一种face id模组上料装置及其工作方法
技术领域
1.本发明涉及face id模组供料技术领域,具体涉及一种face id模组上料装置及其工作方法。
背景技术:
2.当前各类产品向着便携、轻便的方向发展,尤其是手机领域,现在的手机大多都涉及到face id功能;在face id模组在生产中,把fpc通过导电胶水粘在本体上面,需要设备来给粘接fpc的设备上料,以便本体粘接fpc;在工作过程中,先将物料放置到托盘上,然后将托盘放置到粘接fpc的设备上进行粘接,当fpc粘接设备中某一个fpc上料出现问题时,其对应的face id模组就不能进行粘接,此时需要对应的物料则不再供料给粘接fpc的设备,但是在目前上料端并没有及时处理对应的物料的结构。
技术实现要素:
3.本发明的第一目的是提供一种face id模组上料装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种face id模组上料装置,包括工作台和堆垛模块,所述工作台上设有流水线、提取机构、废料承载机构和转运模块,所述堆垛模块设于所述流水线的一端,所述转运模块位于所述流水线的另一端;所述提取机构可移动设在所述流水线的上方;所述废料承载机构包括废料固定板和废料盘,所述废料固定板设于所述提取机构的工作范围内,所述废料盘放置在所述废料固定板上。
5.进一步,所述流水线上还设有托盘拖板,所述托盘拖板靠近所述堆垛模块的一端连接有卡扣,所述卡扣连接在顶出机构的输出端,所述托盘拖板与所述顶出机构可在流水线上同步做往复运动。
6.进一步,还包括定位视觉系统、修正视觉系统和第一检测视觉系统;所述定位视觉系统安装在所述提取机构上,所述修正视觉系统安装在所述工作台上,所述第一检测视觉系统通过安装板安装在所述工作台上,且位于所述转运模块的上方。
7.进一步,还包括第二检测系统,所述第二检测系统安装在所述工作台上,且位于所述流水线上靠近所述堆垛模块的一侧。
8.进一步,所述堆垛模块包括弹匣、平移轨道、升降导轨、夹爪和驱动机构,所述夹爪连接在所述驱动机构的输出端,所述驱动机构固定在所述平移轨道上,所述夹爪通过滑座可滑动连接在所述升降导轨上,所述升降导轨可移动连接在所述平移轨道上,所述平移轨道的一侧设有料仓;所述驱动机构为第二电缸,所述料仓用于放置所述上料托盘,所述上料托盘设有与所述卡扣配合的扣位;所述弹匣为多层设置,一个所述弹匣能放置多个所述上料托盘。
9.进一步,所述流水线上至少包括1条上料轨道。
10.进一步,所述提取机构包括吸嘴、吸嘴电机、吸嘴导轨、吸嘴固定座、安装底板和斜
撑,所述吸嘴与所述吸嘴电机的输出端连接,所述吸嘴导轨可移动安装在所述工作台上,所述吸嘴固定座通过滑块安装在所述吸嘴导轨上,所述安装底板固定在所述吸嘴固定座上,所述吸嘴可上下滑动安装在所述安装底板上;所述斜撑固定在所述吸嘴固定座上,所述斜撑用于辅助支撑所述安装底板。
11.进一步,所述吸嘴为真空吸附吸嘴。
12.进一步,所述转运模块包括转运轨道、转运托盘和缓冲机构,所述转运托盘可在所述转运轨道上移动,所述缓冲机构包括缓冲挡块和缓冲气缸,所述缓冲气缸位于所述转运轨道的底部,所述缓冲挡块连接在所述缓冲气缸的输出端,所述缓冲挡块可挡住所述转运托盘。
13.进一步,还包括压力传感器,所述压力传感器设于所述上料轨道靠近所述转运模块的一端,所述压力传感器与控制器连接。
14.本发明的另一目的在于提供一种face id模组上料装置的工作方法,
15.包括以下步骤:
16.步骤一:托盘拖板移动至堆垛模块的一侧的同时,控制器驱动控制升降导轨在平移轨道上移动的驱动器启动,控制升降导轨上由夹爪夹住的弹匣移动至托盘拖板的所在位置上;
