1.本技术请求保护一种压印设备控制技术,尤其涉及一种压印设备中薄膜平行度控制方法。本技术还涉及压印设备中薄膜平行度控制装置。
背景技术:
2.三维纳米薄膜制造属微纳制造技术领域,而微纳制造是现代制造工业的基础技术之一,也是当前备受瞩目的重要前沿技术领域。
3.在三维纳米薄膜制造过程中,薄膜基材开卷、运行、收卷过程的稳定性,决定了三维纳米薄膜的连续压印成型质量;因此,各个卷筒及辊之间薄膜位置的控制与自动纠偏是决定压印成型质量的关键所在。在薄膜运动过程中,为了保证不发生位置和角度的偏离,需对对薄膜运动过程的平行度进行调节。
4.现有技术中,二维模糊控制器中以系统偏差e和偏差变化ec为输入语言变量;获取每个控制周期t内薄膜运动过程的平行度u,并将u作为输出语言变量。因此该类控制器类似于常规pd控制器,而pd控制器不能消除系统的累计误差,导致平行度控制稳定性不高。
技术实现要素:
5.为了解决当前技术方案中压印设备中薄膜平行度控制稳定性不高的问题,本技术提出一种压印设备中薄膜平行度控制方法以及一种压印设备中薄膜平行度控制装置。
6.本技术提供一种压印设备中薄膜平行度控制方法,包括:
7.获取薄膜运行过程中的偏差信号作为输入变量,判断所述偏差信号中的系统偏差是否小于预设偏差阈值;
8.若是,则对预设时间段内的输入变量进行积分,根据积分结果获取偏差控制量,通过所述偏差控制量消除偏差;
9.若否,则定义输入输出模糊集,根据所述输入输出模糊集求解输入输出变量的模糊划分表;
10.根据所述模糊划分表和预先设置的模糊计算规则确定模糊关系矩阵;将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量,通过所述模糊控制量和偏差控制量消除偏差。
11.可选的,所述输入输出模糊集中,输入变量语言值的子集包括:系统偏差子集和偏差变化子集;
12.所述系统偏差子集和偏差变化子集为:负大、负小、零、正小或正大,所述输入变量论域为:{-3,-2,-1,0,1,2,3}。
13.可选的,所述模块计算规则包括:系统偏差语言值、偏差变化语言值以及所述系统偏差语言值和偏差变化语言值对应的模糊控制量。
14.可选的,所述模糊关系矩阵如下:
[0015][0016]
其中,所述r
*
表示模糊关系矩阵,所述将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量的公式如下:
[0017]
u=ee*o*r
*
[0018]
其中,所述o是负大、负小、零、正小或正大中的零,所述ee是误差矩阵。
[0019]
可选的,所述消除偏差包括,采用增量式算法,公式如下:
[0020]
δu(k)=u(k)-u(k-1)=k
p
(e(k)-e(k-1) kie(k)t
[0021]
其中,u(k)为控制器的输出;e(k)为控制器的输入;kp为控制器的比例放大系数;t为控制器的积分时间。
[0022]
本技术还提供一种压印设备中薄膜平行度控制装置,包括:
[0023]
判断模块,用于获取薄膜运行过程中的偏差信号作为输入变量,判断所述偏差信号中的系统偏差是否小于预设偏差阈值;
[0024]
第一执行模块,用于,若是,则对预设时间段内的输入变量进行积分,根据积分结果获取偏差控制量,通过所述偏差控制量消除偏差;
[0025]
第二执行模块,用于若否,则定义输入输出模糊集,根据所述输入输出模糊集求解输入输出变量的模糊划分表;根据所述模糊划分表和预先设置的模糊计算规则确定模糊关系矩阵;将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量,通过所述模糊控制量和偏差控制量消除偏差。
[0026]
可选的,所述输入输出模糊集中,输入变量语言值的子集包括:系统偏差子集和偏差变化子集;
[0027]
所述系统偏差子集和偏差变化子集为:负大、负小、零、正小或正大;
[0028]
所述输入变量论域为:{-3,-2,-1,0,1,2,3}。
[0029]
可选的,所述模块计算规则包括:系统偏差语言值、偏差变化语言值以及所述系统偏差语言值和偏差变化语言值对应的模糊控制量。
[0030]
可选的,所述模糊关系矩阵如下:
[0031][0032]
其中,所述r
*
表示模糊关系矩阵,所述将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量的公式如下:
[0033]
u=ec*o*r
