1.本实用新型涉及一种可拆卸式机器人手臂。
背景技术:
2.机器人手臂是机器人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。机器人手臂可以模仿人手臂的某些工作功能,用以抓取、搬运物件或操作工具。但是现有的机器人手臂普遍为固定结构,拆卸困难,不能根据需要对零部件灵活进行更换,机器人手臂宽窄固定,只能搬运一定尺寸的物品,如果需要搬运多种不同尺寸的物品,需要重新选购大尺寸机器人,成本大大增加。
技术实现要素:
3.本实用新型的目的在于针对现有技术的不足之处,提供一种可拆卸式机器人手臂。
4.本实用新型解决上述问题的技术方案为:一种可拆卸式机器人手臂,包括底座,安装在底座上的立臂组件,安装在立臂组件顶部的横臂组件,安装在横臂组件上的抓取组件;
5.抓取组件包括安装在横臂组件上的驱动箱,通过滚动轴承转动安装在驱动箱上且上端穿出驱动箱的主轴,安装在主轴上且位于驱动箱顶部的驱动齿轮,安装在主轴上且位于驱动箱内的驱动蜗轮,通过滚动轴承转动安装在驱动箱内且与驱动蜗轮啮合的驱动蜗杆,安装在驱动箱内且输出轴与驱动蜗杆连接的驱动电机,安装在驱动箱上的抓手件。
6.进一步的,所述抓手件包括通过滚动轴承转动安装在驱动箱顶部且沿y方向分布的第一轴、第二轴,安装在第一轴上的第一齿轮,安装在第二轴上且与第一齿轮、驱动齿轮同时啮合的第二齿轮,分别位于驱动箱前后两侧的第一抓杆、第二抓杆,第一抓杆与第二抓杆始终关于驱动箱前后对称,一端安装在第一齿轮圆心处且另一端与第一抓杆铰接的第一驱动杆,一端安装在第二齿轮圆心处且另一端与第二抓杆铰接的第二驱动杆,第一驱动杆与第二驱动杆始终关于驱动箱前后对称,一端与驱动箱铰接且另一端与第一抓杆铰接、沿z方向分布的一对第三驱动杆,两根第三驱动杆上下对称,第三驱动杆与第一驱动杆平行,一端与驱动箱铰接且另一端与第二抓杆铰接、沿z方向分布的一对第四驱动杆,两根第四驱动杆上下对称,第四驱动杆与第二驱动杆平行,一端与第一抓杆铰接且另一端与驱动箱铰接的第五驱动杆,第五驱动杆与第一驱动杆关于驱动箱上下对称,一端与第二抓杆铰接且另一端与驱动箱铰接的第六驱动杆,第六驱动杆与第二驱动杆关于驱动箱上下对称。
7.进一步的,所述第一驱动杆、第二驱动杆、第三驱动杆、第三驱动杆、第四驱动杆、第五驱动杆、第六驱动杆的长度均相同;
8.第一齿轮、第二齿轮机械参数完全相同。
9.进一步的,所述第一驱动杆、第二驱动杆、第三驱动杆、第四驱动杆、第五驱动杆、第六驱动杆的结构均相同;
10.第一驱动杆包括首杆,与首杆同轴设置的尾杆,位于首杆与尾杆之间且同轴设置的多根过渡杆;
11.相邻两根过渡杆之间通过法兰连接,与首杆距离最近的过渡杆通过法兰与首杆连接,与尾杆距离最近的过渡杆通过法兰与尾杆连接。
12.进一步的,所述第一抓杆与第二抓杆结构相同;第一抓杆包括起始杆,与起始杆同轴设置的多根延伸杆;
13.相邻两根延伸杆之间通过法兰连接,与起始杆距离最近的延伸杆通过法兰与起始杆连接;延伸杆上安装有抓取块。
14.进一步的,所述立臂组件包括通过滚动轴承转动安装在底座上的立臂,安装在立臂上的传动蜗轮,通过滚动轴承转动安装在底座上且与传动蜗轮啮合的传动蜗杆,安装在底座上且输出轴与传动蜗杆连接的传动电机。
15.进一步的,所述横臂组件包括安装在立臂顶部的横臂,通过滚动轴承转动安装在横臂上且位于横臂靠近抓取组件一端的调节轴,安装在横臂内且输出轴与调节轴连接的调节电机,驱动箱安装在调节轴上。