17.步骤二:顶出机构驱动卡扣伸进堆垛模块中,将堆垛模块上的上料托盘勾出来,放到流水线上;
18.步骤三:托盘拖板再带动上料托盘沿着流水线移动,压力传感器感应到托盘拖板的压力时,将信息反馈给控制器,控制器控制流水线上的动力源停止,上料托盘此时在提取机构的工作范围内停住;
19.步骤四:提取机构上的定位视觉系统对上料托盘内的物料进行定位,定位后提取机构提取上料托盘内的物料;
20.步骤五:若fpc粘接设备反馈的信息为正常供料,则控制器控制提取物料后提取机构将物料转移至转运模块上;若fpc粘接设备反馈的信息为供料异常,则控制器控制提取物料后提取机构将物料转移至废料盘上;
21.步骤六:待流水线上的上料托盘内物料全部转移至转运模块或废料盘后,控制器控制流水线上的动力源启动,上料托盘沿着流水线移动至靠近堆垛模块的一端,启动顶出机构,顶出机构控制卡扣顶出至弹匣内部放置空的上料托盘,空的上料托盘放置好后顶出机构驱动卡扣恢复原位,驱动夹爪在升降导轨上移动的驱动器驱动夹爪在升降导轨中往上移动一个位置,该位置为弹匣中装满物料的上料托盘放置的位置,此时再利用卡扣勾取上料托盘。
22.与现有技术相比,本发明的有益效果:通过堆垛模块内的上料托盘在流水线上做往复运动,上料托盘移动至靠近转运模块的一侧,当上料托盘稳定在提取机构的工作范围内时,控制器根据fpc粘接设备是否正常供料反馈的信息,控制提取机构选择将上料托盘内的物料提取至转运模块或废料盘中;实现自动化上料,且能根据fpc粘接设备是否正常供料来将物料分类,解决了上料端没有处理对应的物料的问题,同时减少人工操作,加快了生产效率。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1为本发明的整体结构示意图;
25.图2为本发明中含有托盘拖板与卡扣配合的部分结构示意图;
26.图3为本发明中含有堆垛模块的部分结构示意图;
27.图4为本发明中含有提取机构的部分结构示意图;
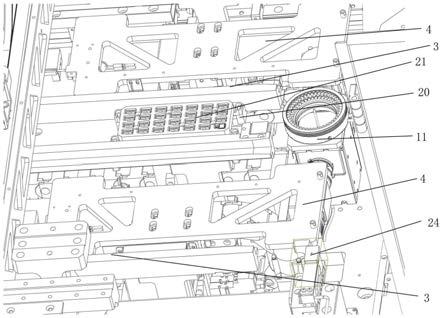
28.图5为本发明中含有废料盘的部分结构示意图;
29.图中所标各部件的名称如下:
30.1、工作台;2、堆垛模块;3、上料轨道;4、托盘拖板;5、卡扣;6、顶出机构;7、转运轨道;8、转运托盘;9、提取机构;10、扣位;11、修正视觉系统;12、第一检测视觉系统;13、弹匣;14、平移轨道;15、升降导轨;16、夹爪;17、滑座;18、料仓;19、上料托盘;20、废料固定板;21、废料盘;22、定位视觉系统;23、第二检测视觉系统;24、压力传感器;25、吸嘴;26、吸嘴导轨;27、吸嘴固定座;28、安装底板;29、斜撑;30、滑块。
具体实施方式
31.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
32.实施例:参照图1-5,一种face id模组上料装置,包括工作台1和堆垛模块2,工作台1上设有流水线、提取机构9、废料承载机构和转运模块,堆垛模块2设于流水线的一端,转运模块位于流水线的另一端;提取机构9可移动设在流水线的上方;废料承载机构包括废料固定板20和废料盘21,废料固定板20设于提取机构9的工作范围内,废料盘21放置在废料固定板20上;流水线上还设有托盘拖板4,托盘拖板4靠近堆垛模块2的一端连接有卡扣5,卡扣5连接在顶出机构6的输出端,顶出机构6为第一电缸,托盘拖板4与顶出机构6可在流水线上同步做往复运动;流水线可通过电机、皮带和皮带轮结构带动各轨道上的托盘拖板4或托盘移动。