*
[0034]
其中,所述o是负大、负小、零、正小或正大中的零,所述ee是误差矩阵。
[0035]
可选的,所述消除偏差包括,采用增量式算法,公式如下:
[0036]
δu(k)=u(k)-u(k-1)=k
p
(e(k)-e(k-1) kie(k)t
[0037]
其中,u(k)为控制器的输出;e(k)为控制器的输入;kp为控制器的比例放大系数;t为控制器的积分时间。
[0038]
本技术相较于现有技术的优点是:
[0039]
本技术提供的一种压印设备中薄膜平行度控制方法,包括:获取薄膜运行过程中的偏差信号作为输入变量,判断所述偏差信号中的系统偏差是否小于预设偏差阈值;若是,则对预设时间段内的输入变量进行积分,根据积分结果获取偏差控制量,通过所述偏差控制量消除偏差;若否,则定义输入输出模糊集,根据所述输入输出模糊集求解输入输出变量的模糊划分表;根据所述模糊划分表和预先设置的模糊计算规则确定模糊关系矩阵;将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量,通过所述模糊控制量和偏差控制量消除偏差。本技术通过模糊算法计算薄膜运行过程中不断产生的误差,该模糊算法基于语言规则和模糊推理,有效消除了通过数学公式进行控制量计算带来的累计误差,提高薄膜平行度控制稳定性。
附图说明
[0040]
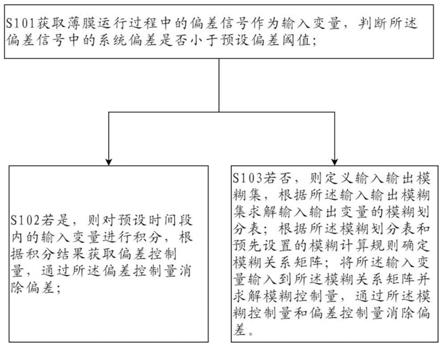
图1是本技术中压印设备中薄膜平行度控制的流程图。
[0041]
图2是本技术中压印设备中薄膜平行度控制原理示意图。
[0042]
图3是本技术中压印设备中薄膜平行度控制逻辑示意图。
[0043]
图4是本技术中压印设备中薄膜平行度控制装置示意图。
具体实施方式
[0044]
以下内容均是为了详细说明本技术要保护的技术方案所提供的具体实施过程的示例,但是本技术还可以采用不同于此的描述的其他方式实施,本领域技术人员可以在本技术构思的指引下,采用不同的技术手段实现本技术,因此本技术不受下面具体实施例的限制。
[0045]
本技术提供的一种压印设备中薄膜平行度控制方法,包括:获取薄膜运行过程中的偏差信号作为输入变量,判断所述偏差信号中的系统偏差是否小于预设偏差阈值;若是,则对预设时间段内的输入变量进行积分,根据积分结果获取偏差控制量,通过所述偏差控制量消除偏差;若否,则定义输入输出模糊集,根据所述输入输出模糊集求解输入输出变量的模糊划分表;根据所述模糊划分表和预先设置的模糊计算规则确定模糊关系矩阵;将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量,通过所述模糊控制量和偏差控制量消除偏差。本技术通过模糊算法计算薄膜运行过程中不断产生的误差,该模糊算法基于语言规则和模糊推理,有效消除了通过数学公式进行控制量计算带来的累计误差,提高薄膜平行度控制稳定性。
[0046]
图1是本技术中压印设备中薄膜平行度控制的流程图。
[0047]
请参照图1所示,s101获取薄膜运行过程中的偏差信号作为输入变量,判断所述偏
差信号中的系统偏差是否小于预设偏差阈值。
[0048]
本技术中所述偏差信号是通过纠偏传感器检测薄膜在运行过程中的位置获取的。具体的,所述纠偏传感器检测薄膜边线的位置,拾取边线位置的偏差信号。
[0049]
图2是本技术中压印设备中薄膜平行度控制原理示意图。
[0050]
请参照图2所示,所述偏差信号包括系统偏差和偏差变化,所述偏差信号输入到微控制器201中进行判断,然后根据预设的判断条件,将该偏差信号发送到模糊控制器202或者pi控制器203进行运算,最后根据运算结果进行偏差调整。
[0051]
图3是本技术中压印设备中薄膜平行度控制逻辑示意图。
[0052]
请参照图1以及图3所示,本技术中微控制器开启后首先初始化,初始化完成后通过纠偏传感器获取偏差信号,并提取所述偏差信号中的系统偏差,判断所述系统偏差是否符合预设的预设偏差阈值。优选的,本技术所述预设偏差阈值是97cmm。
[0053]
请参照图1所示,s102-1若是,则对预设时间段内的输入变量进行积分,根据积分结果获取偏差控制量,通过所述偏差控制量消除偏差。
[0054]
上述系统偏差和预设偏差阈值进行比较,当所述系统偏差小于所述预设偏差阈值,则将所述偏差信号输入到pi控制器进行控制量的计算。本技术所述pi控制器是相对于传统pd控制器而言的,该pi控制器中具有积分控制模块,用于对一段时间内的偏差进行积分。
