1.本发明涉及混合动力能量管理策略领域,涉及一种基于前方路形信息的混合动力部件预见性能量分配优化方法及控制方法,具体说是一种重型混合动力商用车预见性能量管理方法。
背景技术:
2.混合动力汽车具有低能耗、低排放和长续驶里程的优点,是目前节能车辆的重要研究方向。在节能减排方面,商用车由于其较长的行驶里程及较大的燃油消耗量,更能够体现混合动力系统的优势。混合动力车辆研究过程中需要解决的重要问题为,如何在保证车辆动力性的前提下尽可能提高车辆燃油经济性。车辆燃油经济性的主要影响因素为能量管理策略的制定,通过制定能量管理策略实现车辆动力部件之间合理的功率分配,降低车辆油耗。
3.目前,传统混合动力能量管理策略的相关研究已经较为成熟,主要可分为四种:基于确定规则的能量管理策略、基于模糊规则的能量管理策略、基于瞬时优化的能量管理策略、基于全局优化的能量管理策略。传统能量管理策略主要侧重于车辆动力部件之间的能量分配,在满足车辆需求转矩的前提下尽可能的提高发动机节油率,并未考虑车辆未来行驶工况变化对混合动力能量管理策略制定的影响。
4.为进一步提升混合动力能量管理策略的节能效果,出现了融合车辆未来工况信息的改进能量管理策略。在改进能量管理策略中未来工况信息的获取方主要包括两种,基于智能交通系统获取车辆未来工况,即通过全球定位系统、车联网、v2x系统等确定车辆未来工况变化;基于历史工况信息预测未来工况,通过神经网络、机器学习、马尔科夫算法等基于历史工况对车辆未来工况变化进行预测。在获得未来工况相关信息后,通过动态规划、随机动态规划、模型预测控制等算法对于车辆当前及未来的动力部件能量分配进行优化,确定混合动力车辆能量分配规则。在目前融合车辆未来信息的能量管理策略相关研究中,部分研究并未实现对未来工况信息的合理利用,能量分配规则固定,无法针对工况变化进行调整;部分研究基于历史信息对未来工况进行预测,无法保证预测结果的准确性,使能量管理策略对于工况的适应性下降,无法得出最优解;部分研究中控制参数较多,算法设计复杂,优化及求解过程较为复杂;部分研究中未考虑车辆动力部件输出限制,可能会导致电池过充过放情况出现,影响电池及动力部件寿命。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提出一种重型混合动力商用车预见性能量管理方法,基于车辆前方路形信息对未来车速进行规划,根据速度规划结果及未来道路路形变化对能量分配规则进行预先调整,实现动力部件能量分配规则的预见性变化,进一步挖掘混合动力车辆的节能潜力,并防止电池过充过放及动力部件长时间高负荷工作,提高混合动力系统各部件寿命。
6.为实现上述目的,本发明是通过如下技术方案实现的:
7.重型混合动力商用车预见性能量管理方法,其特征在于,具体步骤如下:
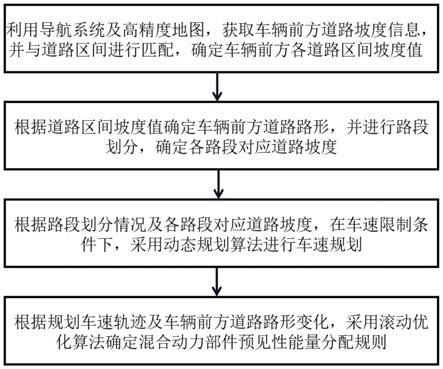
8.步骤一、利用车联网终端tbox、全球卫星定位系统、adas地图和adasis v2通信协议,获取车辆前方道路预测距离l内各道路信息采样点对应的坡度信息,并将坡度信息与道路区间进行匹配,得到车辆前方各道路区间对应的坡度值;
9.步骤二、根据步骤一中获取的车辆前方各道路区间对应的坡度值,确定各道路区间对应路形,并根据路形将车辆前方道路划分为不同路形对应路段,确定各路段对应的道路坡度;
10.步骤三、根据驾驶员设定的巡航车速、道路限速及步骤二中确定的各路段对应道路坡度,利用动态规划算法以车辆动力部件消耗能量最小为目标,确定道路预测距离l内的最优车速轨迹;
11.步骤四、根据步骤三中确定的道路预测距离l内的最优车速轨迹,结合车辆前方未来道路路形变化,进行混合动力车辆预见性能量管理,通过上坡前电池主动储能及下坡前电池大功率释放,规划电池soc变化,确定最优的发动机及电机的扭矩分配控制规则。
12.进一步的技术方案包括:
13.步骤一的具体过程如下:
14.(1)根据全球卫星定位系统获取当前车辆位置信息及行驶方向,并通过控制器局域网络,根据adasis v2通信协议从车联网终端tbox存储的adas地图中获取车辆前方道路坡度信息及限速信息,即道路预测距离l内各道路坡度信息点j对应的道路坡度αj,j=1,2
……
t,及道路限速值v
p
;
15.(2)以距离为基准将车辆前方道路预测距离l内的道路进行离散化,离散为长度为l的等长n段,并将离散后的各段道路按车辆经过先后顺序命名为道路区间i,i=1,2
……
n;
16.(3)由于根据adas地图获取的道路坡度信息点j较为密集,道路坡度信息点j的数量t大于车辆前方道路预测距离l内的道路离散数量n,将离散后的各道路区间对应坡度值与道路坡度信息点对应的道路坡度进行匹配,按车辆经过的先后顺序将坡度值si确定为道路区间i内车辆经过的第一个道路坡度信息点j对应的道路坡度αj;
17.在完成车辆前方道路预测距离l内的道路坡度αj获取及匹配后,即可确定车辆前方各道路区间对应的坡度值si。
18.步骤二的具体过程如下:
19.(1)道路区间对应路形判断
20.根据步骤一中所确定的各道路区间对应的坡度值si,将车辆前方道路预测距离l内的n段道路划分为三种路形,即平直道路、上坡道路和下坡道路;若道路区间i对应的道路坡度si在[-s
p
,s
p
]范围内,则将该段道路视为平直道路;若道路坡度si在(s
p
, ∞)范围内,则将该段道路视为上坡道路;若道路坡度si在(-∞,-s
p
)范围内,则将该段道路视为下坡道路;其中s
p
为标定值;
[0021]
(2)道路区间合并
[0022]
