1.本发明属于半导体芯片技术领域,具体涉及一种芯片转移结构。
背景技术:
2.半导体芯片:在半导体片材上进行浸蚀,布线,制成的能实现某种功能的半导体器件,不只是硅芯片,常见的还包括砷化镓(砷化镓有毒,所以一些劣质电路板不要好奇分解它),锗等半导体材料,半导体也像汽车有潮流,二十世纪七十年代,英特尔等美国企业在动态随机存取内存(d-ram)市场占上风,但由于大型计算机的出现,需要高性能d-ram的二十世纪八十年代,日本企业名列前茅。
3.半导体芯片的发展是朝着晶圆大尺寸化和芯片微型化方向发展,这就导致了在一片晶圆上生产数量巨大的数以几十万、上百万计的微型化芯片,这些微型芯片在制作完成之后,需要根据应用需求进行分类并转移到其他载体上,由于微型芯片数量巨大,转移技术要求高良品率、高精度和高效率,现有的芯片分选技术效率低、速度慢,很难适应这一技术发展趋势,也在很大程度上限制了半导体芯片技术的进步和应用拓展,因此,设计并制作出一套高效率、高良品率和高精度的芯片转移装置具有重要的意义。
技术实现要素:
4.针对现有技术存在的不足,本发明目的是提供一种芯片转移结构,解决了制作出一种经济实用、高效率、高良品率和高精度的芯片转移装置结构的问题。
5.为实现上述目的,本发明提供如下技术方案:一种芯片转移结构,包括转移机构、支撑机构、箱体和移动机构,所述转移机构包括放卷轮、导向轮、辊压轮、拉伸轮、离心纸轮、收卷轮、aoi计数器、芯片、贴合轮和光源,所述放卷轮的外侧绕接有机膜材,所述aoi计数器活动安装在箱体的内部,所述离心纸轮、收卷轮和贴合轮呈三角态势分布,所述拉伸轮位于贴合轮和辊压轮的一侧,所述辊压轮位于导向轮的一侧,所述导向轮位于放卷轮的一侧,所述光源和收卷轮位于放卷轮的相对侧。
6.所述支撑机构包括安装座,所述安装座的底部螺纹连接有螺栓柱,所述螺栓柱的底端螺纹连接有锥形框,所述锥形框的底部固定安装有软垫。
7.所述箱体的一侧开设有入料口,所述箱体的正面活动安装有两个箱门,两个所述箱门的内部均活动安装有玻璃板,所述箱体的内部活动安装有第一除静电棒,所述箱体的内部活动安装有第二除静电棒,所述箱体的内部活动安装有第三除静电棒,所述箱体的内部活动安装有纠偏传感器。
8.所述移动机构包括导轨槽,所述导轨槽的内部活动安装有两个电动导轨,两个电动导轨的一侧固定安装有支板,所述支板的顶部活动安装有调节架,所述调节架的顶部活动安装有载片台,所述载片台的顶部活动安装有载片吸盘。
9.优选的,所述支撑机构的数量为四组,且四个安装座均通过螺栓固定在箱体的底部。
10.通过采用上述技术方案,优点在于锥形框及其底部的软垫可以少许调节高度,便于在为箱体提供支撑的同时,避免了地面不平的问题增加了使用的便利性。
11.优选的,所述导轨槽的数量为两组,所述入料口的位置与移动机构的位置相对应。
12.通过采用上述技术方案,优点在于导轨槽的内部电动导轨进行移动,使其沿着导轨槽的固定位置移动以便带动支板和顶部的载片台以及载片吸盘进行移动,便于将芯片带到合适位置。
13.优选的,所述第一除静电棒离心纸轮、收卷轮和贴合轮的连接处,所述第二除静电棒位于拉伸轮的内侧,所述第三除静电棒位于导向轮的底部,所述纠偏传感器位于导向轮和辊压轮之间。
14.通过采用上述技术方案,优点在于多点位的除静电棒,第一除静电棒、第二除静电棒和第三除静电棒将多个可能产生摩擦和生成静电的点位进行消除静电,避免了产生静电对芯片的损害。
