1.本发明涉及摆盘设备领域,特别涉及用于电池触摸板的自动摆盘机。
背景技术:
2.电池触摸板在生产过程中需要摆放到托盘内,而托盘内会设置有用于放置电池触摸板的凹槽,为了使得每个电池触摸板都单独放置,因此每个凹槽件都具有一定间距,目前在放置电池触摸板时,只能一个一个的将电池触摸板放置到托盘内,费时费力,严重影响生产效能。
技术实现要素:
3.本发明解决的技术问题是提供一种可实现分距摆盘的用于电池触摸板的自动摆盘机。
4.本发明解决其技术问题所采用的技术方案是:用于电池触摸板的自动摆盘机,包括机架,所述机架上表面为工作台面,所述机架内设置有满料盘输出流线、空料盘升降模组和工作料仓升降模组,所述工作料仓升降模组位于满料盘输出流线一侧,工作料仓升降模组可将料盘输出至满料盘输出流线处,所述工作台面上设置有分别与空料盘升降模组和工作料仓升降模组伸出的通口;
5.所述工作台面上设置有用于将空料盘升降模组上的料盘搬运至工作料仓升降模组处的料盘上料搬运机构、用于对工作料仓升降模组处的料盘进行定位的气缸定位机构、用于对产品进行分距操作的产品分距机构和用于将分距后的产品搬运至工作料仓升降模组出的料盘内的机械手摆盘机构。
6.进一步的是:所述料盘上料搬运机构包括第一安装架和驱动第一安装架水平移动的丝杆传动模组,所述第一安装架上设置有升降气缸,所述升降气缸的驱动轴上设置有吸盘安装板,所述吸盘安装板上设置有多个第一真空吸盘组件,还包括设置在第一安装架上的用于与第一真空吸盘组件连接的真空发生器。
7.进一步的是:所述吸盘安装板上设置有多个第五腰型槽,所述第一真空吸盘组件安装在第五腰型槽处。
8.进一步的是:所述空料盘升降模组包括第一承载板和驱动第一承载板做升降运动的第一伺服模组;
9.所述工作料仓升降模组包括第二承载板和驱动第二承载板做升降运动的第二伺服模组,所述第二承载板上设置有传动机构,所述传动机构包括第一皮带传输线和驱动第一皮带传输线转动的驱动电机。
10.进一步的是:所述机械手摆盘机构包括机械手本体,所述机械手本体的驱动轴处设置有第二安装架,所述第二安装架上设置有多个第二真空吸盘组件,所述机械手本体一侧还设置有与第二真空吸盘组件连接的真空发生器。
11.进一步的是:所述气缸定位机构包括相对设置的2个对前后方向进行定位的第一
定位机构和2个对左右方向进行定位的第二定位机构;
12.所述第一定位机构包括托举块和驱动托举块做伸出动作的第一伸出驱动气缸,所述第二定位机构包括l型压块和驱动l型压块做伸出运动的第二伸出驱动气缸。
13.进一步的是:所述产品分距机构包括底板,所述底板上分别设置有y轴移动板和y轴固定板,所述底板上还设置有用于驱动y轴移动板沿y轴方向运动的y轴驱动气缸,所述y轴移动板上设置有第一x轴固定板和第一x轴移动板,所述y轴固定板上设置有第二x轴固定板和第二x轴移动板,所述第一x轴移动板和第二x轴移动板一侧设置有用于驱动第一x轴移动板和第二x轴移动板沿x轴方向运动的x轴驱动气缸,
14.所述第一x轴移动板、第二x轴移动板、第一x轴固定板和第二x轴固定板上均设置有产品中转载具。
15.进一步的是:还包括第一y轴限位条、第二y轴限位条、第一x轴限位条和第二x轴限位条;
16.所述第一y轴限位条一端固定在第二x轴固定板上,第一y轴限位条另一端设置有第一腰型槽,所述第一x轴固定板上设置有第一凸起,所述第一凸起伸入第一腰型槽内;
17.所述第二y轴限位条一端固定在第二x轴移动板上,第二y轴限位条另一端设置有第二腰型槽,所述第一x轴移动板上设置有第二凸起,所述第二凸起伸入第二腰型槽内;