对于上坡道路,按车辆经过先后顺序,若从车辆经过的第一个上坡道路对应的道路区间i开始,向后连续五个及以上的道路区间均为上坡道路时,即道路区间i、i 1、i 2
……
i c均为上坡道路,c≥4,按照五个一组从道路区间i开始向后合并,对于c 1不为5的
倍数的情况,将道路区间i至i c-a按照5个一组进行合并,其中a为c 1对5的余数,并将道路区间i c-a 1至i c合并为一段,若不满足连续五个及以上的道路区间均为上坡道路,则将连续的上坡道路区间合并为一段;同理,对于下坡道路,若从车辆经过的第一个下坡道路对应的道路区间i开始,向后连续五个及以上的道路区间均为下坡道路时,即道路区间i、i 1、i 2
……
i c均为下坡道路,c≥4,按照五个一组从道路区间i开始向后合并,对于c 1不为5的倍数的情况,将道路区间i至i c-a按照5个一组进行合并,其中a为c 1对5的余数,并将道路区间i c-a 1至i c合并为一段,若不满足连续五个及以上的道路区间均为下坡道路,则将连续的下坡道路区间合并为一段;在完成上坡道路及下坡道路的合并后,道路预测距离l内的剩余道路区间则为平直道路,将相邻平直道路对应的道路区间合并;通过上述操作将道路预测距离l划分为不等长的d段,并按照车辆经过先后顺序将各段命名为区间路段β,β=1,2
……
d;
[0023]
(3)道路路段划分
[0024]
根据车辆经过各区间路段的先后顺序,从区间路段1开始向后进行逐步简化,具体过程如下:
[0025]
a.若区间路段1、区间路段2和区间路段3满足下述简化条件,区间路段1与区间路段3对应路形相同,且区间路段2中包含的道路区间i的个数小于3,则将区间路段1、区间路段2和区间路段3合并为一段,其路形为区间路段1对应的路形,将该段道路重新命名为路段1,其余区间路段按照车辆经过先后顺序重新命名为待简化路段1、待简化路段2
……
待简化路段d-3,进入下一过程;
[0026]
b.若区间路段1、区间路段2和区间路段3不满足过程a中的简化条件,则将区间路段1重新命名为路段1,其路形为区间路段1对应路形,其余区间路段按照车辆经过先后顺序重新命名为待简化路段1、待简化路段2
……
待简化路段d-1,进入下一过程;
[0027]
c.在下一过程中,对于重新命名的待简化路段1、待简化路段2和待简化路段3进行判断,若满足下述简化条件,待简化路段1与待简化路段3对应路形相同,且待简化路段2中包含的道路区间i的个数小于3,则进行简化操作,将待简化路段1、待简化路段2和待简化路段3进行合并,并重新命名为路段2,其路形为待简化路段1对应路形,其余区间路段按照车辆经过先后顺序重新命名,并进入下一过程;若不满足简化条件,则进行命名操作,将待简化路段1重新命名为路段2,其路形为待简化路段1对应路形,其余区间路段按照车辆经过先后顺序重新命名,并进入下一过程;
[0028]
d.在下一过程中,对于重新命名的待简化路段进行判断,若满足简化条件,则进行简化操作,若不满足简化条件,则进行命名操作;
[0029]
e.重复过程d至最后阶段,路形简化完成,将道路预测距离l内的道路划分为包括平直、上坡、下坡三种路形的不等长的y段,并按照车辆经过先后顺序将各段命名为路段h,h=1,2
……
y,路段h长度为lh;
[0030]
(4)道路路段对应坡度值获取
[0031]
在完成道路路段划分后,令各路段对应坡度值ph等于该路段中包含的所有道路区间对应坡度值的平均值。
[0032]
步骤三的具体过程如下:
[0033]
(1)基于距离域的动态规划算法离散化
[0034]
将动态规划算法计算过程离散化,将全局优化问题转化为连续子问题进行求解,与步骤二中道路路段划分相同,将道路预测距离l离散为不等长的y
′
段,按车辆经过的先后顺序将其命名为动态规划算法过程中的第h
′
阶段,h
′
=1,2
……y′
,其中y
′
=y,h
′
=h;
[0035]
(2)确定车速限制条件
[0036]
重型商用车的巡航过程中,对规划车速v进行限制,由驾驶员设定预期巡航车速v0,将其作为道路预测距离l内规划车速平均值vm的目标值,保证规划车速平均值vm在驾驶员设定的预期巡航车速v0上下v
l
范围内波动,平均车速限制具体形式为:
[0037]
|v
m-v0|≤v
l
[0038]
其中,v0为驾驶员设定的预期巡航车速,vm为规划车速平均值,v
l
为允许的规划车速平均值的波动值,其中v
l
为标定值;
[0039]
为保证车辆行驶安全,限制规划车速v在驾驶员设定预期巡航车速v0上下范围内波动,规划车速限制具体形式为:
[0040]
v∈(v
min
,v
max
)
[0041]vmin
=v
0-vr[0042][0043]
其中,v
min
为允许的规划车速最小值,v
max
为允许的规划车速最大值,v
p
为车辆当前行驶道路限速值,vr为允许的规划车速的波动值,其中vr为标定值;
[0044]
(3)确定动态规划算法状态变量及控制变量
[0045]
选取车辆动力部件转矩t及变速器挡位g作为动态规划过程中的系统控制变量,规划车速v作为系统状态变量,具体形式为:
[0046]
u(h
′
)=func(th′
,gh′
)
[0047]
x(h
′
)=func(vh′
)
[0048]
其中,u(h
′
)为动态规划过程中第h
′
阶段的控制变量,x(h
′
)为第h
′
阶段的状态变量,th′
为第h
′
阶段的车辆动力部件转矩,gh′
为第h
′
阶段的变速器挡位,vh′
为第h
′
阶段的规划车速;
[0049]
(4)确定惩罚函数
[0050]
以车辆动力部件消耗的能量e作为代价,定义h
′
阶段的惩罚函数j
energy
(h
′