15.优选的,所述有机膜材抵触在导向轮、辊压轮的底部,所述有机膜材绕接在拉伸轮的外侧,所述有机膜材绕接在贴合轮的外侧,且有机膜材绕接在收卷轮的外侧,所述放卷轮、导向轮、辊压轮、拉伸轮和离心纸轮均通过轴座安装在箱体的内部。
16.通过采用上述技术方案,优点在于放卷轮、导向轮、辊压轮、拉伸轮和离心纸轮通过轴座活动转动力矩和支撑位置,同时也可以根据实际情况更换支撑结构,例如辊压轮可以提供可移动的支撑结构,便于配合作业。
17.优选的,所述收卷轮一端的外侧活动套接有轴承,所述轴承的外侧固定安装在箱体的侧壁,所述收卷轮的一端固定安装有电机,所述电机的外侧安装有支架,所述支架的一端固定安装在箱体的外侧。
18.通过采用上述技术方案,优点在于当电机转动时,通过支架的作用获得转动力矩,并带动收卷轮转动,收卷轮在轴承的支撑作用下转动,使得有机膜材和离心纸进行贴合收卷,该方案为收卷轮提供了转动力矩。
19.优选的,所述光源为紫外光、激光或非相干光的一种,且光斑的大小和位置可以通过计算机或其他的控制部件进行控制,能够与芯片位置对准,使所选择的芯片处于自由状态。
20.通过采用上述技术方案,优点在于光源是紫外光或其他形式的光,通过自动控制光源光亮的辐照在载片台粘合剂与芯片处可以选择性的使得对应芯片处于相对自由的状态。
21.优选的,所述aoi计数器为图像识别装置,且扫描仪扫描图像具有自动识别功能,可判断出所选芯片的正确与否。
22.通过采用上述技术方案,优点在于通过ccd光学成像与图像识别对准标识,使粘性有机膜移动位置与待选芯片位置对准。
23.优选的,所述箱体的一侧活动安装有人机交互面板,所述人机交互面板包括显示屏、电路板、微处理器和操作按钮。
24.通过采用上述技术方案,优点在于人机交互面板可以为装置提供一个自动化控制方案,例如作业人员按动操作按钮通过微处理器和电路板下达作业指令,并通过显示屏观察作业的位置和情况,增加了自动化智能控制程度。
25.与现有技术相比,本发明的有益效果是:
26.1、通过具有粘性的有机膜材在这种机械结构的输送和辊压作用下,将半导体芯片从一个载体转移到另一个载体上,这种机械结构具有若干个传动轮和辊压轮;能把分装在不同载体上的半导体芯片转移到同一卷粘性有机膜材上,并且这种转移具有一定的选择性,进行选择的方法是通过紫外光或其它光的作用让要选择的芯片处于相对自由的状态;这种机械结构具有光学对准系统,通过ccd光学成像与图像识别对准标识,使粘性有机膜移动位置与待选芯片位置对准;这种机械机构可以将已选择芯片传输到光学自动扫描仪之下,通过扫描仪来检查所需选芯片的正确性及所选芯片的数量。
27.2、通过采用卷对卷连续工作的方式实施转移,通过光作用选择性释放芯片,精度高,容易控制,且可以满足快速作业的需求,并且操作难度小,有别于传统的作业方式,使用效果好。
28.3、通过设置的安装座,安装座安装在箱体底部时,当转动锥形框使其可以沿着螺栓柱外侧的螺纹契合转动,使得锥形框及其底部的软垫可以少许调节高度,便于在为箱体提供支撑的同时,避免了地面不平的问题增加了使用的便利性。
附图说明
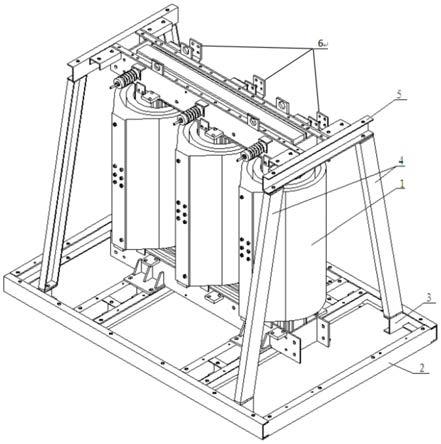
29.图1为本发明的前视立体外观结构示意图;
30.图2为本发明的后视立体外观结构示意图;
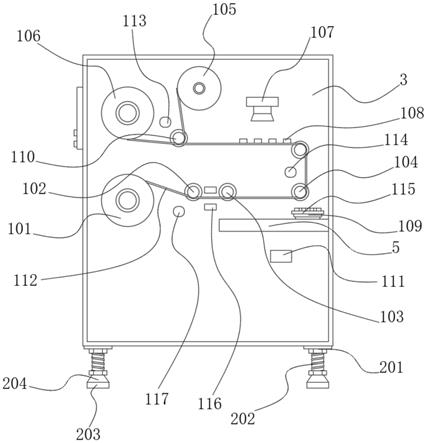