18.所述第一x轴限位条一端固定在第一x轴固定板上,第一x轴限位条另一端设置有第三腰型槽,所述第一x轴移动板上设置有第三凸起,所述第三凸起伸入第三腰型槽内;
19.所述第二x轴限位条一端固定在第二x轴固定板上,第二x轴限位条另一端设置有第四腰型槽,所述第二x轴移动板上设置有第四凸起,所述第四凸起伸入第四腰型槽内;
20.所述底板上还设置有机械手定位块。
21.进一步的是:所述满料盘输出流线包括输出架,所述输出架上设置有第二皮带传输线和驱动第二皮带传输线运动的驱动电机,所述输出架在第二皮带传输线运动方向的尾端设置有排出挡边,所述输出架两侧分别设置有料盘侧方挡边,所述第二皮带传输线侧面设置有用于检测料盘有无的光电传感器。
22.本发明的有益效果是:本结构通过满料盘输出流线、空料盘升降模组、工作料仓升降模组,料盘上料搬运机构、气缸定位机构、产品分距机构和机械手摆盘机构的协同合作,实现将多个电池触摸板分距至指定位置后再同步放置到料盘内,进而可实现一次性多个电池触摸板的上料操作,从而提高了上料速度和上料精准度。
附图说明
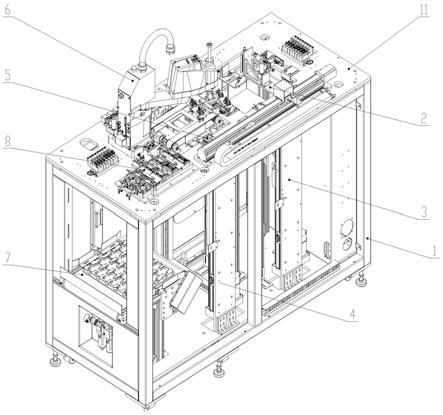
23.图1为本技术实施例的用于电池触摸板的自动摆盘机的示意图。
24.图2为本技术实施例的用于电池触摸板的自动摆盘机的料盘上料搬运机构示意图。
25.图3为本技术实施例的用于电池触摸板的自动摆盘机的工作料仓升降模组示意图。
26.图4为本技术实施例的用于电池触摸板的自动摆盘机的空料盘升降模组的示意图。
27.图5为本技术实施例的用于电池触摸板的自动摆盘机的气缸定位机构的示意图。
28.图6为本技术实施例的用于电池触摸板的自动摆盘机的机械手摆盘机构的示意图。
29.图7为本技术实施例的用于电池触摸板的自动摆盘机的产品分距机构的示意图。
30.图8为本技术实施例的用于电池触摸板的自动摆盘机的满料盘输出流线的示意图。
31.图中标记为:
32.1、机架;11、工作台面;
33.2、料盘上料搬运机构;21、第一安装架;22、升降气缸、23、吸盘安装板、24、第一真空吸盘组件;25、第五腰型槽;26、丝杆传动模组;
34.3、空料盘升降模组;31、第一承载板;32、第一伺服模组;
35.4、工作料仓升降模组;41、第二承载板;42、第二伺服模组;43、第一皮带传输线;
36.5、气缸定位机构;51、托举块;52、第一伸出驱动气缸;53、l型压块;54、第二伸出驱动气缸;
37.6、机械手摆盘机构;61、机械手本体;62、第二安装架;63、第二真空吸盘组件;
38.7、满料盘输出流线;71、输出架;72、第二皮带传输线;73、排出挡边;74、侧方挡边;75、光电传感器;
39.8、产品分距机构;81、底板;82、y轴移动板;83、y轴固定板;84、y轴驱动气缸;85、第一x轴固定板;86、第一x轴移动板;87、第二x轴固定板;88、第二x轴移动板;89、x轴驱动气缸;810、产品中转载具;811、第一y轴限位条;812、第二y轴限位条;813、第一x轴限位条;814、第二x轴限位条;815、机械手定位块。
具体实施方式
40.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
41.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