33.还包括定位视觉系统22、修正视觉系统11和第一检测视觉系统12;定位视觉系统22安装在提取机构9上,修正视觉系统11安装在工作台1上,第一检测视觉系统12通过安装板安装在工作台1上,且位于转运模块的上方;定位视觉系统22、修正视觉系统11及第一检测视觉系统12均与控制器电性连接;当提取机构9移动至上料托盘19上方时,定位相机对上料托盘19上的物料定位,将定位信息反馈给控制器,控制器控制提取机构9准确提取物料;在提取物料后,提取机构9移动至修正视觉系统11上方,修正视觉系统11对物料拍照,将信息反馈给控制器,控制器控制提取机构9修正物料的位置,以实现物料能准确放置在转运模块上;第一检测视觉系统12用于检测转运模块上相应位置是否有物料,再将信息反馈给控制器,控制器控制提取机构9将物料放置在相应的位置上。
34.还包括第二检测系统,第二检测系统安装在工作台1上,且位于流水线上靠近堆垛模块2的一侧;当流水线上的托盘拖板4移动至堆垛模块2的一侧时,顶出机构6驱动卡扣5伸进堆垛模块2中,将堆垛模块2上的上料托盘19勾出来,放到流水线上,此时第二检测系统检测是否勾取到上料托盘19,以及检测上料托盘19是否有物料,如果没有勾取到上料托盘19或者上料托盘19没有物料,则将信息反馈给控制器,控制器做出不同的指令控制第一电缸去重新勾取上料托盘19;如果勾取到有物料的上料托盘19,则上料托盘19沿着流水线移动至提取机构9的工作范围中。
35.堆垛模块2包括弹匣13、平移轨道14、升降导轨15、夹爪16和驱动机构,夹爪16连接在驱动机构的输出端,驱动机构固定在平移轨道14上,夹爪16通过滑座17可滑动连接在升降导轨15上,升降导轨15可移动连接在平移轨道14上,平移轨道14的一侧设有料仓18;驱动机构为第二电缸,料仓18用于放置上料托盘19,上料托盘19设有与卡扣5配合的扣位10;弹匣13为多层设置,一个弹匣13能放置多个上料托盘19;如此设置,在需要运送上料托盘19至上料处时,驱动托盘拖板4在在流水线上移动的第三电缸启动,驱动托盘拖板4移动至靠近堆垛模块2的一端,控制升降导轨15在平移轨道14上移动的第四电缸启动,控制升降导轨15上由夹爪16夹住的弹匣13移动至托盘拖板4的所在位置上,启动第一电缸,第一电缸控制卡扣5顶出至弹匣13内部勾取上料托盘19对应的扣位10,勾取住上料托盘19后第一电缸驱动卡扣5将其拉出,接着第三电缸控制托盘拖板4在流水线上往转运模块的方向移动,将上料托盘19转运至提取机构9的工作范围内,提取机构9提取上料托盘19内的物料,将物料放置在转运模块上;在需要将流水线上空的上料托盘19卸下时,第三电缸启动,驱动托盘拖板4移动至靠近堆垛模块2的一端,启动第一电缸,第一电缸控制卡扣5顶出至弹匣13内部放置空的上料托盘19,空的上料托盘19放置好后第一电缸驱动卡扣5恢复原位,第二电缸驱动夹爪16在升降导轨15上往上移动一个位置,该位置为弹匣13中装满物料的上料托盘19放置的位置,此时再利用卡扣5勾取上料托盘19。
36.流水线上至少包括1条上料轨道3;如此设置,1条上料轨道3能保证基本的上料顺利运行,多条上料轨道3可以互为备份轨道,在一条轨道运送空料盘的时候,提取机构9可以提取在另外的轨道的上料托盘19中的物料。
37.提取机构9包括吸嘴25、吸嘴电机、吸嘴导轨26、吸嘴固定座27、安装底板28和斜撑29,吸嘴25与吸嘴电机的输出端连接,吸嘴25为真空吸附吸嘴,真空吸附吸嘴相比于机械手抓取,能够降低此类精密物料表面损坏的几率;吸嘴导轨26可移动安装在工作台1上,吸嘴固定座27通过滑块30安装在吸嘴导轨26上,安装底板28固定在吸嘴固定座27上,吸嘴25可上下滑动安装在安装底板28上;斜撑29固定在吸嘴固定座27上,斜撑29用于辅助支撑安装底板28;如此设置,当需要提取机构9工作时,控制器控制吸嘴导轨26的动力源电机启动,驱动吸嘴导轨26在工作台1上移动,带动吸嘴25移动至上料料盘的同一竖直方向上,控制器再控制驱动吸嘴25在吸嘴导轨26上移动的动力源电机启动,驱动吸嘴25移动至上料料盘的上方,定位视觉系统22对物料定位后,将信息反馈给控制器,控制器控制吸嘴电机启动,吸嘴25下降至物料表面,压紧物料,吸取物料;吸取物料后根据指令将物料放置到正确的位置。
