用于自动化鞋类平台的系带架构
1.本技术是申请日为2017年3月14日、申请号为201780079477.5、发明名称为“用于自动化鞋类平台的系带架构”的发明专利申请的分案申请。
2.优先权要求
3.本技术要求于2016年11月18日提交的序列号为62/424,294的美国临时专利申请以及于2016年10月26日提交的序列号为62/413,142的美国临时专利申请的优先权利益,其各自的优先权利益在此被要求保护,并且其各自通过引用以其整体并入本文。
4.以下说明书描述了鞋类组件的各个方面,涉及包括机动化系带引擎(motorized lacing engine)或非机动化系带引擎的系带系统、与系带引擎相关的鞋类部件、自动化系带鞋类平台以及相关的制造工艺。更具体地,以下说明书大部分描述了用于鞋类的系带架构(配置)的各个方面,包括用于集中式鞋带收紧(centralized lace tightening)的机动化系带引擎或非机动化系带引擎。
5.附图简述
6.在附图中,这些附图不一定按比例绘制,相似的数字可以在不同的视图中描述相似的部件。具有不同字母后缀的相似数字可以代表相似部件的不同实例。附图以示例而非限制的方式总体上图示了本文件中讨论的多种实施方案。
7.图1是分解视图,图示了根据一些示例实施方案的具有机动化系带系统的鞋类组件的一部分的部件。
8.图2是俯视图,图示了根据一些示例实施方案的用于与包括机动化系带引擎的鞋类组件一起使用的系带架构。
9.图3a-3c是俯视图,图示了根据一些示例实施方案的平坦的鞋类鞋面,该平坦的鞋类鞋面具有用于包括机动化系带引擎的鞋类组件中的系带架构。
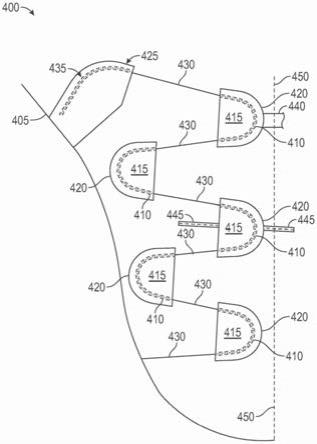
10.图4是图示根据一些示例实施方案的鞋类鞋面的一部分的图,该鞋类鞋面具有用于包括机动化系带引擎的鞋类组件中的系带架构。
11.图5是图示根据一些示例实施方案的鞋类鞋面的一部分的图,该鞋类鞋面具有用于包括机动化系带引擎的鞋类组件中的系带架构。
12.图6是图示根据一些示例实施方案的鞋类鞋面的一部分的图,该鞋类鞋面具有用于包括机动化系带引擎的鞋类组件中的系带架构。
13.图7a-7b是图示根据一些示例实施方案的鞋类鞋面的一部分的图,该鞋类鞋面具有用于包括机动化系带引擎的鞋类组件中的系带架构。
14.图7c-7d是图示根据一些示例实施方案的用于鞋类组件中的可变形鞋带引导件的图。
15.图7e是曲线图,图示了根据一些示例实施方案的可变形鞋带引导件的多种扭矩相对于鞋带位移的曲线。
16.图8a-8g是图示根据一些示例实施方案的用于某些系带架构的系带引导件的图。
17.图9是流程图,图示了根据一些示例实施方案的用于组装包括系带引擎的鞋类的鞋类组装工艺。
18.图10是流程图,图示了根据一些示例实施方案的用于组装包括系带引擎的鞋类的鞋类组装工艺。
19.本文提供的任何标题仅仅是为了方便,并且不一定影响所使用的术语或者标题下的讨论的范围或含义。
20.详细描述
21.通过早在1989年上映的电影《回到未来ii》中marty mcfly穿的虚构的动力系带运动鞋,自收紧鞋带的构思被首次广泛推广。尽管后来已经发布了至少一个版本的外观上类似于来自《回到未来ii》的电影道具版本的动力系带运动鞋,但采用的内部机械系统和周围的鞋类平台却未必适合大规模生产或日常使用。此外,其它先前用于机动化系带系统的设计相比较地面临着问题,诸如高制造成本、复杂性、组装挑战以及差的可维修性。本发明人开发了模块化鞋类平台以容纳机动化和非机动化的系带引擎,除了其他问题之外,该模块化鞋类平台解决了以上讨论的一些或全部问题。为了充分利用以下简要地且在标题为“lacing apparatus for automated foorwear platform”的序列号为62/308,686的共同未决的申请中较详细地讨论的模块化系带引擎,本发明人开发了本文讨论的系带架构。本文讨论的系带架构可以解决集中式鞋带收紧机构所经历的多种问题,例如不均匀的收紧、贴合性、舒适性和性能。该系带架构提供了多种益处,包括跨过较大的鞋带行进距离使鞋带张力平滑以及在保持贴合性能的同时增强舒适性。增强的舒适性的一个方面涉及系带架构,该系带架构降低了跨过足部的顶部的压力。示例系带架构还可以通过在内侧-外侧方向以及在前后(从前到后)方向两者上操纵鞋带张力增强贴合性和性能。对于相关领域的技术人员来说,以下描述的部件的多种其他益处将是明显的。
22.所讨论的系带架构被特定地开发以与定位在鞋类组件的鞋底夹层部分内的模块化系带引擎交互。然而,这些构思也可以应用于布置在鞋类周围的各个位置中的机动化系带机构和手动系带机构,例如在鞋类平台的鞋跟部分或甚至鞋尖部分中。所讨论的系带架构包括鞋带引导件的使用,该鞋带引导件可以由管状塑料、金属夹具、织物环或通道、塑料夹具和开口u形通道以及其他形状和材料形成。在一些示例中,多种不同类型的系带引导件可以被混合,以在系带架构内进行特定的鞋带路线安排功能。
23.以下讨论的机动化系带引擎被从头开始开发以为自动化系带鞋类平台提供稳固、可维修且可更换的部件。系带引擎包括独特的设计元素,该设计元素能够实现到模块化鞋类平台中的零售级最终组装(retail-level final assembly)。系带引擎设计允许大部分鞋类组装工艺利用已知的组装技术,其中对标准组装工艺的独特适应仍然能够利用当前的组装资源。
24.在示例中,模块化自动化系带鞋类平台包括固定到鞋底夹层的鞋底夹层板,以用于接纳系带引擎。鞋底夹层板的设计允许系带引擎最晚在购买时被放入到鞋类平台中。鞋底夹层板和模块化自动化鞋类平台的其他方面允许不同类型的系带引擎被可替换地使用。例如,以下讨论的机动化系带引擎可以被更改为人力系带引擎。可选择地,具有足部存在感测或其他可选特征的全自动机动化系带引擎可以被容纳在标准鞋底夹层板内。
25.利用机动化或非机动化的集中式系带引擎收紧运动鞋类在提供足够的性能而不牺牲一定量的舒适性方面存在一些挑战。本文讨论的系带架构已经被特定地设计成用于与集中式系带引擎一起使用,并且被设计成能够实现从休闲到高性能的多种鞋类设计。