31.图3为本发明的前视隐去箱门结构示意图;
32.图4为本发明的前视局部剖视结构示意图;
33.图5为本发明的右视外观结构示意图;
34.图6为本发明的支撑机构局部剖视结构示意图;
35.图7为本发明的图4中a处放大结构示意图。
36.图中:1、转移机构;101、放卷轮;102、导向轮;103、辊压轮;104、拉伸轮;105、离心纸轮;106、收卷轮;107、aoi计数器;108、芯片;109、载片台;110、贴合轮;111、光源;112、有机膜材;113、第一除静电棒;114、第二除静电棒;115、载片吸盘;116、纠偏传感器;117、第三除静电棒;2、支撑机构;201、安装座;202、螺栓柱;203、软垫;204、锥形框;3、箱体;301、入料口;302、玻璃板;303、箱门;4、电机;401、支架;402、轴承;5、移动机构;501、导轨槽;502、电动导轨;503、支板;504、调节架;6、人机交互面板。
具体实施方式
37.下面将结合本发明实施方案中的附图,对本发明实施方案中的技术方案进行清楚、完整地描述,显然,所描述的实施方案仅仅是本发明一部分实施方案,而不是全部的实施方案。基于本发明中的实施方案,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方案,都属于本发明保护的范围。
38.如图1-图7所示,一种芯片转移结构,包括转移机构1、支撑机构2、箱体3和移动机构5,转移机构1包括放卷轮101、导向轮102、辊压轮103、拉伸轮104、离心纸轮105、收卷轮106、aoi计数器107、芯片108、贴合轮110和光源111,放卷轮101的外侧绕接有机膜材112,aoi计数器107活动安装在箱体3的内部,离心纸轮105、收卷轮106和贴合轮110呈三角态势
分布,拉伸轮104位于贴合轮110和辊压轮103的一侧,辊压轮103位于导向轮102的一侧,导向轮102位于放卷轮101的一侧,光源111和收卷轮106位于放卷轮101的相对侧。
39.支撑机构2包括安装座201,安装座201的底部螺纹连接有螺栓柱202,螺栓柱202的底端螺纹连接有锥形框204,锥形框204的底部固定安装有软垫203。
40.箱体3的一侧开设有入料口301,箱体3的正面活动安装有两个箱门303,两个箱门303的内部均活动安装有玻璃板302,箱体3的内部活动安装有第一除静电棒113,箱体3的内部活动安装有第二除静电棒114,箱体3的内部活动安装有第三除静电棒117,箱体3的内部活动安装有纠偏传感器116。
41.移动机构5包括导轨槽501,导轨槽501的内部活动安装有两个电动导轨502,两个电动导轨502的一侧固定安装有支板503,支板503的顶部活动安装有调节架504,调节架504的顶部活动安装有载片台109,载片台109的顶部活动安装有载片吸盘115。
42.上述技术方案的工作原理如下:
43.有机膜材112是带有粘性的有机物膜材,该有机膜材112固定在放卷轮101上,并通过放卷轮101进行放卷,然后利用导向轮102和拉伸轮104将有机膜材112撑平,芯片108是半导体芯片,芯片108通过粘结剂固定在载片台109上,光源111是紫外光或其他形式的光,通过光源111的辐照可以选择性的让芯片108处于相对自由的状态,待到选择的芯片108处于相对自由状态后,通过辊压轮103的辊压,将相对自由状态的已选择芯片108粘附在有机膜材112上,当已选择芯片108传输到aoi计数器107之下时,通过aoi计数器107来检查所选芯片108的正确性及所选芯片108的数量,离心纸轮105是放离心纸卷轮,通过贴合轮110将黏附已选择芯片108的有机膜材112与离心纸贴合到一起,离心纸对已选择芯片108起到保护作用,最后通过收卷轮106将有机膜材112与离心纸双层膜进行收卷。
44.在另外一个实施方案中,如图1-图6所示,支撑机构2的数量为四组,且四个安装座201均通过螺栓固定在箱体3的底部。
45.安装座201安装在箱体3底部时,当转动锥形框204使其可以沿着螺栓柱202外侧的螺纹契合转动,使得锥形框204及其底部的软垫203可以少许调节高度,便于在为箱体3提供支撑的同时,避免了地面不平的问题增加了使用的便利性。
46.在另外一个实施方案中,如图3-图5所示,导轨槽501的数量为两组,入料口301的位置与移动机构5的位置相对应。
47.导轨槽501的内部电动导轨502进行移动,使其沿着导轨槽501的固定位置移动以便带动支板503和顶部的载片台109以及载片吸盘115进行移动,便于将芯片108带到合适位置,并使其黏附在有机膜材112的外侧,入料口301便于移动机构5的拿取及装入载片吸盘115转移的芯片108,同时移动机构5安装在箱体3内部。
48.在另外一个实施方案中,如图3和图4所示,第一除静电棒113离心纸轮105、收卷轮106和贴合轮110的连接处,第二除静电棒114位于拉伸轮104的内侧,第三除静电棒117位于导向轮102的底部,纠偏传感器116位于导向轮102和辊压轮103之间。
49.多点位的除静电棒,第一除静电棒113、第二除静电棒114和第三除静电棒117将多个可能产生摩擦和生成静电的点位进行消除静电,避免了产生静电对芯片108的损害,而纠偏传感器116将有机膜材112的移动位置进行监测,避免错位时芯片108粘合不牢固产生掉落的问题。
50.在另外一个实施方案中,如图3和图4所示,有机膜材112抵触在导向轮102、辊压轮103的底部,有机膜材112绕接在拉伸轮104的外侧,有机膜材112绕接在贴合轮110的外侧,且有机膜材112绕接在收卷轮106的外侧,放卷轮101、导向轮102、辊压轮103、拉伸轮104和离心纸轮105均通过轴座安装在箱体3的内部。
51.有机膜材112固定在放卷轮101上,并通过放卷轮101进行放卷,然后利用导向轮102和拉伸轮104将有机膜材112撑平,待到选择的芯片108处于相对自由状态后,通过辊压轮103的辊压,将相对自由状态的已选择芯片108粘附在有机膜材112上,并传动到收卷轮106使得作业机构形成一个流程,而放卷轮101、导向轮102、辊压轮103、拉伸轮104和离心纸轮105通过轴座活动转动力矩和支撑位置,同时也可以根据实际情况更换支撑结构,例如辊压轮103可以提供可移动的支撑结构,便于配合作业。
52.在另外一个实施方案中,如图2和图5所示,收卷轮106一端的外侧活动套接有轴承402,轴承402的外侧固定安装在箱体3的侧壁,收卷轮106的一端固定安装有电机4,电机4的外侧安装有支架401,支架401的一端固定安装在箱体3的外侧。
53.当电机4转动时,通过支架401的作用获得转动力矩,并带动收卷轮106转动,收卷轮106在轴承402的支撑作用下转动,使得有机膜材112和离心纸进行贴合收卷,该方案为收卷轮106提供了转动力矩。
