一种基于mems-3d相机的机械臂抓取装置
技术领域
1.本实用新型涉及一种基于mems-3d相机的机械臂抓取装置,属于基于视觉引导的机械臂技术领域。
背景技术:
2.当前,基于视觉引导的机械臂抓取主要是利用二维图像特征实现目标定位,但是其无法从俯视角度对不同高度的物体进行识别,进而无法引导机械臂根据物体深度信息对目标进行抓取,限制了机械臂抓取的应用场景,不利于机械臂的推广。
技术实现要素:
3.本实用新型为了解决现有技术中存在的问题,提供一种从俯视角度识别不同高度的物体的基于mems-3d相机的机械臂抓取装置。
4.为了达到上述目的,本实用新型提出的技术方案为:一种基于mems-3d相机的机械臂抓取装置,包括相机、相机固定架和机械臂;所述相机固定架呈门框状,相机固定在相机固定架上,且相机的摄像镜头朝下,所述机械臂位于相机下方。
5.对上述技术方案的进一步设计为:所述相机固定架包括横杆和分别连接在横杆两端的两竖杆,所述相机固定在横杆底部。
6.所述竖杆底部设有与竖杆相垂直设置的支撑杆,所述竖杆和支撑杆均采用方形铝型材制成,所述竖杆滑动连接在支撑杆上。
7.所述支撑杆与竖杆之间通过直角连接件和t型螺栓进行连接,所述竖杆和支撑杆上均设有滑槽,所述滑槽内部尺寸大于开口尺寸,所述直角连接件的两直角边均设有通孔,所述t型螺栓的螺栓头滑动连接在滑槽内,t型螺栓一端依次穿过滑槽的开口和直角连接件的通孔后螺接螺帽,将直角连接件与支撑杆和竖杆连接在一起。
8.所述相机为mems-3d相机,所述横杆底部固定有塑料外壳,所述相机设置于塑料外壳内。
9.所述相机包括两个摄像镜头,分别为第一摄像镜头和第二摄像镜头,第一摄像镜头与水平面的夹角为12
°
,第二摄像镜头与水平面平行。
10.所述机械臂包括抓取前端、转动关节、机械臂底座和固定座,所述机械臂包括抓取前端、转动关节和机械臂底座依次连接,所述机械臂底座固定在固定座上。
11.所述机械臂底座和固定座上均设有螺纹孔,机械臂底座通过固定销柱从上至下依次穿过机械臂底座和固定座上的螺纹孔固定连接在固定座上。
12.所述固定销柱的半径从上至下依次减小。
13.本实用新型的有益效果在于:
14.利用mems-3d相机从俯视角度识别物体的高度,引导机械臂根据物体深度信息对目标进行抓取,有效克服了二维相机不能从俯视角度识别不同高度的物体的缺点,进而扩展了机械臂抓取物体的应用场景,便于产品的推广和使用。
附图说明
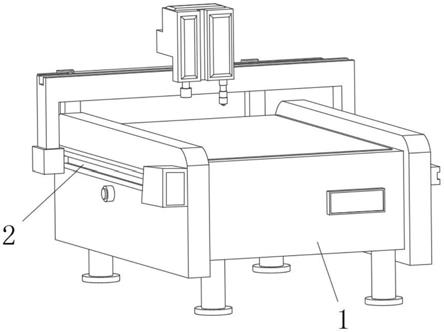
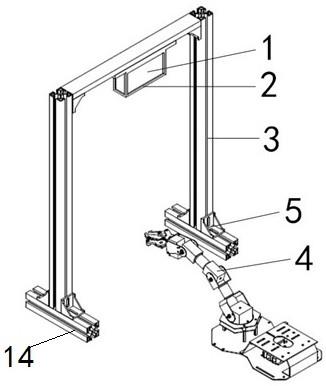
15.图1是本实用新型的装置的结构示意图;
16.图2是相机的结构示意图;
17.图3是机械臂的立体结构示意图;
18.图4为方形铝型材的截面图;
19.图5为直角连接件结构示意图。
20.附图标记说明如下:
21.1、相机;2、塑料外壳;3、相机固定架;4、机械臂;5、直角连接件;6、第一摄像镜头;7、第二摄像镜头;8、抓取前端;9、转动关节;10、机械臂底座;11、固定销柱;12、螺纹孔;13、固定座;14、支撑杆;15、滑槽;16、通孔。
具体实施方式
22.下面结合附图以及具体实施例对本实用新型进行详细说明。
实施例
23.如图1所示,本实施例的一种基于mems-3d相机的机械臂抓取装置,包括相机1、相机固定架3和机械臂4;相机固定架3呈门框状,包括横杆和设置在横杆两端的竖杆,横杆和竖杆均采用方形铝型材制成;相机1固定在相机固定架3的横杆底部,且相机1的摄像镜头朝下,机械臂4位于相机1下方。
24.本实施例中两竖杆底部均设有与竖杆相垂直设置的支撑杆14,支撑杆14采用方形铝型材制成。
25.支撑杆14与竖杆之间通过直角连接件5和t型螺栓进行连接,结合图4所示,方形铝型材的四条边上均设有滑槽15,滑槽15内部尺寸大于开口尺寸,且内部尺寸与t型螺栓头部的尺寸匹配,开口尺寸与t型螺栓的螺杆部分尺寸匹配,直角连接件5的两直角边分别与一方形铝型材接触,且均设有通孔16,t型螺栓的螺栓头滑动连接在滑槽15内,t型螺栓一端依次穿过滑槽15的开口和直角连接件5的通孔16后螺接螺帽,将直角连接件5与方形铝型材连接在一起,拧松螺帽,直角连接件5可与方形铝型材滑动连接,拧紧螺帽,直角连接件5与方形铝型材固定。本实施例中竖杆两端分别通过直角连接件5与横杆和支撑杆14连接,从而通过调节螺母拧紧或拧松,可使横杆沿竖杆上下滑动,并可使竖杆沿支撑杆14前后滑动,从而调节相机1的高度和位置,调节相机的视场范围。
26.如图2所示,相机1为mems-3d相机,横杆底部固定有塑料外壳2,相机1设置于塑料外壳2内。相机1包括两个摄像镜头,分别为第一摄像镜头6和第二摄像镜头7,第一摄像镜头6与水平面的夹角为12
°
,第二摄像镜头7与水平面平行。