26.此初始概述旨在介绍本专利申请的主题。这不意图提供对以下更详细的描述中公开的各个发明的排他性或穷尽性解释。
27.自动化鞋类平台
28.以下讨论自动化鞋类平台的各个部件,包括机动化系带引擎、鞋底夹层板以及平台的各个其它部件。虽然本公开大部分集中于用于与机动化系带引擎一起使用的系带架构,但所讨论的设计可应用于人力系带引擎或具有另外或更少能力的其它机动化系带引擎。因此,如在“自动化鞋类平台(automated footwear platform)”中使用的术语“自动化”并不旨在仅仅包含无需用户输入操作的系统。相反,术语“自动化鞋类平台”包括各种用于收紧鞋类系带系统或保持系统的电动的以及人力自动激活的和人力激活的机构。
29.图1是分解视图,图示了根据一些示例实施方案的用于鞋类的机动化系带系统的部件。图1中所图示的机动化系带系统1包括系带引擎10、盖20、致动器30、鞋底夹层板40、鞋底夹层50和鞋外底60。图1图示了自动化系带鞋类平台的部件的基本组装顺序。机动化系带系统1以将鞋底夹层板40固定在鞋底夹层内开始。接下来,致动器30被插入到鞋底夹层板的外侧中的开口中,与可以嵌入在鞋外底60中的接口按钮相对。接下来,系带引擎10落入鞋底夹层板40中。在示例中,系带系统1被插入在系带缆线的连续环下,并且系带缆线与系带引擎10中的线轴对齐(下面讨论)。最后,盖20被插入到鞋底夹层板40中的凹槽中、被固定到闭合位置中并且被锁定到鞋底夹层板40中的凹部中。盖20可以捕获系带引擎10,并且可以在操作期间帮助保持系带缆线的对齐。
30.在示例中,鞋类物品或机动化系带系统1包括可以监测或确定足部存在特性的一个或更多个传感器或被配置成与该一个或更多个传感器交互。基于来自一个或更多个足部存在传感器的信息,包括机动化系带系统1的鞋类可以被配置为进行多种功能。例如,足部存在传感器可以被配置为提供关于鞋类中是否存在足部的二进制信息。如果来自足部存在传感器的二进制信号指示足部存在,那么机动化系带系统1可以被激活,诸如自动地收紧或放松(即,松开)鞋类系带缆线。在示例中,鞋类物品包括处理器电路,该处理器电路可以接收或解译来自足部存在传感器的信号。处理器电路可以可选地嵌入在系带引擎10中或与系带引擎10嵌在一起,诸如嵌入在鞋类物品的鞋底中。
31.系带架构
32.图2是根据一些示例实施方案的鞋面200的俯视图,示出了示例系带配置。在该示例中,除了鞋带210和系带引擎10之外,鞋面205包括外侧鞋带固定件215、内侧鞋带固定件216、外侧鞋带引导件222、内侧鞋带引导件220和布里奥缆线(brio cable)225。图2中所图示的示例包括连续的针织织物鞋面205,其具有包括不重叠的内侧系带路径和外侧系带路径的斜线系带图案(diagonal lacing pattern)。系带路径这样形成:始于外侧鞋带固定件215,行进穿过外侧鞋带引导件222,穿过系带引擎10,向上穿过内侧鞋带引导件220,回到内侧鞋带固定件216。在该示例中,鞋带210形成从外侧鞋带固定件215到内侧鞋带固定件216的连续环。在该示例中,内侧到外侧的收紧通过布里奥缆线225传输。在其他示例中,系带路径可以交错(crisscross),或结合另外的特征,以跨过鞋面205在内侧-外侧方向上传输收紧力。此外,连续鞋带环的概念可以结合到具有中央(内侧)间隙并且鞋带210跨过中央间隙前后交错的更传统的鞋面中。
33.图3a-3c是俯视图,图示了根据一些示例实施方案的平坦的鞋类鞋面305,该平坦
的鞋类鞋面305具有用于包括机动化系带引擎的鞋类组件中的系带架构300。为了讨论示例鞋类鞋面的目的,鞋面305被假设为被设计成用于结合到右足部形态的鞋类组件中。图3a是具有所图示的系带架构300的平坦的鞋类鞋面305的俯视图。在该示例中,鞋类鞋面305包括一系列鞋带引导件320a-320j(统称为鞋带引导件320),其中鞋带缆线310行进穿过这些鞋带引导件320。在该示例中,鞋带缆线310形成环,该环在鞋面305的每一侧上分别终止于外侧鞋带固定件345a和内侧鞋带固定件345b(统称为鞋带固定点345)处,其中环的中间部分的路线被规定成穿过鞋类组件的鞋底夹层内的系带引擎。鞋面305还包括与一系列鞋带引导件320中的每一个相关联的加强件。加强件可以叠加在单个鞋带引导件上或跨越多个鞋带引导件。在该示例中,加强件包括中央加强件325、第一外侧加强件335a、第一内侧加强件335b、第二外侧加强件330a、第二内侧加强件330b。鞋带缆线310的中间部分的路线经由外侧后鞋带引导件315a和内侧后鞋带引导件315b被引导到系带引擎和/或从系带引擎被引导,并且通过外侧鞋带出口340a和内侧鞋带出口340b离开和/或进入鞋面300。
34.鞋面305可以包括不同的部分,例如鞋前部(鞋尖)部分307、鞋中部部分308和鞋跟部分309。鞋前部部分307对应于连接足部的跖骨和趾骨的关节。鞋中部点308可以对应于足部的足弓区域。鞋跟部分309可以对应于足部的后部部分或脚跟部分。鞋面305的鞋中部部分的内侧和外侧可以包括中央部分306。在一些常见的鞋类设计中,中央部分306可以包括由鞋带的交错(或类似)图案跨越的开口,该开口允许调节鞋类鞋面围绕足部的贴合性。包括开口的中央部分306还有助于足部进入鞋类组件和从鞋类组件中移除。