)具体形式为:
[0051]jenergy
(h
′
)=e(uh′
)
[0052][0053]
其中,e(uh′
)为h
′
阶段车辆动力部件消耗的能量,wh′
为h
′
阶段的车辆动力部件转速;
[0054]
在惩罚函数中加入对应惩罚项进行修正,修正后的惩罚函数具体形式为:
[0055]
[0056]
其中,jh′
,y
′
为第h
′
阶段到第y
′
阶段的惩罚函数,为第h
′
阶段中状态变量a向第h
′
1阶段中状态变量b转移过程中车辆动力部件所消耗的能量,a为h
′
阶段中任意可能出现的状态变量,b为h
′
1阶段中任意可能出现的状态变量;λ1×
shift(gh′
1-gh′
)为变速箱挡位变换所对应的惩罚项,其中gh′
为第h
′
阶段的变速器档位,gh′
1
为第h
′
1阶段的变速器档位,进一步地,(gh′
1-gh′
)取0对应变速器的挡位不变且对应shift取值为0,(gh′
1-gh′
)取1对应变速器的挡位上升且对应shift取值为1,(gh′
1-gh′
)取-1对应变速器的挡位下降且对应shift取值为2;为车辆速度变化对应的惩罚项,其中vh′
为第h
′
阶段规划车速,vh′
1
为第h
′
1阶段规划车速,δv
max
为相邻时间节点之间车辆动力部件最大输出功率所确定的车速变化最大值,δv
max
>0;为规划车速相较巡航车速偏离程度对应的惩罚项;λ1、λ2和λ3均为大于0的常数;
[0057]
(5)逆向计算
[0058]
逆向计算过程中,由第y
′
阶段向第1阶段计算,确定每一阶段对应的各状态变量之间转移的惩罚函数最小值及其对应的最优控制变量值,设h
′
阶段的最优惩罚函数为:
[0059][0060]
从y
′
阶段开始向前逐步计算,确定每一阶段h
′
对应的任意可能状态变量a向下一阶段h
′
1对应的任意可能状态变量b转移过程中的惩罚函数值,以惩罚函数值最小为目标,确定每一阶段对应的任意可能状态变量向下一阶段转移的最优路径,并记录最优路径对应的惩罚函数fh′
及控制变量uh′
;
[0061]
(6)正向计算
[0062]
正向计算在逆向计算的基础上利用插值法从第1阶段开始向第y
′
阶段逐步计算,确定各阶段对应的最优控制变量及最优控制变量下的状态变量直至最后阶段即可确定整个动态规划过程中的最优控制路径及状态变量变化轨迹,具体过程如下:
[0063]
a.给定状态变量初始值x1,根据逆向计算过程中确定的最优路径插值确定该状态变量所对应的最优控制变量并根据最优控制变量确定下一阶段初始时刻对应的状态变量进入下一阶段所对应的正向计算;
[0064]
b.完成第h
′‑
1阶段的正向计算后,根据第h
′
阶段初始时刻的状态变量及逆向计算中确定的最优路径插值得出最优控制变量并确定下一阶段初始时刻的状态变量
[0065]
c.重复正向计算中的过程b直至最后第y
′
阶段,得出整个动态规划过程中的最优控制变量及状态变量序列,即可确定整个道路预测距离l内的最优车速轨迹及最优变速器档位轨迹,车速规划完成。
[0066]
步骤四的具体过程如下:
[0067]
(1)车辆未来所需功率计算
[0068]
根据步骤三中所确定的重型混合动力商用车最优车速轨迹,结合各道路区间的坡度si及车辆基本参数,由汽车行驶方程式确定整个道路预测距离l内,各道路区间k中车辆所需轮边驱动扭矩t
wk
及驱动功率pk;
[0069]
重型混合动力商用车所需驱动力fk为:
[0070][0071]
重型混合动力商用车所需轮边驱动扭矩t
wk
为:
[0072][0073]
混合动力系统所需驱动功率pk为:
[0074][0075]
其中,m为整车整备质量,g为重力加速度,f为滚动阻力系数,cd为空气阻力系数,a为迎风面积,δ为旋转质量换算系数,r为车轮滚动半径,η
t
为传动系的机械效率,vk为车辆在道路区间k的车速,进一步地vk等于步骤三中道路区间k对应路段h的车速vh′
;
[0076]
(2)确定滚动优化算法控制变量及状态变量
[0077]
在本步骤的优化过程中,算法计算过程中的步骤划分与步骤一中道路区间划分化相同,将道路预测距离l离散为等长的n
′
段,按车辆经过的先后顺序将其命名为算法计算过程中的第k
′
阶段,k
′
=1,2
……n′
,其中k
′
=k,n
′
=n,以p2构型重型混合动力商用车为例,发动机与电机扭矩同轴输出,在已知车辆所需轮边驱动扭矩t
wk
的基础上,可根据传动系传动比及发动机转矩推导出电机转矩tm,因此选取发动机转矩te作为系统控制变量,电池soc作为系统状态变量,具体形式为:
[0078]
u(k
′
)=func(t
ek
′
)
[0079]
x(k
′
)=func(sock′
)
[0080]
其中,t
ek
′
为系统第k
′
阶段的发动机转矩,sock′
为系统第k
′
阶段的电池荷电状态;
[0081]
(3)分路形确定惩罚函数
[0082]
在保证车辆燃油经济性最优的前提下,根据车辆当前及未来道路对应的路形选择不同惩罚函数,使得车辆在上坡前主动储能,通过电机主动发电提高电池soc值,保证上坡过程中电机能够充分发挥助力作用;下坡前主动释放,通过提高电机驱动功率降低电池soc值,保证下坡过程中电池有充足空间,以此进一步提高车辆燃油经济性,同时防止电池过充过放的情况出现;
[0083]
在步骤二中,将前方道路预测距离l划分为包括平直路段、上坡路段以及下坡路段的不等长的y段,首先对y段道路中的平直路段进行研究,根据车辆经过的先后顺序,若平直路段的下一路段为上坡路段,则对于所有优化初始位置对应的道路区间i在该平直路段中的优化过程,采用电池主动储能所对应的惩罚函数,使得控制策略偏向于电机发电,电池soc上升,惩罚函数具体形式为:
[0084][0085][0086]
其中,q(uk′
)为第k
′
阶段发动机燃油消耗量,i1为电池主动储能所对应的惩罚项系数,i1为大于0的常数,sock′
为第k
′
阶段的电池soc值,sock′
1
为第k
′
1阶段的电池soc值,δsoc为电机外特性所确定的电池soc变化最大值,δsoc>0,i2为电机主动储能过程中等效发动机燃油消耗量对应的惩罚项系数,i2为大于0的常数,η
oe
为油-电平均转换效率,pm为电机发电功率,η
chg
为电池充电效率,ηe为发动机平均效率,h为燃油的热值,η
t
为油-电转换支路的机械传动效率平均值;
[0087]
若平直路段的下一路段为下坡路段,则对于所有优化初始位置对应的道路区间i在该平直路段中的优化过程,采用电池主动释放所对应的惩罚函数,使得控制策略偏向于纯电机驱动,电池soc下降,惩罚函数具体形式为:
[0088][0089]
其中,i3为电池主动释放所对应的惩罚项系数,i2为大于0的常数;
[0090]
在完成平直路段的惩罚函数设定后,对于上坡路段或下坡路段,以车辆燃油经济性最优为目标进行优化,对于所有优化初始位置对应的道路区间i在非平直路段中的优化过程,采用车辆燃油经济性最优对应的惩罚函数,充分发挥电机在上坡过程中的助力作用及下坡过程中的制动能量回收作用,惩罚函数具体形式为:
[0091]jfuel
(k
′
)=q(uk′
)
[0092]
(4)确定滚动优化约束条件
[0093]
确定滚动优化过程中的约束条件,保证发动机、电机、动力电池在合理范围内工作,约束条件如下:
[0094]we_min
≤we≤w
e_max
[0095]
t
e_min
(we)≤te≤t
e_max
(we)
[0096]wm_min
≤wm≤w
m_max
[0097]
t
m_min
(wm)≤tm≤t
m_max
(wm)
[0098]
soc
min
≤soc(k
′
)≤soc
max
[0099]
其中,we为发动机转速,te为发动机输出转矩,wm为电动机转速,tm为电动机输出扭矩,soc(k
′
)为第k
′
阶段的电池荷电状态,其上限值和下限值由当前电池soc值及环境温度标定得出;
[0100]
(5)滚动优化
[0101]
在已确定车辆所需功率轨迹及不同路形各路段对应惩罚函数的基础上,采用滚动优化算法确定发动机与电机之间的最优扭矩分配,从道路区间1开始向后逐步滚动优化,具体过程如下:
[0102]
a.对于以道路区间1为初始位置的优化过程,根据步骤四的过程(3)中确定的惩罚函数,采用动态规划算法对于第1至1 q阶段的控制过程进行优化,其中q<n
′‑
1;首先进行
逆向计算,由第1 q阶段向第1阶段计算,以惩罚函数最小为目标,确定相邻阶段各状态变量之间转移的最优惩罚函数值及其对应的控制变量,其中第r阶段的最优惩罚函数值为:
[0103][0104]
其中,1≤r≤q,在确定各阶段所有可能状态之间转移的最优控制变量后,根据状态变量初始值x1,利用插值法确定第1阶段的最优控制变量并进行应用,同时得到下一阶段的状态变量初始值x2,跳转至下一过程;
[0105]
b.对于以道路区间2为初始位置的优化过程,采用动态规划算法对第2至2 q阶段的控制过程进行优化,完成逆向计算后,根据状态变量初始值x2插值确定第2阶段的最优控制变量并进行应用,同时得到下一阶段的状态变量初始值x3,跳转至下一过程;
[0106]
c.对于以道路区间z为初始位置的优化过程,其中2<z<n
′‑
q,采用动态规划算法对第z至z q阶段的控制过程进行优化,完成逆向计算后,根据状态变量初始值xz插值确定第z阶段的最优控制变量并进行应用,同时得到下一阶段的状态变量初始值x
z 1
,跳转至下一过程,重复过程c至第n
′‑
q-1阶段;
[0107]
d.对于以道路区间n
′‑
q为初始位置的优化过程,采用动态规划算法获取n
′‑
q至n
′
阶段的最优控制变量,逆向计算过程中,确定各阶段所有可能状态变量之间转移的最优路径及其控制变量,正向计算过程中,根据状态变量初始值xn′‑q,从第n
′‑
q阶段向第n
′
阶段逐步计算,利用插值法确定n
′‑
q至n
′
阶段的最优控制变量序列;
[0108]
完成滚动优化过程后,便可得到车辆前方道路预测距离l内每一阶段的最优控制变量,即每一阶段的最优发动机转矩t
ek
′
,结合基本的汽车动力学公式及步骤三中获取的最优车速轨迹与变速器档位轨迹,便可确定整个道路预测距离l内,每一阶段中发动机与电机的最优转速与转矩控制序列,实现重型混合动力商用车预见性能量管理。
[0109]
本方法中s
p
的值为3%。
[0110]
本方法中为v
l
的值为3km/h。
[0111]
若v0<70km/h,vr的值为20km/h,若v0≥70km/h,vr的值为15km/h。
[0112]
与现有技术相比本发明的有益效果是:
[0113]