27.结合图3所示,机械臂4包括抓取前端8、转动关节9、机械臂底座10和固定座13,机械臂4包括抓取前端8、转动关节9和机械臂底座10依次连接。机械臂底座10边缘均匀分布有螺纹孔12,固定座13相对应处也设有螺纹孔,机械臂底座10通过固定销柱11从上至下依次穿过机械臂底座10和固定座13上的螺纹孔12固定连接在固定座13上。
28.本实施例通过螺纹孔12配合外在螺栓、地脚螺栓的使用,可为机械臂4的固定奠定基础,固定销柱11的半径从上至下依次减小,便于固定销柱11的安装,为机械臂底座10的固
定奠定基础。螺纹孔12和固定销柱11的数量相等且一一对应,固定销柱11依次穿过机械臂底座10和固定座13上的螺纹孔12,保证各固定销柱11一一对应地安装。
29.本实施例中相机1拍摄目标物品的三维俯视图,并通过传输线传输给控制电脑。控制电脑对图片进行分析并控制机械臂抓取前端抓取目标物品。
30.本实用新型的技术方案不局限于上述各实施例,凡采用等同替换方式得到的技术方案均落在本实用新型要求保护的范围内。
技术特征:
1.一种基于mems-3d相机的机械臂抓取装置,其特征在于:包括相机(1)、相机固定架(3)和机械臂(4);所述相机固定架(3)呈门框状,相机(1)固定在相机固定架(3)上,且相机(1)的摄像镜头朝下,所述机械臂(4)位于相机(1)下方。2.根据权利要求1所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述相机固定架(3)包括横杆和分别连接在横杆两端的两竖杆,所述相机(1)固定在横杆底部。3.根据权利要求2所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述竖杆底部设有与竖杆相垂直设置的支撑杆(14),所述竖杆和支撑杆(14)均采用方形铝型材制成,所述竖杆滑动连接在支撑杆(14)上。4.根据权利要求3所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述支撑杆(14)与竖杆之间通过直角连接件(5)和t型螺栓进行连接,所述竖杆和支撑杆(14)上均设有滑槽(15),所述滑槽(15)内部尺寸大于开口尺寸,所述直角连接件(5)的两直角边均设有通孔,所述t型螺栓的螺栓头滑动连接在滑槽内,t型螺栓一端依次穿过滑槽(15)的开口和直角连接件(5)的通孔后螺接螺帽,将直角连接件(5)与支撑杆(14)和竖杆连接在一起。5.根据权利要求2所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述相机(1)为mems-3d相机,所述横杆底部固定有塑料外壳(2),所述相机(1)设置于塑料外壳(2)内。6.根据权利要求5所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述相机(1)包括两个摄像镜头,分别为第一摄像镜头(6)和第二摄像镜头(7),第一摄像镜头(6)与水平面的夹角为12
°
,第二摄像镜头(7)与水平面平行。7.根据权利要求1所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述机械臂(4)包括抓取前端(8)、转动关节(9)、机械臂底座(10)和固定座(13),所述抓取前端(8)、转动关节(9)和机械臂底座(10)依次连接,所述机械臂底座(10)固定在固定座(13)上。8.根据权利要求7所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述机械臂底座(10)和固定座(13)上均设有螺纹孔(12),机械臂底座(10)通过固定销柱(11)从上至下依次穿过机械臂底座(10)和固定座(13)上的螺纹孔(12)固定连接在固定座(13)上。9.根据权利要求8所述基于mems-3d相机的机械臂抓取装置,其特征在于:所述固定销柱(11)的半径从上至下依次减小。
技术总结
本实用新型涉及一种基于MEMS-3D相机的机械臂抓取装置,包括相机、相机固定架和机械臂;所述相机固定架呈门框状,相机固定在相机固定架上,且相机的摄像镜头朝下,所述机械臂位于相机下方。本实用新型的装置利用MEMS-3D相机从俯视角度识别物体的高度,引导机械臂根据物体深度信息对目标进行抓取,有效克服了二维相机不能从俯视角度识别不同高度的物体的缺点,进而扩展了机械臂抓取物体的应用场景,便于产品的推广和使用。品的推广和使用。品的推广和使用。
技术研发人员:赵东 顾立浩 王一安 许栋炜 刘家臣 肖瑶 杨万里 秦玉梅 唐刘 魏雨晴 王乐
受保护的技术使用者:南京信息工程大学滨江学院
技术研发日:2021.08.18
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。