42.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
43.如图1所示,本技术的实施例公开了用于电池触摸板的自动摆盘机,包括机架1,所述机架1上表面为工作台面11,所述机架1内设置有满料盘输出流线7、空料盘升降模组3和工作料仓升降模组4。所述工作料仓升降模组4位于满料盘输出流线7一侧,工作料仓升降模组4可将料盘输出至满料盘输出流线7处,所述工作台面11上设置有分别与空料盘升降模组3和工作料仓升降模组4伸出的通口。
44.所述工作台面11上设置有用于将空料盘升降模组3上的料盘搬运至工作料仓升降
模组4处的料盘上料搬运机构2、用于对工作料仓升降模组4处的料盘进行定位的气缸定位机构5、用于对产品进行分距操作的产品分距机构8和用于将分距后的产品搬运至工作料仓升降模组4出的料盘内的机械手摆盘机构6。
45.具体的,机架1内位于空料盘升降模组3处设置有导向复制型材,可对空料盘的运动方向起到导向作用,防止空料盘在运动过程中坠落。
46.具体工作时,多盘空料盘堆叠放置在空料盘升降模组3内,空料盘升降模组3带动空料盘上升至工作台面11的通口处,工作料仓升降模组4运动至工作台面11的通口处,上料搬运机构将最上层的空料盘搬运至工作料仓升降模组4处并由气缸定位机构5对其进行定位操作,外部上一工位的夹爪将多个产品放置到产品分距机构8处,由产品分距机构8对其进行分距操作,分距完成后,机械手摆盘机构6按照产品分距机构8处个产品的位置同时抓取多个产品将其放置到工作料仓升降模组4处的料盘上,放置完成后,气缸定位机构5松开料盘,工作料仓升降模组4带动料盘下降至与满料盘输出流线7平齐,工作料仓升降模组4将满料盘输送至满料盘输出流线7上,满料盘输出流线7带动满料盘向前输送,最后由人工或机械手将该满料盘拿走。
47.本结构通过满料盘输出流线7、空料盘升降模组3、工作料仓升降模组4,料盘上料搬运机构2、气缸定位机构5、产品分距机构8和机械手摆盘机构6的协同合作,实现将多个电池触摸板分距至指定位置后再同步放置到料盘内,进而可实现一次性多个电池触摸板的上料操作,从而提高了上料速度和上料精准度。
48.本实施例中,如图2所示,所述料盘上料搬运机构2包括第一安装架21和驱动第一安装架21水平移动的丝杆传动模组26,所述第一安装架21上设置有升降气缸22,所述升降气缸22的驱动轴上设置有吸盘安装板23,所述吸盘安装板23上设置有多个第一真空吸盘组件24,还包括设置在第一安装架21上的用于与第一真空吸盘组件24连接的真空发生器。
49.在进行搬运料盘时,丝杆传动模组26先驱动吸盘安装板23运动至空料盘升降模组3位置处,升降气缸22驱动吸盘安装板23下降,接着真空发生器发生动作,使得第一真空吸盘组件24产生真空吸力,从而可将空料盘吸起,接着升降气缸22驱动吸盘安装板23上升,丝杆传动模组26驱动吸盘安装板23运动至工作料仓升降模组4并将其放下,从而完成整个的料盘搬运操作。
50.上述设置可方便快速的完成空料盘的上料操作。
51.本实施例中,所述吸盘安装板23上设置有多个第五腰型槽25,所述第一真空吸盘组件24安装在第五腰型槽25处。
52.具体的,上述真空吸盘通过螺栓拧紧在第五腰型槽25处。
53.当需要对真空吸盘的位置进行调整时,可以先拧松螺栓,将真空吸盘沿腰型槽调整位置,调整到位后,再用螺栓将真空吸盘拧紧,从而实现真空吸盘位置的调节。