54.在另外一个实施方案中,如图3和图4所示,光源111为紫外光、激光或非相干光的一种,且光斑的大小和位置可以通过计算机或其他的控制部件进行控制,能够与芯片108位置对准,使所选择的芯片108处于自由状态。
55.光源111是紫外光或其他形式的光,通过自动控制光源111光亮的辐照在载片台109粘合剂与芯片108处可以选择性的使得对应芯片108处于相对自由的状态,待到选择的芯片108处于相对自由状态后,可由有机膜材112进行粘合。
56.在另外一个实施方案中,如图3和图4所示,aoi计数器107为图像识别装置,且扫描仪扫描图像具有自动识别功能,可判断出所选芯片108的正确与否。
57.该图像识别装置,通过ccd光学成像与图像识别对准标识,使粘性有机膜移动位置与待选芯片108位置对准,这种机械机构可以将已选择芯片108传输到光学自动扫描仪之下,通过扫描仪来检查所需选芯片108的正确性及所选芯片108的数量。
58.在另外一个实施方案中,如图2所示,箱体3的一侧活动安装有人机交互面板6,人机交互面板6包括显示屏、电路板、微处理器和操作按钮。
59.人机交互面板6可以为装置提供一个自动化控制方案,例如作业人员按动操作按钮通过微处理器和电路板下达作业指令,并通过显示屏观察作业的位置和情况,增加了自动化智能控制程度,人机交互面板6的输出端通过导线与电机4、第一除静电棒113、第二除静电棒114、第三除静电棒117、电动导轨502的输入端电性连接,人机交互面板6的输入端通过导线与aoi计数器107和纠偏传感器116的输出端电性连接。
60.本发明的工作原理及使用流程:作业时,芯片108可根据使用需求通过载片吸盘115固定在载片台109的顶部,并且载片吸盘115可拆,而后通过人机交互面板6操控设备,此时电动导轨502移动带动支板503和调节架504移动,调节架504为可调节高度结构,将芯片108移动到辊压轮103的底部,而后电机4转动在支架401的作用下带动收卷轮106转动,收卷轮106在轴承402的作用下转动,并将有机膜材112和离心纸进行贴合收卷,有机膜材112是
带有粘性的有机物膜材,该有机膜材112固定在放卷轮101上,并通过放卷轮101进行放卷,然后利用导向轮102和拉伸轮104将有机膜材112撑平,芯片108是半导体芯片,芯片108通过粘结剂固定在载片台109上,光源111是紫外光或其他形式的光,通过光源111的辐照可以选择性的让芯片108处于相对自由的状态,待到选择的芯片108处于相对自由状态后,通过辊压轮103的辊压,将相对自由状态的已选择芯片108粘附在有机膜材112上,当已选择芯片108传输到aoi计数器107之下时,通过aoi计数器107来检查所选芯片108的正确性及所选芯片108的数量,离心纸轮105是放离心纸卷轮,通过贴合轮110将黏附已选择芯片108的有机膜材112与离心纸贴合到一起,离心纸对已选择芯片108起到保护作用,最后通过收卷轮106将有机膜材112与离心纸双层膜进行收卷。
61.尽管已经示出和描述了本发明的实施方案,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施方案进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。