35.鞋带引导件320是管状结构或通道结构,以保持鞋带缆线310,同时沿着鞋面305的外侧和内侧中的每一个将鞋带缆线310的路线规定成穿过图案。在该示例中,鞋带引导件320是以基本上正弦波图案布局的u形塑料管,其沿着鞋面305的内侧和外侧上下循环。由鞋带缆线310完成的循环数可以根据鞋尺寸变化。较小尺寸的鞋类组件可以仅仅能够容纳一又二分之一个循环,其中示例鞋面305在进入内侧后鞋带引导件315b或外侧后鞋带引导件315a之前容纳二又二分之一个循环。图案被描述为基本上正弦的,因为至少在此示例中,u形引导件具有比真实的正弦波峰或波谷更宽的轮廓。在其他示例中,可以利用更接近真实正弦波图案的图案(在不大量使用精心弯曲的鞋带引导件的情况下,在鞋带引导件之间拉伸的鞋带不容易获得真实的正弦波)。鞋带引导件320的形状可以变化,以产生不同的扭矩相对于鞋带位移的曲线,其中扭矩在鞋的鞋底夹层中的系带引擎处被测量。使用具有较小半径曲线的鞋带引导件,或包括较高频率的波形图案(例如,具有更多鞋带引导件的更大的循环数),可以导致扭矩相对于鞋带位移的曲线的变化。例如,具有较小半径的鞋带引导件,鞋带缆线经历较高的摩擦,这可能导致较高的初始扭矩,这可能看起来使扭矩相对于鞋带位移的曲线趋于平滑。然而,在某些实施方式中,可能更合意的是,保持低的初始扭矩水平(例如,通过将鞋带引导件内的摩擦保持低),同时利用鞋带引导件放置图案或鞋带引导件设计来帮助使扭矩相对于鞋带位移的曲线平滑。参考图7a和图7b讨论了一种这样的鞋带引导件设计,其中参考图8a至图8g讨论了另一种可选择的鞋带引导件设计。除了参考这些图讨论的鞋带引导件之外,鞋带引导件可以由塑料、聚合物、金属或织物制造。例如,织物的层可以用于产生成形的通道,以使鞋带缆线的路线规定成期望的图案。如以下所讨论的,塑料引导件或金属引导件和织物叠加物的组合可以用于产生引导件部件以用于所讨论的系带架构。
36.返回到图3a,加强件325、335和330被图示成与不同的鞋带引导件例如鞋带引导件320相关联。在示例中,加强件335可以包括浸渍有热活化粘合剂的织物,该热活化粘合剂可以粘合在鞋带引导件320g、320h的顶部上方,这种工艺有时被称为热熔(hot melt)。加强件可以叠加在多个鞋带引导件上,例如加强件325,在该示例中,加强件325叠加在邻近鞋类的中央部分(例如中央部分306)定位的六个鞋面鞋带引导件上。在另一个示例中,加强件325可以沿中央部分306的中间被分开,以形成叠加在沿着中央部分306的内侧的鞋带引导件上和叠加在沿着中央部分306的外侧的鞋带引导件上的两个块,沿着中央部分306的内侧的鞋带引导件与沿着中央部分306的外侧的鞋带引导件分开。在又另一个可选择的示例中,加强件325可以被分成叠加在各个鞋带引导件上的六个单独的加强件。加强件的用途可以变化,以改变鞋带引导件和下面的鞋类鞋面(例如鞋面305)之间的相互作用动力学。加强件也可以以多种其他方式粘合到鞋面305,包括缝纫、粘合剂或机构的组合。粘合加强件的方式连同用于加强件的织物或材料的类型也可以影响行进穿过鞋带引导件的鞋带缆线所经历的摩擦。例如,在另外的柔性鞋带引导件上方热熔的更刚性的材料可以增加鞋带缆线所经历的摩擦。相反,粘合在鞋带引导件上方的柔性材料可以通过将更多的鞋带引导件保持柔性而降低摩擦。
37.如以上所提及的,图3a图示了中央加强件325,该中央加强件325是跨越内侧和外侧鞋面鞋带引导件(320a、320b、320e、320f、320i和320j)的单个构件。假设加强件325是比下面的鞋类鞋面(在本示例中鞋面305)具有更小柔性的更刚性的材料,所得到的鞋类组件的中央部分306将呈现出较不宽松的贴合特性。在一些应用中,较刚性的、较不宽松的中央部分306可能是合意的。然而,在其中跨过中央部分306需要较大的柔性的应用中,中央加强件325可以被分开成两个或更多个加强件。在某些应用中,分开的中央加强件可以使用多种柔性材料或弹性材料跨过中央部分306联接,以实现更适体的中央部分306。在一些示例中,鞋面305可以具有小的间隙,该小的间隙沿中央部分306的长度延伸,其中一个或更多个弹性构件跨越该间隙并且连接多个中央加强件,例如在图4中以鞋带引导件410和弹性构件440至少部分地图示出。
38.图3b是具有所图示的系带架构300的平坦的鞋类鞋面305的另一俯视图。在该示例中,鞋类鞋面305包括对加强件325、330和335的配置修改后的包括鞋带引导件320的类似的鞋带引导件图案。如以上所讨论的,对加强件配置的修改将导致至少稍微不同的贴合特性,并且还可以改变扭矩相对于鞋带位移的曲线。
39.图3c是根据示例实施方案的在平坦的鞋类鞋面上图示的一系列系带架构示例。鞋带架构300a图示了类似于参考图3a讨论的正弦波图案的鞋带引导件图案,其中每个单独的鞋带引导件分别叠加有单独的加强件。鞋带架构300b再次图示了波形系带图案(wave lacing pattern),也称为降落伞式系带(parachute lacing),其中长形的加强件叠加在横跨中央部分的上部鞋带引导件对和单独的下部鞋带引导件上。鞋带架构300c是具有单个中央加强件的又一种波形系带图案。鞋带架构300d引入三角形鞋带图案,其中切成合适形状的单独的加强件配合在单独的鞋带引导件上。鞋带架构300e图示了呈三角形鞋带图案的加强件配置的变型。最后,鞋带架构300f图示了加强件配置的另一种变型,包括中央加强件和加固的下部加强件。
40.图4是图示根据一些示例实施方案的鞋类鞋面405的一部分的图,该鞋类鞋面405
的一部分具有用于包括机动化系带引擎的鞋类组件中的系带架构400。在该示例中,鞋面405的内侧部分被图示成具有鞋带引导件410,鞋带引导件410将鞋带缆线430的路线规定成一直穿行到达内侧出口引导件435。鞋带引导件410被封装在加强件420中,以形成鞋带引导件部件415,其中鞋带引导件部件的至少一部分可重新定位在鞋面405上。在一个示例中,鞋带引导件部件415由魔术贴(hook-n-loop)材料支撑,并且鞋面405提供可接受魔术贴材料的表面。在该示例中,鞋带引导件部件415可以用刺毛(hook)部分作背衬,其中鞋面405提供针织的圆毛表面(knit loop surface)以接纳鞋带引导件部件415。在另一个示例中,鞋带引导件部件415可以具有集成为与轨道例如轨道445接合的轨道接口。基于轨道的集成可以为鞋带引导件部件415提供安全、有限行程的移动选项。例如,轨道445基本上垂直于中央部分450的纵向轴线延伸,并且允许使鞋带引导件部件415沿着轨道的长度定位。在一些示例中,轨道445可以从外侧横跨到内侧,以在中央部分450的任一侧上保持鞋带引导件部件。类似的轨道可以被定位在适当的位置处以保持所有的鞋带引导件部件415,使得能够对鞋类鞋面405上的所有鞋带引导件在限制方向上进行调整。
