1.本发明涉及背靠背柔性直流输电技术领域,具体涉及一种柔直背靠背系统直流电流谐波抑制方法及谐波抑制器。
背景技术:
2.柔直背靠背系统是指无直流传输线路的双端柔性直流输电系统,主要用于交流电网互联。柔直背靠背系统具有功与无功快速解耦、独立控制的优点,可实现对无源系统供电,同时不存在常规直流输电技术中常见的换相失败的问题,受到了广泛的关注。
3.柔直背靠背系统的核心器件为换流阀,其拓扑结构如图1所示,包括六个桥臂,每个桥臂包括n个hbsm子模块,每个hbsm子模块中设有igbt开关t1和igbt开关t2。柔直背靠背系统运行时,通过调制算法将各桥臂的参考电压转化成各桥臂中igbt开关的触发脉冲,实现对各开关的控制,最终实现功率、电压等的控制。由于开关频率优化策略的投入,换流阀各桥臂内hbsm子模块电容电压之间的不均衡程度加剧,导致直流电流出现谐波,影响系统的稳定运行。因此亟待提出一种柔直背靠背系统直流电流谐波抑制策略。
技术实现要素:
4.(一)发明目的
5.本发明的目的是提供一种柔直背靠背系统直流电流谐波抑制方法及谐波抑制器,用于解决系统运行时直流电流中的谐波问题。
6.(二)技术方案
7.为解决上述问题,本技术的第一方面提供一种柔直背靠背系统直流电流谐波抑制方法,包括:
8.实时获取换流阀的电气量信息,所述电气量信息包括阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值;
9.根据所述阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值确定换流阀各相环流瞬时值;
10.将所述各相环流瞬时值分别乘以预设比例系数,生成各桥臂的参考电压叠加量;
11.将桥臂的原始参考电压与对应的参考电压叠加量叠加生成桥臂的最终参考电压,以根据所述最终参考电压生成桥臂开关器件的触发脉冲。
12.具体地,所述根据所述阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值确定换流阀各相环流瞬时值,具体包括:
13.根据阀侧交流电压瞬时值、阀侧交流电流瞬时值确定阀侧有功功率瞬时值;
14.根据下式(ⅰ)确定各相环流瞬时值:
[0015][0016]
其中,i
loop_j
为j相环流瞬时值,j为a、b或c,p
ac
为阀侧有功功率瞬时值,i
arm_pj
为j相
上桥臂电流瞬时值,i
arm_nj
为j相下桥臂电流瞬时值,u
dc
为直流母线电压瞬时值。
[0017]
具体地,阀侧交流电流以流入阀为电流正方向,上桥臂电流以直流到交流流向为电流正方向,下桥臂电流以交流到直流流向为电流正方向,有功功率以整流方向为正方向。
[0018]
具体地,所述根据正负直流母线对地电压确定直流母线电压瞬时值,根据阀侧交流电压瞬时值、阀侧交流电流瞬时值确定阀侧有功功率瞬时值,具体包括:
[0019]
根据下式(ⅱ)确定直流母线电压瞬时值:
[0020]udc
=u
dc -u
dc-ꢀꢀꢀ
(ⅱ)
[0021]
其中,u
dc
为正直流母线对地电压瞬时值,u
dc-为负直流母线对地电压瞬时值;
[0022]
根据下式(ⅲ)确定阀侧有功功率瞬时值:
[0023]
p
ac
=uaia ubib ucicꢀꢀꢀ
(ⅲ)
[0024]
其中,ua为a相阀侧交流电压瞬时值,ub为b相阀侧交流电压瞬时值,uc为c相阀侧交流电压瞬时值;
[0025]
ia为a相阀侧交流电流瞬时值,ib为b相阀侧交流电流瞬时值,ic为c相阀侧交流电流瞬时值。
[0026]
具体地,所述将所述各相环流瞬时值分别乘以预设比例系数,生成各桥臂的参考电压叠加量,包括:
[0027]
根据下式(ⅳ)生成各桥臂的参考电压叠加量:
[0028][0029]
其中,k
p
为预设比例系数,δu
pj
为j相上桥臂参考电压叠加量,δu
nj