本发明提供的一种重型混合动力商用车预见性能量管理方法,基于车联网终端tbox、全球卫星导航系统、adas地图和adasis v2通信协议,获取车辆前方道路信息采样点的坡度信息,并与道路区间进行匹配,确定车辆前方各道路区间坡度值;根据道路区间坡度值对道路区间进行合并,将车辆前方道路划分为不同路形的路段,并确定不同路段对应道路坡度;根据路段划分情况及各路段对应道路坡度,在驾驶员设定预期巡航车速、道路限速条件限制下,利用动态规划算法确定使车辆动力部件消耗能量最小的规划车速轨迹;根据规划车速轨迹及前方道路路形变化,采用滚动优化算法确定混合动力部件能量分配规则,根据前方道路路形变化预先调整能量分配规则,实现混合动力预见性能量管理。本发明通过导航系统与高精度地图的应用,获取车辆前方道路坡度信息并进行路形划分,在车速规划过程中不考虑混合动力能量分配,根据道路坡度及动力部件能耗确定车辆未来的最优经济性车速,在车速规划方面提高混合动力车辆的节能效果。同时,根据规划车速及未来道路路形变化,对于能量管理策略进行预见性调整,使得车辆在上下坡前预先充放电,保证在上坡过程中有充足的电量进行驱动,下坡过程中有充足电池空间进行制动能量回收,防止电
池过充过放及动力部件长时间高负荷工作,并进一步提高混合动力车辆节油率,能够实现重型混合动力商用车的节能驾驶。
附图说明
[0114]
下面结合附图对本发明作进一步的说明:
[0115]
图1为本发明提供的重型混合动力商用车预见性能量管理方法的流程示意图。
[0116]
图2为本方法中道路区间对应坡度值获取的示意图。
[0117]
图3为本方法中能耗最优车速规划的算法示意图。
[0118]
图4为本方法中预见性能量管理的算法示意图。
具体实施方式
[0119]
下面结合附图对本发明作详细的描述:
[0120]
本发明提供一种重型混合动力商用车预见性能量管理方法,基于导航系统及高精度地图,获取车辆前方道路预测距离内的道路坡度信息,并将道路坡度信息与划分的道路区间进行匹配,按照道路区间对应坡度值对车辆前方道路进行路段与路形的划分,根据各路段坡度及速度限制以动力部件消耗能量最小为目标,利用动态规划算法获取车辆未来车速,根据车速规划结果及未来道路路形变化,对于混合动力部件之间的扭矩分配进行优化,通过不同路形下惩罚函数的选择实现能量管理策略的预见性调整,并利用滚动优化算法获取动力部件之间最优的扭矩分配规则,具体步骤如下:
[0121]
步骤一、利用车联网终端tbox、全球卫星定位系统、adas地图和adasis v2通信协议,获取车辆前方道路预测距离l内各道路信息采样点对应的坡度信息,并将坡度信息与道路区间进行匹配,得到车辆前方各道路区间对应的坡度值:
[0122]
(1)根据全球卫星定位系统获取当前车辆位置信息及行驶方向,并通过控制器局域网络,根据adasis v2通信协议从车联网终端tbox存储的adas地图中获取车辆前方道路坡度信息及限速信息,即道路预测距离l内各道路坡度信息点j对应的道路坡度αj,j=1,2
……
t,及道路限速值v
p
;
[0123]
(2)以距离为基准将车辆前方道路预测距离l内的道路进行离散化,离散为长度为l的等长n段,并将离散后的各段道路按车辆经过先后顺序命名为道路区间i,i=1,2
……
n;
[0124]
(3)由于根据adas地图获取的道路坡度信息点j较为密集,道路坡度信息点j的数量t大于车辆前方道路预测距离l内的道路离散数量n,将离散后的各道路区间对应坡度值与道路坡度信息点对应的道路坡度进行匹配,按车辆经过的先后顺序将坡度值si确定为道路区间i内车辆经过的第一个道路坡度信息点j对应的道路坡度αj;
[0125]
在本步骤中,基于车联网、高精度地图以及导航系统的应用,能够精确获取车辆前方道路预测距离l内各道路坡度信息点的道路坡度αj,并将道路坡度αj与划分的道路区间进行匹配,确定车辆前方各道路区间对应的坡度值si,作为后续步骤中路形划分的基础;
[0126]
步骤二、根据步骤一中获取的车辆前方各道路区间对应的坡度值,确定各道路区间对应路形,并根据路形将车辆前方道路划分为不同路形对应路段,确定各路段对应的道路坡度:
[0127]
(1)道路区间对应路形判断
[0128]
根据步骤一中所确定的各道路区间对应的坡度值si,将车辆前方道路预测距离l内的n段道路划分为三种路形,即平直道路、上坡道路和下坡道路;若道路区间i对应的道路坡度si在[-s
p
,s
p
]范围内,则将该段道路视为平直道路;若道路坡度si在(s
p
, ∞)范围内,则将该段道路视为上坡道路;若道路坡度si在(-∞,-s
p
)范围内,则将该段道路视为下坡道路,其中s
p
为标定值,优选为3%;
[0129]
以步骤一中获取的某段道路区间坡度值数据为例,路形判断的具体结果如下:
[0130]
道路区间编号(i)坡度值(%)路形2561.25平直道路2571.76平直道路2582.37平直道路2593.63上坡道路2603.72上坡道路2613.72上坡道路2623.72上坡道路2632.88平直道路2641.62平直道路2650.58平直道路2660.16平直道路267-0.73平直道路268-1.59平直道路269-2.77平直道路270-2.86平直道路271-3.47下坡道路272-3.85下坡道路273-4.26下坡道路274-4.26下坡道路275-4.26下坡道路276-3.36下坡道路277-2.57平直道路278-2.39平直道路279-2.18平直道路280-1.31平直道路281-1.05平直道路
[0131]
(2)道路区间合并
[0132]
为减少道路路形分段个数,在分段过程中需考虑不同路形对应道路区间的连续个数;对于上坡道路,按车辆经过先后顺序,若从车辆经过的第一个上坡道路对应的道路区间i开始,向后连续五个及以上的道路区间均为上坡道路时,即道路区间i、i 1、i 2
……
i c均为上坡道路,c≥4,按照五个一组从道路区间i开始向后合并,对于c 1不为5的倍数的情况,将道路区间i至i c-a按照5个一组进行合并,其中a为c 1对5的余数,并将道路区间i c-a 1