41.鞋类鞋面405图示了包括中央弹性构件例如弹性构件440的另一示例系带架构。在这些示例中,至少沿着内侧和外侧的鞋面鞋带引导件部件可以跨过中央部分450与弹性构件连接,该弹性构件允许不同的鞋类设计获得不同水平的贴合性和性能。例如,需要通过宽范围的横向运动固定足部的高性能篮球鞋可以利用具有高弹性模量的弹性构件来确保紧密配合。在另一个示例中,跑步鞋可以利用具有低弹性模量的弹性构件,因为跑步鞋可以被设计成集中于长距离公路跑步的舒适性,而不是提供高水平的横向运动约束。在某些示例中,弹性构件440可以是可更换的,或包括允许调节弹性水平的机构。如以上所讨论的,在一些示例中,鞋类鞋面例如鞋面405可以包括沿着中央部分450的间隙,该间隙至少部分地将内侧与外侧分开。即使沿着中央部分450具有小间隙,弹性构件例如弹性构件440也可以用于跨越该间隙。
42.虽然图4仅图示了单个轨道445或单个弹性构件440,但在特定的系带架构中,这些元件可以被重复用于任何或所有的鞋带引导件。
43.图5是图示根据一些示例实施方案的鞋类鞋面405的一部分的图,该鞋类鞋面405具有用于包括机动化系带引擎的鞋类组件中的系带架构400。在该示例中,图4中图示的中央部分450被中央闭合机构460代替,在该示例中,中央闭合机构460被图示为中央拉链465。中央闭合机构被设计成使得鞋类鞋面405中的开口更宽,以便容易进入和离开。中央拉链465可以容易地拉开,以能够实现足部进入或离开。在其他示例中,中央闭合件460可以是钩环、搭扣、扣钩、拴扣、辅助鞋带(secondary laces)或任何类似的闭合机构。
44.图6是图示了根据一些示例实施方案的鞋类鞋面405的一部分的图,该鞋类鞋面405具有用于包括机动化系带引擎的鞋类组件的系带架构600。在该示例中,系带架构600增加了鞋跟系带部件615,鞋跟系带部件615包括鞋跟系带引导件610和鞋跟加强件620以及鞋跟再定向引导件610和鞋跟离开引导件635。鞋跟再定向引导件610将鞋带缆线430从最后一个鞋带引导件410离开朝向鞋跟系带部件615转移。鞋跟系带部件615由鞋跟系带引导件610与鞋跟加强件620一起形成。鞋跟系带引导件610被描绘成具有与鞋面405上其他位置中使用的系带引导件相似的形状。然而,在其他示例中,鞋跟系带引导件610可以是其他形状或包括多个鞋带引导件。在该示例中,鞋跟鞋带部件615被示出安装在鞋跟轨道645上,允许鞋
跟鞋带部件615的位置的可调。类似于以上讨论的可调节鞋带引导件,其他机构可以被用于能够调节鞋跟鞋带部件615的定位,例如钩环紧固件或同等的紧固机构。
45.在一些示例中,鞋面405包括鞋跟脊(heel ridge)650,类似于以上讨论的中央部分450,鞋跟脊650可以包括闭合机构。在具有鞋跟闭合机构的示例中,鞋跟闭合机构被设计成通过扩大传统的鞋类组件足部开口来提供容易地进入鞋类和从鞋类离开。此外,在一些示例中,鞋跟系带部件615可以跨过鞋跟脊650(具有或不具有鞋跟闭合机构)连接到相对侧上的相匹配的鞋跟系带部件。该连接可以包括类似于弹性构件440的弹性构件。
46.图7a-7b是图示根据一些示例实施方案的鞋类鞋面405的一部分的图,该鞋类鞋面405具有用于包括机动化系带引擎的鞋类组件中的系带架构700。在该示例中,系带架构700包括用于规定鞋带730的路线的鞋带引导件710。鞋带引导件710可以包括相关联的加强件720。在该示例中,鞋带引导件710被配置成允许鞋带引导件710的部分从图7a中所图示的打开初始位置屈曲到图7b中所图示的屈曲闭合位置(其中,在每个图中,虚线图示出相对的位置用于参考)。在该示例中,鞋带引导件710包括延伸部分,该延伸部分在打开初始位置和闭合位置之间呈现出约14度的屈曲。其他示例可以在鞋带引导件710的初始位置(或形状)和最终位置之间呈现出或多或少的屈曲。鞋带引导件710的屈曲发生在鞋带730被收紧时。鞋带引导件710的屈曲通过以下方式进行运作而使扭矩相对于鞋带位移的曲线平滑:向鞋带730施加一些初始张力并且提供另外的机构来消散收紧过程期间的鞋带张力。因此,在初始形状或屈曲位置中,鞋带引导件710在鞋带缆线中产生一些初始张力,这还用于收紧(take up)鞋带缆线的松弛。当鞋带缆线的收紧开始时,鞋带引导件710屈曲或变形。
47.在此示例中,鞋带引导件710是塑料管或聚合物管,并且可以具有取决于管的特定组成的不同的弹性模量。鞋带引导件710的弹性模量连同加强件720的配置将控制由鞋带引导件710的屈曲在鞋带730中引起的额外的张力的量。当鞋带引导件710试图恢复到原始形状时,鞋带引导件710的端部(腿部或延伸部)的弹性变形在鞋带730上引起连续的张力。在一些示例中,整个鞋带引导件在鞋带引导件的长度上均匀地屈曲。在其他示例中,屈曲主要地发生在鞋带引导件的u形部分内,其中延伸部保持大体上直的。在又一些其他的示例中,延伸部容纳大部分屈曲(flex),其中u形部分保持相对固定。
48.加强件720以允许鞋带引导件710的端部移动的方式粘合在鞋带引导件710上方。在一些示例中,加强件720通过以上讨论的热熔工艺被粘合,其中热活化粘合剂的放置允许一定的开口以实现鞋带引导件710的屈曲。在其他实施方案中,加强件720可以被缝制到适当位置中或可以使用粘合剂和缝合的组合。加强件720被如何粘合或构造可以影响鞋带引导件的哪部分在来自鞋带缆线的载荷下屈曲。在一些示例中,热熔围绕鞋带引导件的u形部分集中,使延伸部(腿部)更加自由地屈曲。
49.图7c-7d是图示根据一些示例实施方案的用于鞋类组件中的可变形鞋带引导件710的图。在此示例中,以上参考图7a和图7b介绍的鞋带引导件710被另外详细地讨论。图7c图示了处于第一(打开)状态的鞋带引导件710,第一(打开)状态可以被认为是非变形状态。图7d图示了处于第二(闭合/屈曲)状态的鞋带引导件710,第二(闭合/屈曲)状态可以被认为是变形状态。鞋带引导件710可以包括三个不同的区段,例如中间区段712、第一延伸部714和第二延伸部716。鞋带引导件710还可以包括鞋带接收开口740和鞋带离开开口742。如以上提及的,鞋带引导件710可以具有不同的弹性模量,这用一定的施加的张力来控制变形