为j相下桥臂参考电压叠加量。
[0030]
具体地,所述将桥臂的原始参考电压与对应的参考电压叠加量叠加生成桥臂的最终参考电压,包括:
[0031]
根据下式(
ⅴ
)生成最终参考电压:
[0032][0033]
其中,u
pj
为j相上桥臂原始参考电压,δu
pj
为j相上桥臂参考电压叠加量,u’pj
为j相上桥臂的最终参考电压,u
nj
为j相下桥臂原始参考电压,δu
nj
为j相下桥臂参考电压叠加量,u’nj
为j相下桥臂的最终参考电压。
[0034]
本技术得第二方面提供了一种柔直背靠背系统直流电流谐波抑制器,包括:
[0035]
获取模块,用于实时获取换流阀的电气量信息,所述电气量信息包括阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值;
[0036]
各相环流确定模块,用于根据所述阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值确定换流阀各相环流瞬时值;
[0037]
第一生成模块,用于将所述各相环流瞬时值分别乘以预设比例系数,生成各桥臂的参考电压叠加量;
[0038]
第二生成模块,用于将桥臂的原始参考电压与对应的参考电压叠加量叠加生成桥臂的最终参考电压,以根据所述最终参考电压生成桥臂开关器件的触发脉冲。
[0039]
具体地,各相环流确定模块,用于:
[0040]
根据阀侧交流电压瞬时值、阀侧交流电流瞬时值确定阀侧有功功率瞬时值;
[0041]
根据下式(ⅰ)确定各相环流瞬时值:
[0042][0043]
其中,i
loop_j
为j相环流瞬时值,j为a、b或c,p
ac
为阀侧有功功率瞬时值,i
arm_pj
为j相上桥臂电流瞬时值,i
arm_nj
为j相下桥臂电流瞬时值。
[0044]
具体地,阀侧交流电流以流入阀为电流正方向,上桥臂电流以直流到交流流向为电流正方向,下桥臂电流以交流到直流流向为电流正方向,有功功率以整流方向为正方向。
[0045]
具体地,各相环流确定模块,用于:
[0046]
根据下式(ⅱ)确定直流母线电压瞬时值:
[0047]udc
=u
dc -u
dc-ꢀꢀꢀ
(ⅱ)
[0048]
其中,u
dc
为正直流母线对地电压瞬时值,u
dc-为负直流母线对地电压瞬时值;
[0049]
根据下式(ⅲ)确定阀侧有功功率瞬时值:
[0050]
p
ac
=uaia ubib ucicꢀꢀꢀ
(ⅲ)
[0051]
其中,ua为a相阀侧交流电压瞬时值,ub为b相阀侧交流电压瞬时值,uc为c相阀侧交流电压瞬时值;
[0052]
ia为a相阀侧交流电流瞬时值,ib为b相阀侧交流电流瞬时值,ic为c相阀侧交流电流瞬时值。
[0053]
具体地,第一生成模块,用于:
[0054]
根据下式(ⅳ)生成各桥臂的参考电压叠加量:
[0055][0056]
其中,k
p
为预设比例系数,δu
pj
为j相上桥臂参考电压叠加量,δu
nj
为j相下桥臂参考电压叠加量。
[0057]
具体地,第二生成模块,用于:
[0058]
根据下式(
ⅴ
)生成最终参考电压:
[0059][0060]
其中,u
pj
为j相上桥臂原始参考电压,δu
pj
为j相上桥臂参考电压叠加量,u’pj
为j相上桥臂的最终参考电压,u
nj
为j相下桥臂原始参考电压,δu
nj
为j相下桥臂参考电压叠加量,u’nj
为j相下桥臂的最终参考电压。
[0061]
(三)有益效果
[0062]
本发明的上述技术方案具有如下有益的技术效果:
[0063]
该方法能够在不增加开关器件开关频率和子模块电容额定工作电压的基础上实现对柔性直流背靠背系统直流电流谐波的抑制。
附图说明
[0064]
图1是本柔直背靠背系统的换流阀拓扑结构图;
[0065]
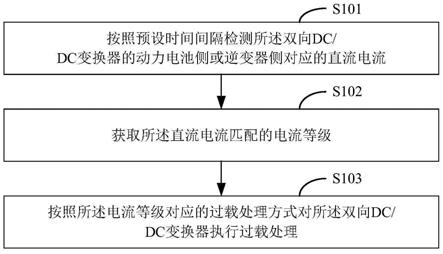