至i c合并为一段,若不满足连续五个及以上的道路区间均为上坡道路,则将连续的上坡道路区间合并为一段;同理,对于下坡道路,若从车辆经过的第一个下坡道路对应的道路区间i开始,向后连续五个及以上的道路区间均为下坡道路时,即道路区间i、i 1、i 2
……
i c均为下坡道路,c≥4,按照五个一组从道路区间i开始向后合并,对于c 1不为5的倍数的情况,将道路区间i至i c-a按照5个一组进行合并,其中a为c 1对5的余数,并将道路区间i c-a 1至i c合并为一段,若不满足连续五个及以上的道路区间均为下坡道路,则将连续的下坡道路区间合并为一段;在完成上坡道路及下坡道路的合并后,道路预测距离l内的剩余道路区间则为平直道路,将相邻平直道路对应的道路区间合并;通过上述操作将道路预测距离l划分为不等长的d段,并按照车辆经过先后顺序将各段命名为区间路段β,β=1,2
……
d;
[0133]
以步骤二(1)中获取的某段道路路形划分结果为例,道路区间合并的具体结果如下:
[0134]
[0135][0136]
(3)道路路段划分
[0137]
为进一步降低道路分段个数,根据车辆经过各区间路段的先后顺序,从区间路段1开始向后进行逐步简化,具体过程如下:
[0138]
a.若区间路段1、区间路段2和区间路段3满足下述简化条件,区间路段1与区间路段3对应路形相同,且区间路段2中包含的道路区间i的个数小于3,则将区间路段1、区间路段2和区间路段3合并为一段,其路形为区间路段1对应的路形,将该段道路重新命名为路段1,其余区间路段按照车辆经过先后顺序重新命名为待简化路段1、待简化路段2
……
待简化路段d-3,进入下一过程;
[0139]
b.若区间路段1、区间路段2和区间路段3不满足过程a中的简化条件,则将区间路段1重新命名为路段1,其路形为区间路段1对应路形,其余区间路段按照车辆经过先后顺序重新命名为待简化路段1、待简化路段2
……
待简化路段d-1,进入下一过程;
[0140]
c.在下一过程中,对于重新命名的待简化路段1、待简化路段2和待简化路段3进行判断,若满足下述简化条件,待简化路段1与待简化路段3对应路形相同,且待简化路段2中包含的道路区间i的个数小于3,则进行简化操作,将待简化路段1、待简化路段2和待简化路段3进行合并,并重新命名为路段2,其路形为待简化路段1对应路形,其余区间路段按照车辆经过先后顺序重新命名,并进入下一过程;若不满足简化条件,则进行命名操作,将待简化路段1重新命名为路段2,其路形为待简化路段1对应路形,其余区间路段按照车辆经过先后顺序重新命名,并进入下一过程;
[0141]
d.在下一过程中,对于重新命名的待简化路段进行判断,若满足简化条件,则进行简化操作,若不满足简化条件,则进行命名操作;
[0142]
e.重复过程d至最后阶段,路形简化完成,将道路预测距离l内的道路划分为包括平直、上坡、下坡三种路形的不等长的y段,并按照车辆经过先后顺序将各段命名为路段h,h=1,2
……
y,路段h长度为lh;
[0143]
(4)道路路段对应坡度值获取
[0144]
在完成道路路段划分后,令各路段对应坡度值ph等于该路段中包含的所有道路区
间对应坡度值的平均值。
[0145]
以步骤二(2)中获取的某段道路区间合并结果为例,道路路段划分及对应坡度值获取的具体结果如下:
[0146]
[0147][0148]
步骤三、根据驾驶员设定的巡航车速、道路限速及步骤二中确定的各路段对应道路坡度,利用动态规划算法以车辆动力部件消耗能量最小为目标,确定道路预测距离l内的最优车速轨迹:
[0149]
(1)基于距离域的动态规划算法离散化
[0150]
本步骤车速规划过程中,需要将动态规划算法计算过程离散化,将全局优化问题转化为连续子问题进行求解,与步骤二中道路路段划分相同,将道路预测距离l离散为不等长的y
′
段,按车辆经过的先后顺序将其命名为动态规划算法过程中的第h
′
阶段,h
′
=1,2
……y′
,其中y
′
=y,h
′
=h;
[0151]
(2)确定车速限制条件
[0152]
重型商用车的巡航过程中,为保证车辆运输时效性,需要对规划车速v进行限制,由驾驶员设定预期巡航车速v0,将其作为道路预测距离l内规划车速平均值vm的目标值,保证规划车速平均值vm在驾驶员设定的预期巡航车速v0上下v
l
范围内波动,平均车速限制具体形式为:
[0153]
|v
m-v0|≤v
l
[0154]
其中,v0为驾驶员设定的预期巡航车速,vm为规划车速平均值,v
l
为允许的规划车速平均值的波动值,其中v
l
为标定值,优选为3km/h;
[0155]
为保证车辆行驶安全,限制规划车速v在驾驶员设定预期巡航车速v0上下范围内波动,规划车速限制具体形式为:
[0156]
v∈(v
min
,v
max
)
[0157]vmin
=v
0-vr[0158][0159]
其中,v
min
为允许的规划车速最小值,v
max
为允许的规划车速最大值,v
p
为车辆当前行驶道路限速值,vr为允许的规划车速的波动值,其中vr为标定值,若v0<70km/h,vr的值优选为20km/h,若v0≥70km/h,vr的值优选为15km/h;
[0160]
(3)确定动态规划算法状态变量及控制变量
[0161]
选取车辆动力部件转矩t及变速器挡位g作为动态规划过程中的系统控制变量,规划车速v作为系统状态变量,具体形式为:
[0162]
u(h
′
)=func(th′
,gh′
)
[0163]
x(h
′
)=func(vh′
)
[0164]
其中,u(h
′
)为动态规划过程中第h
′
阶段的控制变量,x(h
′
)为第h
′
阶段的状态变量,th′
为第h
′
阶段的车辆动力部件转矩,gh′