的水平。在一些示例中,鞋带引导件710可以由具有不同弹性模量的不同的区段构造成,例如具有第一弹性模量的中间区段712、具有第二弹性模量的第一延伸部和具有第三弹性模量的第二延伸部。在某些示例中,第二弹性模量和第三弹性模量可以是大体上相似的,导致第一延伸部和第二延伸部以相似的方式屈曲或变形。在此示例中,大体上相似可以被解释为弹性模量在彼此的几个百分点之内。在一些示例中,鞋带引导件710可以具有可变的弹性模量,该弹性模量从顶点746处的高模量朝向第一延伸部和第二延伸部的外端部变为低模量。在这些示例中,模量可以基于鞋带引导件710的壁厚变化。
50.鞋带引导件710限定在描述可变形鞋带引导件如何起作用方面有用的许多轴线。例如,第一延伸部714可以限定第一进入鞋带轴线(first incoming lace axis)750,第一进入鞋带轴线750与限定在第一延伸部714内的内部通道的至少外部部分对齐。第二延伸部716限定第一外出鞋带轴线(first outgoing lace axis)760,第一外出鞋带轴线760与限定在第二延伸部716内的内部通道的至少外部部分对齐。在变形时,鞋带引导件710限定第二进入鞋带轴线752和第二外出鞋带轴线762,它们各自与第一延伸部和第二延伸部的相应部分对齐。鞋带引导件710还包括中间轴线744,该中间轴线744在顶点746处与鞋带引导件710相交,并且距第一延伸部和第二延伸部相等的距离(假设对称的鞋带引导件处于非变形状态,如图7c中所图示的)。
51.图7e是曲线图770,图示了根据一些示例实施方案的用于可变形鞋带引导件的多种扭矩相对于鞋带位移的曲线。如以上所讨论的,使用鞋带引导件710实现的益处中的一种包括改进扭矩(或鞋带张力)相对于鞋带位移(或缩短)的曲线。曲线776图示了用于在示例系带架构中使用的不可变形鞋带引导件的扭矩相对于位移的曲线。曲线776图示了鞋带如何在收紧过程接近结束时在短位移内经历张力的快速增加。相比之下,曲线778图示了用于在示例系带架构中使用的第一可变形鞋带引导件的扭矩相对于位移的曲线。曲线778以类似于曲线776的方式开始,但当鞋带引导件通过额外的鞋带张力变形时,曲线被平坦化,导致张力在较大的鞋带位移内增加。使曲线变平缓允许最终用户更好地控制鞋类的贴合性和性能。
52.最后一个示例被分成三个节段,初始收紧节段780、适应性节段782和反应性节段784。节段780、782、784可以用于需要扭矩和总位移(resultant displacement)的任何情况。然而,反应性节段784可以特别地用于以下情况:机动化系带引擎回应于未预料到的外部因素突然改变或校正鞋带的位移,未预料到的外部因素为例如穿用者突然停止移动,导致鞋带上相对高的载荷。相比之下,当可以利用鞋带的更加平缓的位移时,可以利用适应性节段782,因为可以预料到鞋带上载荷的变化,例如,由于载荷的变化可能不太突然,或活动的变化是由穿用者输入到机动化系带引擎中的,或机动化系带引擎能够通过机器学习预料活动的变化。产生此最后一个示例的可变形鞋带引导件设计被设计成通过鞋带引导件结构设计(例如通道形状、材料选择或组合参数)来产生适应性节段782和反应性节段784。产生最后一个示例的系带架构和鞋带引导件还在鞋带缆线中产生预张力,从而产生所图示的初始收紧节段780。
53.图8a-8f是图示根据一些示例实施方案的用于某些系带架构中的示例系带引导件800的图。在此示例中,图示了具有开放鞋带通道的可选择的鞋带引导件。以下描述的系带引导件800可以被替换成以上参考鞋带引导件410、鞋跟鞋带引导件610或甚至内侧出口引
导件435讨论的任何系带架构。为了简洁起见,以上讨论的所有多种配置在此不再重复。系带引导件800包括引导件突片805、缝合开口810、引导件上表面815、鞋带保持器820、鞋带通道825、通道半径830、鞋带接入开口840、引导件下表面845和引导件半径850。开放通道鞋带引导件诸如系带引导件800的优点包括在将鞋带引导件安装在鞋类鞋面上之后容易为鞋带缆线规定路线的能力。对于在以上讨论的许多鞋带架构示例中所图示的管状鞋带引导件,在将鞋带引导件粘合到鞋类鞋面之前,将鞋带缆线按规定路线行进穿过鞋带引导件是最容易实现的(不是说以后不能实现)。在鞋带引导件800被定位在鞋类鞋面上之后,通过允许鞋带缆线简单地推动经过鞋带保持器820,开放通道鞋带引导件有利于简单的鞋带路线安排。系带引导件800可以由多种材料制成,包括金属或塑料。
54.在此示例中,系带引导件800可以最初通过缝合或粘合剂附接到鞋类鞋面。图示的设计包括缝合开口810,缝合开口810被配置成能够容易手动或自动将系带引导件800缝合到鞋类鞋面(或类似材料)上。一旦系带引导件800被附接到鞋类鞋面,鞋带缆线就可以通过将鞋带缆线的环简单地拉入鞋带通道825中来按规定路线行进。鞋带接入开口840延伸穿过下表面845,以提供凹入槽(relief recess)用于鞋带缆线绕过鞋带保持器820。在一些示例中,鞋带保持器820可以是不同的尺寸,或甚至可以分成多个较小的突出部。在示例中,鞋带保持器820可以在宽度上较窄,但朝向接入开口840进一步延伸或甚至延伸到接入开口840中。在一些示例中,接入开口840也可以是不同的尺寸,并且通常将在某种程度上与鞋带保持器820的形状呈镜像(如图8f中所图示)。在此示例中,通道半径830被设计成对应于或稍大于鞋带缆线的直径。通道半径830是系带引导件800的参数中的一个,其可以控制穿过系带引导件800延伸的鞋带缆线所经历的摩擦的量。系带引导件800的影响鞋带缆线所经历的摩擦的另一个参数包括引导件半径850。引导件半径850还可以影响定位于鞋类鞋面上的鞋带引导件的频率或间距。