图2为本发明提供一种柔直背靠背系统直流电流谐波抑制方法流程图;
[0066]
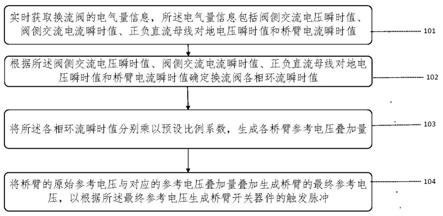
图3为本发明一具体实施例提供的柔直背靠背系统直流电流谐波抑制策略示意图;
[0067]
图3中:
[0068]
p
ac
为计算得到的交流阀侧有功功率瞬时值;u
dc
为计算得到的直流母线电压瞬时值;i
arm_pj
为j相上桥臂电流瞬时值;i
arm_nj
为j相下桥臂电流瞬时值;
[0069]id_ref
为有功电流内环参考值;i
q_ref
为无功电流内环参考值;u
pj
为j相上桥臂原始参考电压;u
nj
为j相下桥臂原始参考电压;u’pj
为j相上桥臂最终参考电压;u’nj
为j相下桥臂最终参考电压;
△upj
为j相上桥臂参考电压叠加量;
△unj
为j相下桥臂参考电压叠加量。
具体实施方式
[0070]
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0071]
参见图2,本发明提供一种柔直背靠背系统直流电流谐波抑制方法,包括:
[0072]
步骤101:实时获取换流阀的电气量信息,所述电气量信息包括阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值;
[0073]
步骤102:根据所述阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值确定换流阀各相环流瞬时值;
[0074]
步骤103:将所述各相环流瞬时值分别乘以预设比例系数,生成各桥臂的参考电压叠加量;
[0075]
步骤104:将桥臂的原始参考电压与对应的参考电压叠加量叠加生成桥臂的最终参考电压,以根据所述最终参考电压生成桥臂开关器件的触发脉冲。
[0076]
该方法在不增加开关器件开关频率和子模块电容额定工作电压的基础上实现对柔性直流背靠背系统直流电流谐波的抑制。
[0077]
具体地,所述根据所述阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值确定换流阀各相环流瞬时值,具体包括:
[0078]
根据正负直流母线对地电压确定直流母线电压瞬时值,根据阀侧交流电压瞬时值、阀侧交流电流瞬时值确定阀侧有功功率瞬时值;
[0079]
根据下式(ⅰ)确定各相环流瞬时值:
[0080]
[0081]
其中,i
loop_j
为j相环流瞬时值,j为a、b或c,p
ac
为阀侧有功功率瞬时值,i
arm_pj
为j相上桥臂电流瞬时值,i
arm_nj
为j相下桥臂电流瞬时值,u
dc
为直流母线电压瞬时值。
[0082]
采用式(ⅰ)计算相间环流,可以消除相间环流的直流分量,避免由于直流分量存在而导致的子模块工作电压增大的现象。
[0083]
具体地,阀侧交流电流以流入阀为电流正方向,上桥臂电流以直流到交流流向为电流正方向,下桥臂电流以交流到直流流向为电流正方向,有功功率以整流方向为正方向。
[0084]
具体地,所述根据正负直流母线对地电压确定直流母线电压瞬时值,根据阀侧交流电压瞬时值、阀侧交流电流瞬时值确定阀侧有功功率瞬时值,具体包括:
[0085]
根据下式(ⅱ)确定直流母线电压瞬时值:
[0086]udc
=u
dc -u
dc-ꢀꢀꢀ
(ⅱ)
[0087]
其中,u
dc
为正直流母线对地电压瞬时值,u
dc-为负直流母线对地电压瞬时值;
[0088]
根据下式(ⅲ)确定阀侧有功功率瞬时值:
[0089]
p
ac
=uaia ubib ucicꢀꢀꢀ
(ⅲ)
[0090]
其中,ua为a相阀侧交流电压瞬时值,ub为b相阀侧交流电压瞬时值,uc为c相阀侧交流电压瞬时值;
[0091]
ia为a相阀侧交流电流瞬时值,ib为b相阀侧交流电流瞬时值,ic为c相阀侧交流电流瞬时值。