54.上述腰型槽的设计可实现对真空吸盘位置的调整,从而使得该料盘上料搬运机构2可适应不同形状规格的料盘,从而可准确的对料盘实现搬运。
55.本实施例中,如图3和图4所示,所述空料盘升降模组3包括第一承载板31和驱动第一承载板31做升降运动的第一伺服模组32;
56.所述工作料仓升降模组4包括第二承载板41和驱动第二承载板41做升降运动的第二伺服模组42,所述第二承载板41上设置有传动机构,所述传动机构包括第一皮带传输线
43和驱动第一皮带传输线43转动的驱动电机。
57.工作时,先将堆叠后的空料盘放置到第一承载板31上,第一伺服模组32驱动第一承载板31向上运动,使得料盘上料搬运机构2可将最顶端的空料盘放置到第一皮带传输线43上,当空料盘被摆满料后,第二伺服模组42驱动第二承载板41下降,使得第一皮带传输线43的高度与满料盘输出流线7高度一致,驱动电机驱动第一皮带传输线43运动,使得满料盘被输送至满料盘输出流水线上,接着第二伺服模组42驱动第二承载板41复位,同时第一伺服模组32驱动第一承载板31继续向上运动输送下一个空料盘。
58.上述结构的设计可自动实现空料盘的上料和满料盘的下料操作,从而实现全自动化操作。
59.本实施例中,如图6所示,所述机械手摆盘机构6包括机械手本体61,所述机械手本体61的驱动轴处设置有第二安装架62,所述第二安装架62上设置有多个第二真空吸盘组件63,所述机械手本体61一侧还设置有与第二真空吸盘组件63连接的真空发生器。
60.具体的,上述机械手可选用四轴机器人。
61.具体工作时,机械手本体61控制第二安装架62上运动至分距机构处,真空发生器工作,使得第二真空吸盘组件63可将分距机构处的产品均吸起并在机械手本体61的控制下运送至工作料仓升降模组4处的空料盘内,实现产品的摆盘操作。
62.本实施例中,如图5所示,所述气缸定位机构5包括相对设置的2个对前后方向进行定位的第一定位机构和2个对左右方向进行定位的第二定位机构;
63.所述第一定位机构包括托举块51和驱动托举块51做伸出动作的第一伸出驱动气缸52,所述第二定位机构包括l型压块53和驱动l型压块53做伸出运动的第二伸出驱动气缸54。
64.具体工作时,当空料盘需要被放置到工作料仓升降模组4处时,第一伸出驱动气缸52驱动托举块51伸出,使得空料盘能被放置到托举块51处,接着第二伸出驱动气缸54驱动l型压块53做伸出运动压在空料盘的边缘处,实现对空料盘的压紧操作。
65.上述结构通过托举块51和l型压块53的配合使用可实现对空料盘的定位压紧操作,从而使得后续摆盘操作时,能对位准确,而不会出现因空料盘的移动而导致的产品无法摆盘准确的情况。
66.本实施例中,如图7所示,所述产品分距机构8包括底板81,所述底板81上分别设置有y轴移动板82和y轴固定板83,所述底板81上还设置有用于驱动y轴移动板82沿y轴方向运动的y轴驱动气缸84,所述y轴移动板82上设置有第一x轴固定板85和第一x轴移动板86,所述y轴固定板83上设置有第二x轴固定板87和第二x轴移动板88,所述第一x轴移动板86和第二x轴移动板88一侧设置有用于驱动第一x轴移动板86和第二x轴移动板88沿x轴方向运动的x轴驱动气缸89,
67.所述第一x轴移动板86、第二x轴移动板88、第一x轴固定板85和第二x轴固定板87上均设置有产品中转载具810。