55.图8g是图示根据一些示例实施方案的鞋类鞋面405的一部分的图,鞋类鞋面405具有使用系带引导件800的系带架构890。在此示例中,多个系带引导件800被布置在鞋类鞋面405的外侧上,以形成系带架构890的一半。类似于以上讨论的系带架构,系带架构890使用系带引导件800形成波形图案或降落伞式系带图案以为鞋带缆线安排路线。此类型的系带架构的益处中的一种是,鞋带收紧可以产生鞋类鞋面405的外内侧收紧(later-medial tightening)和前后收紧两者。
56.在此示例中,系带引导件800至少最初通过缝合线860粘合到鞋面405。缝合线860被示出在缝合开口810上方或接合缝合开口810。系带引导件800中的一个也被描绘成具有叠加在系带引导件上的加强件870。这种加强件可以单独地定位在每个系带引导件800上方。可选择地,较大的加强件可以被用于叠加在多个系带引导件上。类似于以上讨论的加强件,加强件870可以通过粘合剂、热活化粘合剂和/或缝合来粘合。在一些示例中,加强件870可以使用粘合剂(热活化或非热活化)和真空装袋工艺(vacuum bagging process)来粘合,该真空装袋工艺将加强件均匀地压紧在系带引导件上方。类似的真空装袋工艺也可以与以上讨论的加强件和系带引导件一起使用。在其他示例中,机械压机或类似的机器可以用于帮助将加强件粘合在系带引导件上方。
57.一旦所有系带引导件800被最初定位并且附接到鞋类鞋面405,鞋带缆线就可以按规定路线行进穿过系带引导件。鞋带缆线路线安排可以开始于将鞋带缆线的第一端锚固在
外侧锚固点470处。然后,鞋带缆线可以以最前面的系带引导件开始并且朝向鞋面405的鞋跟部向后运作拉入每个鞋带通道825中。一旦鞋带缆线按规定路线行进穿过所有系带引导件800,加强件870就可以可选地粘合在每个系带引导件800上方,以固定系带引导件和鞋带缆线两者。
58.组装工艺
59.图9是流程图,图示了根据一些示例实施方案的用于组装包括系带引擎的鞋类的鞋类组装工艺900。在此示例中,组装工艺900包括以下操作,例如:在910处,获得鞋类鞋面、鞋带引导件和鞋带缆线;在920处,将鞋带缆线按规定路线穿过管状鞋带引导件;在930处,锚固鞋带缆线的第一端;在940处,锚固鞋带缆线的第二端;在950处,定位鞋带引导件;在960处,固定鞋带引导件;以及在970处,将鞋面与鞋类组件集成在一起。以下进一步详细描述的工艺900可以包括所描述的工艺操作中的一些或所有,并且工艺操作中的至少一些可以在各个位置处和/或使用不同的自动工具发生。
60.在此示例中,工艺900通过获得鞋类鞋面、多个鞋带引导件和鞋带缆线开始于910。鞋类鞋面例如鞋面405,可以是与鞋类组件的其余部分(例如鞋底、鞋底夹层、外部叠加物等)分离的平坦的鞋类鞋面。此示例中的鞋带引导件包括如以上讨论的管状塑料鞋带引导件,但也可以包括其他类型的鞋带引导件。在920处,工艺900以鞋带缆线按规定路线穿过(或穿行经过)多个鞋带引导件继续。虽然鞋带缆线在组装工艺900中可以在不同的点处按规定路线穿过鞋带引导件,但当使用管状鞋带引导件时,在组装到鞋类鞋面上之前将鞋带按规定路线穿过鞋带引导件可能是优选的。在一些示例中,鞋带引导件可以被预先穿到鞋带缆线上,其中工艺900开始于在910处的操作期间获得的已经穿到鞋带上的多个鞋带引导件。
61.在930处,工艺900以鞋带缆线的第一端被锚固到鞋类鞋面继续。例如,鞋带缆线430可以沿着鞋面405的外侧边缘被锚固。在一些示例中,鞋带缆线可以临时锚固到鞋面405,其中更永久的锚固在鞋类鞋面与剩余的鞋类组件集成期间实现。在940处,工艺900可以以鞋带缆线的第二端被锚固到鞋类鞋面继续。如同鞋带缆线的第一端,第二端可以临时地锚固到鞋面。另外,工艺900可以可选地将第二端的锚固推迟到该工艺之后或或与鞋类组件集成期间。
62.在950处,工艺900以多个鞋带引导件被定位于鞋面上继续。例如,鞋带引导件410可以被定位于鞋面405上,以产生期望的系带图案。一旦鞋带引导件被定位,工艺900就可以在960处通过将鞋带引导件固定到鞋类鞋面上继续。例如,加强件420可以固定在鞋带引导件410上方,以将鞋带引导件410保持在适当位置。最后,工艺900可以在970处以鞋类鞋面被集成到鞋类组件的其余部分(包括鞋底)完成。在示例中,集成可以包括将连接鞋类鞋面的外侧和内侧的鞋带缆线的环定位在适当位置,以接合鞋类组件的鞋底夹层中的系带引擎。
63.图10是流程图,图示了根据一些示例实施方案的用于组装包括多个系带引导件的鞋类的鞋类组装工艺1000。在此示例中,组装工艺1000包括以下操作,例如:在1010处,获得鞋类鞋面、鞋带引导件和鞋带缆线;在1020处,将系带引导件固定在鞋类鞋面上;在1030处,锚固鞋带缆线的第一端;在1040处,将鞋带缆线按规定路线行进穿过鞋带引导件;在1050处,锚固鞋带缆线的第二端;可选地,在1060处,将加强件固定在鞋带引导件上方;以及在1070处,将鞋面与鞋类组件集成在一起。以下进一步详细描述的工艺1000可以包括所描述
的工艺操作中的一些或所有,并且工艺操作中的至少一些可以在各个位置处和/或使用不同的自动工具发生。
64.在此示例中,工艺1000通过获得鞋类鞋面、多个鞋带引导件和鞋带缆线开始于1010。鞋类鞋面例如鞋面405,可以是与鞋类组件的其余部分(例如鞋底、鞋底夹层、外部叠加物等)分离的平坦的鞋类鞋面。此示例中的鞋带引导件包括如以上讨论的开放通道塑料系带引导件,但也可以包括其他类型的鞋带引导件。在1020处,工艺1000以系带引导件被固定到鞋面继续。例如,系带引导件800可以单独地缝合在鞋面405上的适当位置。
65.在1030处,工艺1000以鞋带缆线的第一端被锚固到鞋类鞋面继续。例如,鞋带缆线430可以沿着鞋面405的外侧边缘锚固。在一些示例中,鞋带缆线可以被临时锚固到鞋面405,其中更永久的锚固在鞋类鞋面与剩余的鞋类组件集成期间实现。在1040处,工艺1000以鞋带缆线按规定路线行进穿过开放通道鞋带引导件继续,这包括留下鞋带环以用于与鞋类鞋面的外侧和内侧之间的系带引擎接合。鞋带环可以是预定的长度,以确保系带引擎能够适当地收紧组装的鞋类。