[0092]
具体地,所述将所述各相环流瞬时值分别乘以预设比例系数,生成各桥臂的参考电压叠加量,包括:
[0093]
根据下式(ⅳ)生成各桥臂的参考电压叠加量:
[0094][0095]
其中,k
p
为预设比例系数,δu
pj
为j相上桥臂参考电压叠加量,δu
nj
为j相下桥臂参考电压叠加量。
[0096]
具体地,所述将桥臂的原始参考电压与对应的参考电压叠加量叠加生成桥臂的最终参考电压,包括:
[0097]
根据下式(
ⅴ
)生成最终参考电压:
[0098][0099]
其中,u
pj
为j相上桥臂原始参考电压,δu
pj
为j相上桥臂参考电压叠加量,u’pj
为j相上桥臂的最终参考电压,u
nj
为j相下桥臂原始参考电压,δu
nj
为j相下桥臂参考电压叠加量,u’nj
为j相下桥臂的最终参考电压。
[0100]
本发明还提供了一种柔直背靠背系统直流电流谐波抑制器,包括:
[0101]
获取模块,用于实时获取换流阀的电气量信息,所述电气量信息包括阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压瞬时值和桥臂电流瞬时值;
[0102]
各相环流确定模块,用于根据所述阀侧交流电压瞬时值、阀侧交流电流瞬时值、正
负直流母线对地电压瞬时值和桥臂电流瞬时值确定换流阀各相环流瞬时值;
[0103]
第一生成模块,用于将所述各相环流瞬时值分别乘以预设比例系数,生成各桥臂的参考电压叠加量;
[0104]
第二生成模块,用于将桥臂的原始参考电压与对应的参考电压叠加量叠加生成桥臂的最终参考电压,以根据所述最终参考电压生成桥臂开关器件的触发脉冲。
[0105]
具体地,各相环流确定模块,用于:
[0106]
根据正负直流母线对地电压确定直流母线电压瞬时值,根据阀侧交流电压瞬时值、阀侧交流电流瞬时值确定阀侧有功功率瞬时值;
[0107]
根据下式(ⅰ)确定各相环流瞬时值:
[0108][0109]
其中,i
loop_j
为j相环流瞬时值,j为a、b或c,p
ac
为阀侧有功功率瞬时值,i
arm_pj
为j相上桥臂电流瞬时值,i
arm_nj
为j相下桥臂电流瞬时值。
[0110]
具体地,阀侧交流电流以流入阀为电流正方向,上桥臂电流以直流到交流流向为电流正方向,下桥臂电流以交流到直流流向为电流正方向,有功功率以整流方向为正方向。
[0111]
具体地,各相环流确定模块,用于:
[0112]
根据下式(ⅱ)确定直流母线电压瞬时值:
[0113]udc
=u
dc -u
dc-ꢀꢀꢀ
(ⅱ)
[0114]
其中,u
dc
为正直流母线对地电压瞬时值,u
dc-为负直流母线对地电压瞬时值;
[0115]
根据下式(ⅲ)确定阀侧有功功率瞬时值:
[0116]
p
ac
=uaia ubib ucicꢀꢀꢀ
(ⅲ)
[0117]
其中,ua为a相阀侧交流电压瞬时值,ub为b相阀侧交流电压瞬时值,uc为c相阀侧交流电压瞬时值;
[0118]
ia为a相阀侧交流电流瞬时值,ib为b相阀侧交流电流瞬时值,ic为c相阀侧交流电流瞬时值。
[0119]
具体地,第一生成模块,用于:
[0120]
根据下式(ⅳ)生成各桥臂的参考电压叠加量:
[0121][0122]
其中,k
p
为预设比例系数,δu
pj
为j相上桥臂参考电压叠加量,δu
nj
为j相下桥臂参考电压叠加量。
[0123]
具体地,第二生成模块,用于:
[0124]
根据下式(
ⅴ
)生成最终参考电压:
[0125]
[0126]
其中,u
pj
为j相上桥臂原始参考电压,δu
pj
为j相上桥臂参考电压叠加量,u’pj
为j相上桥臂的最终参考电压,u
nj
为j相下桥臂原始参考电压,δu
nj
为j相下桥臂参考电压叠加量,u’nj
为j相下桥臂的最终参考电压。
[0127]
具体描述及效果参见方法实施例,在此不再赘述。
[0128]