38.转运模块包括转运轨道7、转运托盘8和缓冲机构,转运托盘8可在转运轨道7上移动,缓冲机构包括缓冲挡块和缓冲气缸,缓冲气缸位于转运轨道7的底部,缓冲挡块连接在缓冲气缸的输出端,缓冲挡块可挡住转运托盘8;如此设置,在前一个转运托盘8装满物料在
转运轨道7上转运至fpc粘接设备的时候,缓冲气缸将缓冲挡块顶出,后一个转运托盘8在转运轨道7上被拦住,直至前一个转运托盘8利用完成,缓冲气缸带动缓冲挡块收回,后一个转运托盘8从转运轨道7上转运至fpc粘接设备进行fpc的粘接;转运轨道7可通过电机、皮带和皮带轮结构带动轨道上的转运托盘8移动。
39.还包括压力传感器24,压力传感器24设于上料轨道3靠近转运模块的一端,压力传感器24与控制器连接;如此设置,托盘拖板4带动上料托盘19沿着流水线移动,压力传感器24感应到托盘拖板4的压力时,将信息反馈给控制器,控制器控制流水线上的动力源停止,如此能控制上料托盘19在提取机构9的工作范围内停住。
40.工作原理:包括以下步骤:
41.步骤一:托盘拖板4移动至堆垛模块2的一侧的同时,控制器驱动控制升降导轨15在平移轨道14上移动的驱动器启动,控制升降导轨15上由夹爪16夹住的弹匣13移动至托盘拖板4的所在位置上;
42.步骤二:顶出机构6驱动卡扣5伸进堆垛模块2中,将堆垛模块2上的上料托盘19勾出来,放到流水线上;
43.步骤三:托盘拖板4再带动上料托盘19沿着流水线移动,压力传感器24感应到托盘拖板4的压力时,将信息反馈给控制器,控制器控制流水线上的动力源停止,上料托盘19此时在提取机构9的工作范围内停住;
44.步骤四:提取机构9上的定位视觉系统22对上料托盘19内的物料进行定位,定位后提取机构9提取上料托盘19内的物料;
45.步骤五:若fpc粘接设备反馈的信息为正常供料,则控制器控制提取物料后提取机构9将物料转移至转运模块上;若fpc粘接设备反馈的信息为供料异常,则控制器控制提取物料后提取机构9将物料转移至废料盘21上;
46.步骤六:待流水线上的上料托盘19内物料全部转移至转运模块或废料盘21后,控制器控制流水线上的动力源启动,上料托盘19沿着流水线移动至靠近堆垛模块2的一端,启动顶出机构6,顶出机构6控制卡扣5顶出至弹匣13内部放置空的上料托盘19,空的上料托盘19放置好后顶出机构6驱动卡扣5恢复原位,驱动夹爪16在升降导轨15上移动的驱动器驱动夹爪16在升降导轨15中往上移动一个位置,该位置为弹匣13中装满物料的上料托盘19放置的位置,此时再利用卡扣5勾取上料托盘19。
47.需要说明的是:
①
上述所有提到的控制器可以包括有市面上常用的可编程序控制器或plc或单片机等、用于控制电机或气缸启闭的导线及阀门等,所述的控制器可以根据反馈信号对各机构作出相应的动作指令,以控制组装机运行对产品进行组装操作,控制器的具体控制方式不在本发明的保护范围内,在此不做赘述;
48.②
当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“上”、“下”、“左”、“右”、“前”、“后”以及类似的表述只是为了说明的目的。
49.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的
保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。