66.在1050处,工艺1000可以以鞋带缆线的第二端被锚固到鞋类鞋面继续。如同鞋带缆线的第一端,第二端可以临时地锚固到鞋面。另外,工艺1000可以可选地将第二端的锚固推迟到该工艺之后或与鞋类组件集成期间。在某些示例中,推迟鞋带缆线的第一端和/或第二端的锚固可以允许调节总的鞋带长度,这在系带引擎的集成期间可能是有用的。
67.在1060处,工艺1000可以可选地包括用于将织物加强件(叠加物)固定在鞋带引导件上方以将鞋带引导件进一步固定到鞋类鞋面的操作。例如,系带引导件800可以具有热熔在系带引导件上方的加强件870,以进一步固定系带引导件和鞋带缆线。最后,工艺1000可以在1070处以鞋类鞋面被集成到鞋类组件的其余部分(包括鞋底)完成。在示例中,集成可以包括将连接鞋类鞋面的外侧和内侧的鞋带缆线的环定位在适当位置,以接合鞋类组件的鞋底夹层中的系带引擎。
68.示例
69.本发明人已经认识到,除其他事项外,需要一种改进的系带架构用于鞋带的自动化和半自动化的收紧。除其他事项外,本文件描述了用于自动化鞋类平台的示例系带架构、用于系带架构中的示例鞋带引导件以及相关的组装技术。以下示例提供了本文所讨论的致动器和鞋类组件的非限制性示例。
70.示例1描述了包括鞋类组件的主题,鞋类组件具有系带架构以有助于自动化收紧。在此示例中,鞋类组件可以包括鞋类鞋面,该鞋类鞋面包括鞋包头部分(toe box portion)、内侧、外侧和鞋跟部分,内侧和外侧各自从鞋包头部分向鞋跟部分向近侧地延伸。鞋类组件还可以包括行进穿过多个鞋带引导件的鞋带缆线。鞋带缆线可以包括沿着内侧的远侧外部部分锚固的第一端和沿着外侧的远侧外部部分锚固的第二端。多个鞋带引导件可以沿着内侧和外侧分布,并且多个鞋带引导件中的每个鞋带引导件可以适于接纳一段鞋带缆线。在该示例中,鞋带缆线可以延伸穿过多个鞋带引导件中的每一个,以沿着鞋类鞋面的内侧和外侧中的每一个形成图案。鞋类组件还可以包括内侧近侧鞋带引导件,该内侧近侧鞋带引导件将鞋带缆线的路线规定成从由多个鞋带引导件的内侧部分形成的图案行进到允许鞋带缆线接合布置在鞋底夹层部分内的系带引擎的位置中。最后,鞋类组件还可以包括外侧近侧鞋带引导件,外侧近侧鞋带引导件用于将鞋带缆线的路线规定成离开允许
鞋带缆线接合系带引擎的位置并进入由多个鞋带引导件的外侧部分形成的图案中。
71.在示例2中,示例1的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件形成u形通道以保持鞋带缆线。
72.在示例3中,示例2的主题可以可选地包括:每一个鞋带引导件中的u形通道是允许鞋带环被拉入鞋带引导件中的开放通道。
73.在示例4中,示例2的主题可以可选地包括:每一个鞋带引导件中的u形通道形成有弯曲为或形成为u形的管状结构,其中鞋带缆线穿行经过该管状结构。
74.在示例5中,示例1至4中任一项的主题可以可选地包括:图案被成形为使在收紧鞋带缆线期间的力或扭矩相对于鞋带位移的曲线变平。
75.在示例6中,示例1至5中任一项的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件利用叠加物被固定到鞋类鞋面,该叠加物包括压紧在每一个鞋带引导件上方的热活化粘合剂。
76.在示例7中,示例6的主题可以可选地包括:叠加物是浸渍有热活化粘合剂的织物。
77.在示例8中,示例6的主题可以可选地包括:每一个鞋带引导件的部分延伸超出固定每一个鞋带引导件的叠加物。
78.在示例9中,示例1至8中任一项的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件至少最初通过缝合被固定到鞋类鞋面。
79.在示例10中,示例9的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件利用叠加物被进一步固定到鞋类鞋面,该叠加物包括压紧在每一个鞋带引导件上方的热活化粘合剂。
80.在示例11中,示例1至10中任一项的主题可以可选地包括:用鞋带引导件形成的图案沿着鞋类鞋面的内侧和外侧中的每一个产生大体上正弦型的波。
81.在示例12中,示例11的主题可以可选地包括:大体上正弦型的波是与标准正弦波相比在波峰和波谷处包括较大半径曲线的修改的正弦波。
82.在示例13中,示例1至12中任一项的主题可以可选地包括:该图案在内侧和外侧中的每一个上靠近鞋类鞋面的中心线各包括三个鞋面鞋带引导件。
83.在示例14中,示例13的主题可以可选地包括:在内侧和外侧中的每一个上的三个鞋面鞋带引导件中的每一个与中心线间隔不同的距离。
84.在示例15中,示例1至14中任一项的主题可以可选地包括:鞋类鞋面具有弹性中心线部分,该弹性中心线部分至少从鞋包头部分向近侧地延伸至足部开口。
85.在示例16中,示例1至15中任一项的主题可以可选地包括:成对的鞋带引导件通过弹性构件跨过鞋类鞋面的中心线部分被连接。
86.在示例17中,示例16的主题可以可选地包括:弹性构件适于使在收紧鞋带缆线期间的扭矩相对于鞋带位移的曲线平滑。
87.在示例18中,示例16的主题可以可选地包括:弹性构件与不同的弹性构件是可替换的,以提供变化的弹性模量,进而改变鞋类鞋面的贴合特性。
88.在示例19中,示例1至18中任一项的主题可以可选地包括:鞋类鞋面包括在多个鞋带引导件的内侧部分和多个鞋带引导件的外侧部分之间从鞋包头部分延伸到足部开口的拉链。
89.在示例20中,示例1至19中任一项的主题可以可选地包括:图案防止鞋带缆线在内侧和外侧之间跨越鞋类鞋面的中央部分。