68.具体工作时,产品被依次放置到产品中转载具810上,此时y轴驱动气缸84驱动y轴移动板82沿y轴方向运动,使得y轴移动板82和y轴固定板83产品产生指定分距位置,接着2个x轴驱动气缸89驱动第一x轴移动板86和第二x轴移动板88沿x轴方向运动,使得第一x轴移动板86和第二x轴移动板88到达指定位置,从而实现产品在两个方向完成分距操作,分距
完成后,等待机械手摆盘机构6将产品夹取放至料盘内。
69.上述机构的设置使得只需两侧3个气缸即可实现4块板的分距操作,从而可实现同时将多个产品按照料盘的格口设计同时放置多个产品到料盘内,从而实现快速摆盘操作。
70.本实施例中,还包括第一y轴限位条811、第二y轴限位条812、第一x轴限位条813和第二x轴限位条814;
71.所述第一y轴限位条811一端固定在第二x轴固定板87上,第一y轴限位条811另一端设置有第一腰型槽,所述第一x轴固定板85上设置有第一凸起,所述第一凸起伸入第一腰型槽内;
72.所述第二y轴限位条812一端固定在第二x轴移动板88上,第二y轴限位条812另一端设置有第二腰型槽,所述第一x轴移动板86上设置有第二凸起,所述第二凸起伸入第二腰型槽内;
73.所述第一x轴限位条813一端固定在第一x轴固定板85上,第一x轴限位条813另一端设置有第三腰型槽,所述第一x轴移动板86上设置有第三凸起,所述第三凸起伸入第三腰型槽内;
74.所述第二x轴限位条814一端固定在第二x轴固定板87上,第二x轴限位条814另一端设置有第四腰型槽,所述第二x轴移动板88上设置有第四凸起,所述第四凸起伸入第四腰型槽内;
75.所述底板81上还设置有机械手定位块815。
76.在具体进行分距操作时,当第一凸起从第一腰型槽的一端运动至另一端时,第一凸起无法再向前运动,即第一腰型槽对第一凸起到了定位作用,即实现了对第一x轴固定板85和第二x轴固定板87在y轴方向的限位,同理,第二凸起和第二腰型槽可实现对第一x轴移动板86和第二x轴移动板88在y轴方向的限位,第三凸起和第三腰型槽和实现对第一x轴固定板85和第一x轴移动板86在x轴方向上的限位,第四凸起和第四腰型槽可实现对第二x轴移动板88和第二x轴固定板87在x轴方向上的限位。
77.上述结构通过各个凸起和腰型槽的设计,可实现对分距位置进行精确控制,从而保证分距的准确性,从而使得分距后的产品能被准确的摆盘至料盘内,同时机械手定位块815的设置,由于机械手上设置有定位凹槽,可使得机械手在抓取时先定位在定位块上,再由机械手进行抓取,从而保证机械手抓取的准确性。
78.本实施例中,如图8所示,所述满料盘输出流线7包括输出架71,所述输出架71上设置有第二皮带传输线72和驱动第二皮带传输线72运动的驱动电机,所述输出架71在第二皮带传输线72运动方向的尾端设置有排出挡边73,所述输出架71两侧分别设置有料盘侧方挡边74,所述第二皮带传输线72侧面设置有用于检测料盘有无的光电传感器75。
79.具体的,光电传感器75和与下一机台或者外界报警器进行联动,用于提醒第二皮带传输线72上有料盘存在。
80.具体工作时,当满料盘被输出至第二皮带传输线72上后,驱动电机驱动第二皮带传输线72转动,第二皮带传输线72将料盘继续向前传输,当运输到尾端时,排出挡边73会对料盘进行阻挡,光电传感器75会检测到料盘的存在,从而人工或外部机械手可将满料盘取走。
81.上述结构的设置可使得人工在取走满料盘时,可远离工作台面11上的其他工作机
构,从而保证人工取满料盘时的安全性。
82.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。