[0055]
请参照图3所示,所述pi控制器根据所述偏差信号中的偏差值计算偏差积分,并根据所述偏差积分进行偏差量计算,然后根据所述偏差量进行偏差调整。
[0056]
具体的调整方法是:判断所述偏差量是否为正,若是,这增大控制电压;若否,则减小控制电压。在确定增大还是减小控制电压后,根据所述偏差量计算增大或者减小的调整数值,并依据所述调整数值调节驱动电机。
[0057]
完成上述调节过程后,所述纠偏传感器将继续检测偏差信号,并进入到下一轮的偏差调整。
[0058]
请参照图1所示,s102-2若否,则定义输入输出模糊集,根据所述输入输出模糊集求解输入输出变量的模糊划分表;根据所述模糊划分表和预先设置的模糊计算规则确定模糊关系矩阵;将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量,通过所述模糊控制量和偏差控制量消除偏差。
[0059]
上述系统偏差和预设偏差阈值进行比较,当所述系统偏差大于等于所述预设偏差阈值,则将所述偏差信号输入到模糊控制器进行控制量的计算。
[0060]
首先,所述模糊控制器将定义输入输出模糊集,所述输入输出模糊集的输入变量语言值的模糊子集包括:系统偏差子集和偏差变化子集,其中系统偏差子集和偏差变化子集可以是负大、负小、零、正小或者正大。所述输入变量的论域为{-3,-2,-1,0,1,2,3}。
[0061]
首先确定所述模糊子集的隶属度,即确定所述模糊子集是负大、负小、零、正小或者正大,然后根据所述模糊子集求解所述输入输出变量的模糊划分表。应当清楚的是,所述模糊集并不是非此即彼的关系定义,因此根据所述模糊集求解的划分表也是模糊划分表,其表明一个模糊集偏向于某一划分区间。
[0062]
然后,依据上述定义,建立模糊计算规则,所述模糊计算规则包括:系统偏差的语言值、偏差变化的语言值以及所述系统偏差的语言值和偏差变化的语言值对应的模糊控制
量语言值。例如,设系统偏差为e,偏差变化为ec,偏差量为n,若e正大且ec正大,得出n正大;若e负大且ec负小,则n负大;若e负大且ec负大,则n负大。本技术所述模糊计算规则是根据历史经验确定的,优选的,本技术设置由20条规则。
[0063]
根据上述模糊计算规则,以及各个语言值变量的隶属函数得出的模糊关系矩阵如下:
[0064][0065]
其中,所述r
*
表示模糊关系矩阵。
[0066]
将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量的公式如下:
[0067]
u=ee*o*r
*
[0068]
其中,所述u为控制量矩阵、所述o是负大、负小、零、正小或正大中的零,所述ee是误差矩阵。
[0069]
根据所述控制量进行偏差控制,本技术采用增量式控制算法,所述增量式控制算法的控制关系如下:
[0070]
δu(k)=u(k)-u(k-1)=k
p
(e(k)-e(k-1) kie(k)t
[0071]
其中,u(k)为控制器的输出;e(k)为控制器的输入;kp为控制器的比例放大系数;t为控制器的积分时间。
[0072]
具体的,判断所述偏差量是否为正,若是,这增大控制电压;若否,则减小控制电压。在确定增大还是减小控制电压后,根据所述偏差量计算增大或者减小的调整数值,并依据所述调整数值调节驱动电机。
[0073]
完成上述调节过程后,所述纠偏传感器将继续检测偏差信号,并进入到下一轮的偏差调整。
[0074]
根据上述控制方法对薄膜平行度进行调整,有效消除了通过数学公式进行控制量计算带来的累计误差,提高薄膜平行度控制稳定性。
[0075]
本技术还提供一种压印设备中薄膜平行度控制装置,包括:判断模块401、第一执行模块402和第二执行模块403。
[0076]
图4是本技术中压印设备中薄膜平行度控制装置示意图。
[0077]
请参照图4所示,判断模块401,用于获取薄膜运行过程中的偏差信号作为输入变量,判断所述偏差信号中的系统偏差是否小于预设偏差阈值。
[0078]
本技术中所述偏差信号是通过纠偏传感器检测薄膜在运行过程中的位置获取的。具体的,所述纠偏传感器检测薄膜边线的位置,拾取边线位置的偏差信号。
[0079]
请参照图2所示,所述偏差信号包括系统偏差和偏差变化,所述偏差信号输入到微控制器201中进行判断,然后根据预设的判断条件,将该偏差信号发送到模糊控制器202或者pi控制器203进行运算,最后根据运算结果进行偏差调整。
