30包括稳压电路302。电源供应器50可接收交流电源vac或直流电源vdc,且将交流电源vac或直流电源vdc转换为禁能电压vd。稳压电路302耦接第一端点30a、第二端点30b、电源供应器50及开关元件34的控制端,且于本发明的一实施例中,开关元件34可以为,例如但不限于双极性晶体管(bjt)、金属氧化物半导体场效晶体管(mosfet)及绝缘栅双极晶体管(igbt)等不同种类的半导体元件。在直流电源vdc未中断时,电源供应器50有电而运行,且将交流电源vac或直流电源vdc转换为禁能电压vd。由于禁能电压vd的电压值被设计为无法导通开关元件34,因此开关元件34自驱关断而禁能制动器30。在直流电源vdc中断时,电源供应器50没电而不运行。此时稳压电路302根据反电动势导通开关元件34,以启用制动器30而制动马达100。
[0070]
进一步而言,稳压电路302包括分压电阻r及稳压元件zd。其中,稳压元件zd可以为齐纳二极管或电容等具有稳定电压功能的电子元件。分压电阻r的一端耦接第一端点30a,且分压电阻r的另一端耦接开关元件34的控制端。稳压元件zd的一端耦接分压电阻r的另一端,且稳压元件zd的另一端耦接第二端点30b。在直流电源vdc未中断时,电源供应器50提供禁能电压vd,因此分压电阻r与稳压元件zd之间的节点被拉至禁能电压vd的电压电平而无法导通开关元件34。在直流电源vdc中断时,电源供应器50没电而不运行。此时反电动势在分压电阻r与稳压元件zd之间的节点产生启用电压ve。开关元件34根据启用电压ve而自驱导通,以启用制动器30。
[0071]
请参阅图2c为本发明制动器第三实施例方框示意图,复配合参阅图1~2b。在此实施例中,马达控制装置1还包括电源供应器50,且开关元件34为三端点切换开关。三端点切换开关包括第一接点34-1、第二接点34-2、第三接点34-3及激磁线圈342,且第一接点34-1与第二接点34-2为常开状态,第二接点34-2与第三接点34-3为常闭状态。第一接点34-1耦接高电压端1a ,且第二接点34-2耦接变频器20。第三接点34-3耦接耗能元件32,且激磁线圈342耦接电源供应器50。当第一接点34-1耦接第二接点34-2时,开关元件34为驱动状态,马达控制装置1可驱动马达100运转。当第二接点34-2耦接第三接点34-3时,开关元件34为制动状态,马达控制装置1可制动马达100停转。在直流电源vdc未中断时,电源供应器50有电,且通过激磁线圈342激磁开关元件34。开关元件34被激磁线圈342激磁,使得第一接点34-1耦接第二接点34-2(即开关元件34切换至驱动状态)而导通高电压端1a 至变频器20的路径。此时,直流电源vdc通过开关元件34提供至变频器20。在直流电源vdc中断时,电源供应器50没电而无法通过激磁线圈342激磁开关元件34。开关元件34恢复至第二接点34-2耦接第三接点34-3的常闭状态(即开关元件34切换至制动状态),且变频器20至第一端点30a的路径被导通。此时,反电动势通过变频器20(接面二极管)与开关元件34提供至耗能元件32。值得一提,于本发明的一实施例中,开关元件34也可设置于低电压端1a-。意即,第一接
点34-1耦接低电压端1a-,第二接点34-2耦接第二端点30b。虽然设置于低电压端1a-与图2c所示的位置恰巧相反,但控制方式及所实现的技术效果为相同,在此不再加以赘述。
[0072]
请参阅图2d为本发明制动器第四实施例方框示意图,复配合参阅图1~2c。在此实施例中,开关元件34为常闭开关,且开关元件34的控制端耦接直流端1a,以接收对应直流电源vdc的电压信号sv。电压信号sv例如但不限于,可通过分压电阻分压的方式提供至开关元件34的控制端。在直流电源vdc未中断时,开关元件34根据高电平的电压信号sv自驱关断,以禁能制动器30。在直流电源vdc中断时,电压信号sv为低电平,开关元件34恢复至常闭状态而自驱导通,以启用制动器30。值得一提,于本发明的一实施例中,开关元件34也可设置于耗能元件32的另外一侧(即接近高电压端1a 的一侧)。虽然置于耗能元件32另外一侧与图2d所示的位置恰巧相反,但控制方式及所实现的技术效果为相同,在此不再加以赘述。
[0073]
请参阅图3a为本发明制动器第一变形实施例方框示意图、图3b为本发明制动器第二变形实施例方框示意图,复配合参阅图1~2d。在此实施例之中,制动器包括至少一开关元件34,且开关元件34的数量对应马达100的相数。马达控制装置1包括电源供应器50,且开关元件34为常闭开关。在直流电源vdc未中断时,电源供应器50有电而运行,且控制开关元件34关断,以禁能制动器30。在直流电源vdc中断时,电源供应器50没电而不运行。此时,开关元件34恢复至常闭状态而导通,以将马达100通过开关元件34耦接至中性点(图未示)而启用制动器30。当马达100为三相马达时,开关元件34可以使用δ接(图3a)或y接(图3b)的电路结构。
[0074]
请参阅图4为本发明具有制动功能的马达控制方法流程图,复配合参阅图1~3b。马达控制方法首先包括,控制变频器将直流电源转换为输出电源驱动马达(s100)。控制器40根据马达控制装置1的反馈(输出反馈或输入反馈)提供上桥驱动信号组sug与下桥驱动信号组slg(脉宽调制信号)控制变频器20将直流电源vdc转换为输出电源vo,以提供输出电源vo驱动马达100运转。然后,判断直流电源是否中断,以决定是否停止控制变频器(s200)。当控制器40判断直流电源vdc未中断时,控制器40提供上桥驱动信号组sug(s1~s3)与下桥驱动信号组slg(s4~s6)控制变频器20。然后,当判断直流电源中断时,停止控制变频器(s300)。
[0075]
最后,在直流电源中断时,开关元件自驱导通,以让马达产生的反电动势通过耗能元件消耗(s400)。当直流电源vdc中断时,开关元件34自驱导通而启用制动器30,以让马达100产生的反电动势通过第一端点30a与第二端点30b之间的耗能元件32消耗,使制动器30制动马达100停转。值得一提,于本发明的一实施例中,图4的马达控制方法适用于上述图2a~2d的电路架构,且细节的控制方式因应图2a~2d的电路架构而有所不同,其细节控制方式可相应地参考图2a~2d的相关描述,在此不再加以赘述。
[0076]
而,以上所述,仅为本发明优选具体实施例的详细说明与附图,而本发明的特征并不局限于此,并非用以限制本发明,本发明的所有范围应以权利要求为准,凡合于本发明权利要求的构思与其类似变化的实施例,皆应包括于本发明的范围中,任何本领域技术人员在本发明的领域内,可轻易思及的变化或修饰皆可涵盖在本公开的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。