90.示例21描述了包括鞋类组件的主题,鞋类组件具有系带架构以有助于自动化收紧。在此示例中,用于自动化鞋类平台的系带架构可以包括按规定路线行进穿过多个鞋带引导件的鞋带缆线。鞋带缆线可以包括沿着鞋类组件的鞋面部分的内侧的远侧外部部分锚固的第一端和沿着鞋面部分的外侧的远侧外部部分锚固的第二端。多个鞋带引导件可以沿着内侧以第一图案分布,并且沿着外侧以第二图案分布。另外,多个鞋带引导件中的每一个鞋带引导件可以包括开放的鞋带通道,以接纳一段鞋带缆线。系带架构还可以包括内侧近侧鞋带引导件,该内侧近侧鞋带引导件将鞋带缆线的路线规定成从由多个鞋带引导件的内侧部分形成的第一图案行进到允许鞋带缆线接合布置在鞋底夹层部分内的系带引擎的位置中。最后,在此示例中,系带架构还可以包括外侧近侧鞋带引导件,该外侧近侧鞋带引导件用于将鞋带缆线的路线规定成离开允许鞋带缆线接合系带引擎的位置并进入由多个鞋带引导件的外侧部分形成的第二图案中。
91.在示例22中,示例21的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件包括鞋带保持构件,鞋带保持构件延伸到开放的鞋带通道中,以帮助将鞋带缆线保持在鞋带引导件内。
92.在示例23中,示例22的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件具有与鞋带保持构件相对的鞋带接入开口,该鞋带接入开口提供空隙以将缆线围绕鞋带保持构件安排路线。
93.在示例24中,示例21至23中任一项的主题可以可选地包括:多个鞋带引导件中的每一个鞋带引导件具有沿着鞋带引导件的上方部分的缝合开口,该缝合开口使得鞋带引导件能够通过缝合至少部分地固定到鞋面部分。
94.附加说明
95.在整个本说明书中,多个实例可以实现以单个实例描述的部件、操作或结构。虽然一种或更多种方法的各个操作被图示和描述为单独的操作,但可以同时进行这些单独的操作中的一个或更多个,并且不需要以所图示的顺序进行操作。在示例配置中作为单独部件提出的结构和功能可以被实现为组合的结构或部件。类似地,作为单个部件提出的结构和功能可以被实现为单独的部件。这些和其他变化、修改、添加和改进落入本文中的主题的范围内。
96.尽管已经参考特定示例实施方案描述了本发明主题的概述,但是在不脱离本公开的实施方案的更宽范围的情况下,可以对这些实施方案进行多种修改和改变。本发明主题的这些实施方案在本文中可以单独地或统一地用术语“发明”指代,这仅仅是为了方便,而不旨在将本技术的范围自愿地限制到任何单个公开或发明概念(如果事实上公开了不止一个的话)。
97.本文所图示的实施方案被足够详细地描述,以使本领域技术人员能够实践所公开的教导。可以使用其他实施方案并从其导出,使得可以在不脱离本公开的范围的情况下进行结构和逻辑替换和改变。因此,本公开不应被理解为限制性的,并且多个实施方案的范围包括所公开的主题被授权的等同物的全部范围。
98.如本文所使用的,术语“或”可以被解释为包含性的或排他性的含义。此外,可以为
在本文中被描述为单个实例的资源、操作或结构提供多个实例。此外,多种资源、操作、模块、引擎和数据存储之间的边界有些任意,并且在特定说明性构造的上下文中说明了特定的操作。功能的其他分配是可以预见的,并且可以落在本公开的多个实施方案的范围内。通常,在示例构造中作为单独资源提出的结构和功能可以被实现为组合的结构或资源。类似地,作为单个资源提出的结构和功能可以被实现为单独的资源。这些和其他变化、修改、添加和改进落入如由所附权利要求表示的本公开的实施方案的范围内。因此,说明书和附图被认为是说明性的而非限制性的含义。
99.这些非限制性示例中的每一个可以独立存在,或可以以多种排列或组合与其他示例中的一个或更多个组合。
100.以上详细描述包括对附图的参考,附图形成详细描述的一部分。附图以说明的方式示出了其中本发明可以被实践的具体实施方案。这些实施方案在本文中也称为“示例”。这样的示例可以包括除了示出或描述的元件之外的元件。然而,本发明人还预期其中仅提供示出或描述的那些元件的示例。此外,本发明人还预期使用所示出或描述的那些元件(或其一个或更多个方面)的任何组合或排列的示例,或者关于特定示例(或其一个或更多个方面),或者关于本文中所示出或描述的其他示例(或其一个或更多个方面)。
101.如果本文件与通过引用这样并入的任何文件之间的用法不一致,则以本文件中的用法为准。
102.在本文件中,独立于“至少一个”或“一个或更多个”的任何其他实例或使用,如专利文件中常见的,术语“一(a)”或“一(an)”被用于包括一个或多于一个实例或使用。在本文件中,除非另外指明,否则术语“或”用于指非排他性的,或使得“a或b”包括“a但不是b”、“b但不是a”和“a和b”。在本文件中,术语“包括(including)”和“其中(in which)”被用作相应术语“包括(comprising)”和“其中(wherein)”的简明英语等价物。另外,在下面的权利要求中,术语“包括(including)”和“包括(comprising)”是开放式的,也就是说,包括除了在权利要求中这样的术语之后列出的那些之外的元件的系统、装置、物品、组合物、制剂或工艺仍然被认为落入该权利要求的范围内。此外,在下面的权利要求中,术语“第一”、“第二”和“第三”等仅用作标签,并且不意图对其对象施加数字要求。
103.本文描述的方法(工艺)示例,诸如鞋类组件示例,可以至少部分地包括机器实施方式或机器人实施方式。
104.以上描述旨在是说明性的而非限制性的。例如,以上描述的示例(或其一个或更多个方面)可以彼此组合使用。其他实施方案可以被使用,诸如由本领域普通技术人员在回顾以上描述时使用。摘要(如果提供的话)被包括,以允许读者快速确定技术公开的性质。摘要被提交,其并不应理解为用于解释或限制权利要求的范围或含义。此外,在以上描述中,多种特征可以被组合在一起以简化本公开。这不应该被解释为旨在未要求保护的公开特征对于任何权利要求都是必不可少的。相反,发明主题可能在于少于特定公开的实施方案的所有特征。因此,下面的权利要求作为示例或实施方案在此被并入到详细描述中,其中每个权利要求作为单独的实施方案独立存在,并且预期这样的实施方案可以以多种组合或排列彼此组合。本发明的范围应当参考所附权利要求连同这样的权利要求被授权的等同物的全部范围来确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。