[0080]
请参照图4以及图3所示,本技术中微控制器开启后首先初始化,初始化完成后通过纠偏传感器获取偏差信号,并提取所述偏差信号中的系统偏差,判断所述系统偏差是否符合预设的预设偏差阈值。优选的,本技术所述预设偏差阈值是97cmm。
[0081]
请参照图4所示,第一执行模块402,用于,若是,则对预设时间段内的输入变量进行积分,根据积分结果获取偏差控制量,通过所述偏差控制量消除偏差。
[0082]
上述系统偏差和预设偏差阈值进行比较,当所述系统偏差小于所述预设偏差阈值,则将所述偏差信号输入到pi控制器进行控制量的计算。本技术所述pi控制器是相对于传统pd控制器而言的,该pi控制器中具有积分控制模块,用于对一段时间内的偏差进行积分。
[0083]
请参照图3所示,所述pi控制器根据所述偏差信号中的偏差值计算偏差积分,并根据所述偏差积分进行偏差量计算,然后根据所述偏差量进行偏差调整。
[0084]
具体的调整方法是:判断所述偏差量是否为正,若是,这增大控制电压;若否,则减小控制电压。在确定增大还是减小控制电压后,根据所述偏差量计算增大或者减小的调整数值,并依据所述调整数值调节驱动电机。
[0085]
完成上述调节过程后,所述纠偏传感器将继续检测偏差信号,并进入到下一轮的偏差调整。
[0086]
请参照图1所示,第二执行模块403,用于若否,则定义输入输出模糊集,根据所述输入输出模糊集求解输入输出变量的模糊划分表;根据所述模糊划分表和预先设置的模糊计算规则确定模糊关系矩阵;将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量,通过所述模糊控制量和偏差控制量消除偏差。
[0087]
上述系统偏差和预设偏差阈值进行比较,当所述系统偏差大于等于所述预设偏差阈值,则将所述偏差信号输入到模糊控制器进行控制量的计算。
[0088]
首先,所述模糊控制器将定义输入输出模糊集,所述输入输出模糊集的输入变量语言值的模糊子集包括:系统偏差子集和偏差变化子集,其中系统偏差子集和偏差变化子集可以是负大、负小、零、正小或者正大。所述输入变量的论域为{-3,-2,-1,0,1,2,3}。
[0089]
首先确定所述模糊子集的隶属度,即确定所述模糊子集是负大、负小、零、正小或者正大,然后根据所述模糊子集求解所述输入输出变量的模糊划分表。应当清楚的是,所述模糊集并不是非此即彼的关系定义,因此根据所述模糊集求解的划分表也是模糊划分表,其表明一个模糊集偏向于某一划分区间。
[0090]
然后,依据上述定义,建立模糊计算规则,所述模糊计算规则包括:系统偏差的语言值、偏差变化的语言值以及所述系统偏差的语言值和偏差变化的语言值对应的模糊控制量语言值。例如,设系统偏差为e,偏差变化为ec,偏差量为n,若e正大且ec正大,得出n正大;若e负大且ec负小,则n负大;若e负大且ec负大,则n负大。本技术所述模糊计算规则是根据历史经验确定的,优选的,本技术设置由20条规则。
[0091]
根据上述模糊计算规则,以及各个语言值变量的隶属函数得出的模糊关系矩阵如下:
[0092][0093]
其中,所述r
*
表示模糊关系矩阵。
[0094]
将所述输入变量输入到所述模糊关系矩阵并求解模糊控制量的公式如下:
[0095]
u=ee*o*r
*
[0096]
其中,所述u为控制量矩阵、所述o是负大、负小、零、正小或正大中的零,所述ee是误差矩阵。
[0097]
根据所述控制量进行偏差控制,本技术采用增量式控制算法,所述增量式控制算法的控制关系如下:
[0098]
δu(k)=u(k)-u(k-1)=k
p
(e(k)-e(k-1) kie(k)t
[0099]
其中,u(k)为控制器的输出;e(k)为控制器的输入;kp为控制器的比例放大系数;t为控制器的积分时间。
[0100]
具体的,判断所述偏差量是否为正,若是,这增大控制电压;若否,则减小控制电压。在确定增大还是减小控制电压后,根据所述偏差量计算增大或者减小的调整数值,并依据所述调整数值调节驱动电机。
[0101]
完成上述调节过程后,所述纠偏传感器将继续检测偏差信号,并进入到下一轮的偏差调整。
[0102]
上述控制装置对薄膜平行度进行调整,有效消除了通过数学公式进行控制量计算带来的累计误差,提高薄膜平行度控制稳定性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。