以下为本发明得一个具体实施例:
[0129]
参见图3,本实施例提供了一种柔直背靠背系统直流电流谐波抑制策略,其实现包括以下步骤:
[0130]
①
测量得到阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压、桥臂电流瞬时值等电气量,并计算直流母线电压瞬时值及阀侧有功功率瞬时值;
[0131]
②
根据测算得到的电气量,求取各相环流瞬时值;
[0132]
③
将各相环流瞬时值乘以一定的比例系数生成各桥臂的参考电压叠加量;
[0133]
④
将生成的各叠加量与各桥臂的原始参考电压叠加生成最终参考电压。
[0134]
其中:
①
测量得到阀侧交流电压瞬时值、阀侧交流电流瞬时值、正负直流母线对地电压、桥臂电流瞬时值等电气量,并计算直流母线电压瞬时值和阀侧有功功率瞬时值:本发明的控制对象为各相环流,为在不引入延时的前提下去除环流中的直流分量,本发明选取通过交流阀侧功率和直流母线电压计算各相直流分量,并与各相上下桥臂电流之和的二分之一作差的方法实现,该方法的实现,需要首先测量得到阀侧交流电压、阀侧交流电流、正负直流母线对地电压、桥臂电流等电气量,并通过计算得到直流母线电压瞬时值、阀侧有功功率瞬时值,具体根据式(ⅲ)确定阀侧有功功率瞬时值;
[0135]
同时需要补充的是,所测量阀侧交流电流以流入阀为电流正方向,所测量上桥臂电流以直流到交流流向为电流正方向,所测量下桥臂电流以交流到直流流向为电流正方向,所计算功率以整流方向为正方向;
[0136]
②
根据测算得到的电气量,求取各相环流瞬时值:
[0137]
本发明选取通过交流阀侧功率和直流母线电压计算各相直流分量,并与各相上下桥臂电流之和的二分之一作差的方法实现各相环流瞬时值的计算,阀侧有功功率瞬时值已经通过上一步骤计算得到,然后通过交流阀侧功率和直流母线电压计算各相直流分量,并与各相上下桥臂电流之和的二分之一作差,计算去除了直流分量的各相环流瞬时值,具体根据式(ⅰ)计算各相环流瞬时值;
[0138]
③
将各相环流瞬时值乘以一定的比例系数生成各桥臂的参考电压叠加量:
[0139]
计算得到各相环流的瞬时值后,就需要对叠加到各桥臂参考电压上的叠加量进行计算,根据谐波抑制原理,设计采用比例控制器,将各相环流乘以特定系数,得到各桥臂参考电压的叠加量,其计算方法如式(ⅳ)所示。
[0140]
④
将生成的各叠加量与各桥臂的原始参考电压叠加生成最终参考电压,并生成开关器件的触发脉冲,实现对系统直流电流谐波的抑制:
[0141]
对直流电流谐波的抑制,是通过将叠加量叠加至参考电压上,进而实时调整投入的子模块数实现的,因此将计算得到的各个桥臂参考电压的叠加量叠加至各个桥臂的初始参考电压,生成最终参考电压,继而实现直流电流谐波的抑制;最终参考电压可以根据式(
ⅴ
)计算得到;
[0142]
通过计算得到的终版参考电压,再计算得到各开关器件的触发脉冲,实现对开关
器件的控制,最终实现对直流电流谐波的抑制。
[0143]
至此,实现了对柔直背靠背系统直流电流谐波的抑制。该方法能够在不增加开关器件开关频率和子模块电容额定工作电压的基础上实现对柔性直流背靠背系统直流电流谐波的抑制。
[0144]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0145]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0146]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0147]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0148]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。