为第h
′
阶段的变速器挡位,vh′
为第h
′
阶段的规划车速;
[0165]
(4)确定惩罚函数
[0166]
本方法中目标车型为重型混合动力商用车,在速度规划过程中不考虑动力部件之间的能量分配,选择以车辆动力部件消耗的能量e作为代价,定义h
′
阶段的惩罚函数j
energy
(h
′
)具体形式为:
[0167]jenergy
(h
′
)=e(uh′
)
[0168][0169]
其中,e(uh′
)为h
′
阶段车辆动力部件消耗的能量,wh′
为h
′
阶段的车辆动力部件转速;
[0170]
为限制动态规划过程中变速箱频繁换挡、车速跳变、车速偏离驾驶员设定巡航车速的情况出现,在惩罚函数中加入对应惩罚项进行修正,修正后的惩罚函数具体形式为:
[0171][0172]
其中,jh′
,y
′
为第h
′
阶段到第y
′
阶段的惩罚函数,为第h
′
阶段中状态变量a向第h
′
1阶段中状态变量b转移过程中车辆动力部件所消耗的能量,a为h
′
阶段中任意可能出现的状态变量,b为h
′
1阶段中任意可能出现的状态变量;λ1×
shift(gh′
1-gh′
)为变速箱挡位变换所对应的惩罚项,其中gh′
为第h
′
阶段的变速器档位,gh′
1
为第h
′
1阶段的变速器档位,进一步地,(gh′
1-gh′
)取0对应变速器的挡位不变且对应shift取值为0,(gh′
1-gh′
)取1对应变速器的挡位上升且对应shift取值为1,(gh′
1-gh′
)取-1对应变速器的挡位下降且对应shift取值为2;为车辆速度变化对应的惩罚项,其中vh′
为第h
′
阶段规划车速,vh′
1
为第h
′
1阶段规划车速,δv
max
为相邻时间节点之间车辆动力部件最大输出功率所确定的车速变化最大值,δv
max
>0;为规划车速相较巡航车速偏离程度对应的惩罚项;λ1、λ2和λ3均为大于0的常数;
[0173]
(5)逆向计算
[0174]
逆向计算过程中,由第y
′
阶段向第1阶段计算,确定每一阶段对应的各状态变量之间转移的惩罚函数最小值及其对应的最优控制变量值,设h
′
阶段的最优惩罚函数为:
[0175][0176]
从y
′
阶段开始向前逐步计算,确定每一阶段h
′
对应的任意可能状态变量a向下一阶段h
′
1对应的任意可能状态变量b转移过程中的惩罚函数值,以惩罚函数值最小为目标,
确定每一阶段对应的任意可能状态变量向下一阶段转移的最优路径,并记录最优路径对应的惩罚函数fh′
及控制变量uh′
;
[0177]
(6)正向计算
[0178]
正向计算在逆向计算的基础上利用插值法从第1阶段开始向第y
′
阶段逐步计算,确定各阶段对应的最优控制变量及最优控制变量下的状态变量直至最后阶段即可确定整个动态规划过程中的最优控制路径及状态变量变化轨迹,具体过程如下:
[0179]
a.给定状态变量初始值x1,根据逆向计算过程中确定的最优路径插值确定该状态变量所对应的最优控制变量并根据最优控制变量确定下一阶段初始时刻对应的状态变量进入下一阶段所对应的正向计算;
[0180]
b.完成第h
′‑
1阶段的正向计算后,根据第h
′
阶段初始时刻的状态变量及逆向计算中确定的最优路径插值得出最优控制变量并确定下一阶段初始时刻的状态变量
[0181]
c.重复正向计算中的过程b直至最后第y
′
阶段,得出整个动态规划过程中的最优控制变量及状态变量序列,即可确定整个道路预测距离l内的最优车速轨迹及最优变速器档位轨迹,车速规划完成。
[0182]
步骤四、根据步骤三中确定的道路预测距离l内的最优车速轨迹,结合车辆前方未来道路路形变化,进行混合动力车辆预见性能量管理,通过上坡前电池主动储能及下坡前电池大功率释放,规划电池soc变化,确定最优的发动机及电机的扭矩分配控制规则:
[0183]
(1)车辆未来所需功率计算
[0184]
根据步骤三中所确定的重型混合动力商用车最优车速轨迹,结合各道路区间的坡度si及车辆基本参数,由汽车行驶方程式确定整个道路预测距离l内,各道路区间k中车辆所需轮边驱动扭矩t
wk
及驱动功率pk;
[0185]
重型混合动力商用车所需驱动力fk为:
[0186][0187]
重型混合动力商用车所需轮边驱动扭矩t
wk
为:
[0188][0189]
混合动力系统所需驱动功率pk为:
[0190][0191]
其中,m为整车整备质量,g为重力加速度,f为滚动阻力系数,cd为空气阻力系数,a为迎风面积,δ为旋转质量换算系数,r为车轮滚动半径,η
t
为传动系的机械效率,vk为车辆在道路区间k的车速,进一步地vk等于步骤三中道路区间k对应路段h的车速vh′
;
[0192]
(2)确定滚动优化算法控制变量及状态变量
[0193]
在本步骤的优化过程中,算法计算过程中的步骤划分与步骤一中道路区间划分化
相同,将道路预测距离l离散为等长的n
′
段,按车辆经过的先后顺序将其命名为算法计算过程中的第k
′
阶段,k
′
=1,2
……n′
,其中k
′
=k,n
′
=n,以p2构型重型混合动力商用车为例,发动机与电机扭矩同轴输出,在已知车辆所需轮边驱动扭矩t
wk
的基础上,可根据传动系传动比及发动机转矩推导出电机转矩tm,因此选取发动机转矩te作为系统控制变量,电池soc作为系统状态变量,具体形式为:
[0194]
u(k
′
)=func(t
ek
′
)
[0195]
x(k
′
)=func(sock′
)
[0196]
其中,t
ek
′
为系统第k
′
阶段的发动机转矩,sock′
为系统第k
′
阶段的电池荷电状态;
[0197]
(3)分路形确定惩罚函数
[0198]
在保证车辆燃油经济性最优的前提下,根据车辆当前及未来道路对应的路形选择不同惩罚函数,使得车辆在上坡前主动储能,通过电机主动发电提高电池soc值,保证上坡过程中电机能够充分发挥助力作用;下坡前主动释放,通过提高电机驱动功率降低电池soc值,保证下坡过程中电池有充足空间,以此进一步提高车辆燃油经济性,同时防止电池过充过放的情况出现;通过惩罚函数的选择,实现图4中车辆在不同路形下电池soc的主动变化;
[0199]
在步骤二中,将前方道路预测距离l划分为包括平直路段、上坡路段以及下坡路段的不等长的y段,首先对y段道路中的平直路段进行研究,根据车辆经过的先后顺序,若平直路段的下一路段为上坡路段,则对于所有优化初始位置对应的道路区间i在该平直路段中的优化过程,采用电池主动储能所对应的惩罚函数,使得控制策略偏向于电机发电,电池soc上升,惩罚函数具体形式为:
[0200][0201][0202]
其中,q(uk′
)为第k
′
阶段发动机燃油消耗量,i1为电池主动储能所对应的惩罚项系数,i1为大于0的常数,sock′
为第k
′
阶段的电池soc值,sock′
1
为第k
′
1阶段的电池soc值,δsoc为电机外特性所确定的电池soc变化最大值,δsoc>0,i2为电机主动储能过程中等效发动机燃油消耗量对应的惩罚项系数,i2为大于0的常数,η
oe
为油-电平均转换效率,pm为电机发电功率,η
chg
为电池充电效率,ηe为发动机平均效率,h为燃油的热值,η
t
为油-电转换支路的机械传动效率平均值;
[0203]
若平直路段的下一路段为下坡路段,则对于所有优化初始位置对应的道路区间i在该平直路段中的优化过程,采用电池主动释放所对应的惩罚函数,使得控制策略偏向于纯电机驱动,电池soc下降,惩罚函数具体形式为:
[0204][0205]
其中,i3为电池主动释放所对应的惩罚项系数,i2为大于0的常数;
[0206]
在完成平直路段的惩罚函数设定后,对于上坡路段或下坡路段,以车辆燃油经济性最优为目标进行优化,对于所有优化初始位置对应的道路区间i在非平直路段中的优化过程,采用车辆燃油经济性最优对应的惩罚函数,充分发挥电机在上坡过程中的助力作用
及下坡过程中的制动能量回收作用,惩罚函数具体形式为:
[0207]jfuel
(k
′
)=q(uk′
)
[0208]
(4)确定滚动优化约束条件
[0209]
确定滚动优化过程中的约束条件,保证发动机、电机、动力电池在合理范围内工作,约束条件如下:
[0210]we_min
≤we≤w
e_max
[0211]
t
e_min
(we)≤te≤t
e_max
(we)
[0212]wm_min
≤wm≤w
m_max
[0213]
t
m_min
(wm)≤tm≤t
m_max
(wm)
[0214]
soc
min
≤soc(k
′
)≤soc
max
[0215]
其中,we为发动机转速,te为发动机输出转矩,wm为电动机转速,tm为电动机输出扭矩,soc(k
′
)为第k
′
阶段的电池荷电状态,其上限值和下限值由当前电池soc值及环境温度标定得出;
[0216]
(5)滚动优化
[0217]
在已确定车辆所需功率轨迹及不同路形各路段对应惩罚函数的基础上,采用滚动优化算法确定发动机与电机之间的最优扭矩分配,从道路区间1开始向后逐步滚动优化,具体过程如下:
[0218]
a.对于以道路区间1为初始位置的优化过程,根据步骤四的过程(3)中确定的惩罚函数,采用动态规划算法对于第1至1 q阶段的控制过程进行优化,其中q<n
′‑
1;首先进行逆向计算,由第1 q阶段向第1阶段计算,以惩罚函数最小为目标,确定相邻阶段各状态变量之间转移的最优惩罚函数值及其对应的控制变量,其中第r阶段的最优惩罚函数值为:
[0219][0220]
其中,1≤r≤q,在确定各阶段所有可能状态之间转移的最优控制变量后,根据状态变量初始值x1,利用插值法确定第1阶段的最优控制变量并进行应用,同时得到下一阶段的状态变量初始值x2,跳转至下一过程;
[0221]
b.对于以道路区间2为初始位置的优化过程,采用动态规划算法对第2至2 q阶段的控制过程进行优化,完成逆向计算后,根据状态变量初始值x2插值确定第2阶段的最优控制变量并进行应用,同时得到下一阶段的状态变量初始值x3,跳转至下一过程;
[0222]
c.对于以道路区间z为初始位置的优化过程,其中2<z<n
′‑
q,采用动态规划算法对第z至z q阶段的控制过程进行优化,完成逆向计算后,根据状态变量初始值xz插值确定第z阶段的最优控制变量并进行应用,同时得到下一阶段的状态变量初始值x
z 1
,跳转至下一过程,重复过程c至第n
′‑
q-1阶段;
[0223]
d.对于以道路区间n
′‑
q为初始位置的优化过程,采用动态规划算法获取n
′‑
q至n
′
阶段的最优控制变量,逆向计算过程中,确定各阶段所有可能状态变量之间转移的最优路径及其控制变量,正向计算过程中,根据状态变量初始值xn′‑q,从第n
′‑
q阶段向第n
′
阶段逐步计算,利用插值法确定n
′‑
q至n
′
阶段的最优控制变量序列;
[0224]
完成滚动优化过程后,便可得到车辆前方道路预测距离l内每一阶段的最优控制变量,即每一阶段的最优发动机转矩t
ek
′
,结合基本的汽车动力学公式及步骤三中获取的最
优车速轨迹与变速器档位轨迹,便可确定整个道路预测距离l内,每一阶段中发动机与电机的最优转速与转矩控制序列,实现重型混合动力商用车预见性能量管理。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。