16.本实用新型具有有益效果:通过立臂组件、横臂组件抓取组件运动,使机器人手臂具有围绕x方向转动、z方向转动的自由度。通过抓取组件抓取工件,利用驱动齿轮与第二齿轮啮合,第二齿轮与第一齿轮啮合,第一驱动杆、第二驱动杆转动,第一驱动杆、第二驱动杆等形成多组平行四边形结构,带动第一抓杆、第二抓杆沿y方向运动,改变第一抓杆与第二抓杆之间的距离,使抓杆抓紧或松开工件。通过第一驱动杆、第一抓杆等的可拆卸结构,使用户可以根据实际需要选择尺寸,对机器人手臂宽窄进行调节;利用法兰拆卸,拆卸过程简单方便,解决了现有机器人手臂普遍为固定结构,不能对零部件灵活进行更换的问题。
附图说明
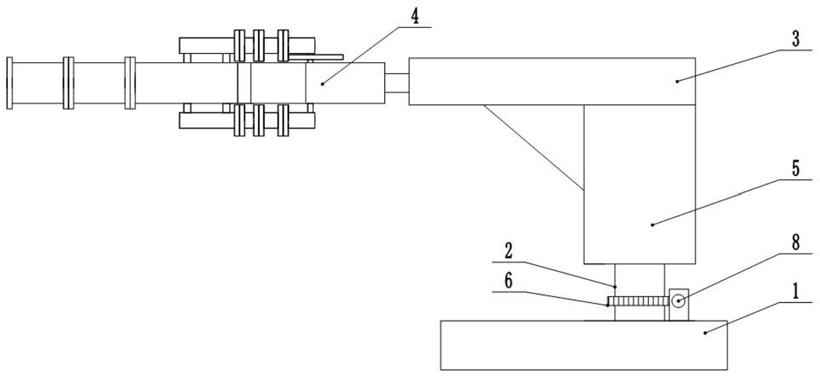
17.图1为本实用新型主视图;
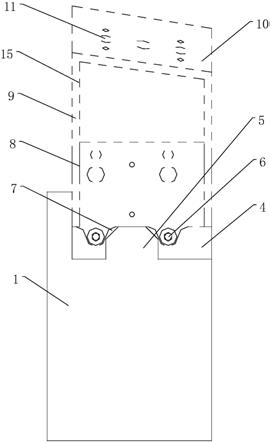
18.图2为本实用新型俯视图;
19.图3为本实用新型抓取组件主视图;
20.图4为本实用新型抓取组件俯视图;
21.图5为本实用新型驱动箱部分剖视图;
22.图6为本实用新型第一驱动杆结构示意图;
23.图7为本实用新型第一抓杆结构示意图。
24.图中:1、底座,2、立臂组件,3、横臂组件,4、抓取组件,5、立臂,6、传动蜗轮,8、传动电机,9、横臂,10、调节轴,11、调节电机,12、驱动箱,13、主轴,14、驱动齿轮,15、驱动蜗轮,16、驱动蜗杆,19、驱动电机,20、抓手件,21、第一齿轮,22、第二齿轮,23、第一抓杆,24、第二抓杆,25、第一驱动杆,26、第二驱动杆,27、第三驱动杆,28、第四驱动杆,29、第五驱动杆,31、首杆,32、尾杆,33、过渡杆,34、起始杆,35、延伸杆,36、抓取块。
具体实施方式
25.下面结合附图及具体实施方式对本实用新型作进一步的说明。
26.一种可拆卸式机器人手臂,包括底座1,安装在底座1上的立臂5组件2,安装在立臂
5组件2顶部的横臂9组件3,安装在横臂9组件3上的抓取组件4。
27.立臂5组件2包括通过滚动轴承转动安装在底座1上的立臂5,安装在立臂5上的传动蜗轮6,通过滚动轴承转动安装在底座1上且与传动蜗轮6啮合的传动蜗杆,安装在底座1上且输出轴与传动蜗杆连接的传动电机8。
28.通过立臂5组件2带动横臂9组件3、抓取组件4运动,使横臂9组件3、抓取组件4围绕立臂5做圆周运动,使机器人手臂具有围绕z方向转动的自由度。
29.横臂9组件3包括安装在立臂5顶部的横臂9,通过滚动轴承转动安装在横臂9上且位于横臂9靠近抓取组件4一端的调节轴10,安装在横臂9内且输出轴与调节轴10连接的调节电机11。
30.通过横臂9组件3带动抓取组件4围绕调节轴10转动,使机器人手臂具有围绕x方向转动的自由度。
31.抓取组件4包括安装在调节轴10上的驱动箱12,通过滚动轴承转动安装在驱动箱12上且上端穿出驱动箱12的主轴13,安装在主轴13上且位于驱动箱12顶部的驱动齿轮14,安装在主轴13上且位于驱动箱12内的驱动蜗轮15,通过滚动轴承转动安装在驱动箱12内且与驱动蜗轮15啮合的驱动蜗杆16,安装在驱动箱12内且输出轴与驱动蜗杆16连接的驱动电机19,安装在驱动箱12上的抓手件20。
32.抓手件20包括通过滚动轴承转动安装在驱动箱12顶部且沿y方向分布的第一轴、第二轴,安装在第一轴上的第一齿轮21,安装在第二轴上且与第一齿轮21、驱动齿轮14同时啮合的第二齿轮22,分别位于驱动箱12前后两侧的第一抓杆23、第二抓杆24,第一抓杆23与第二抓杆24始终关于驱动箱12前后对称,一端安装在第一齿轮21圆心处且另一端与第一抓杆23铰接的第一驱动杆25,一端安装在第二齿轮22圆心处且另一端与第二抓杆24铰接的第二驱动杆26,第一驱动杆25与第二驱动杆26始终关于驱动箱12前后对称,一端与驱动箱12铰接且另一端与第一抓杆23铰接、沿z方向分布的一对第三驱动杆27,两根第三驱动杆27上下对称,第三驱动杆27与第一驱动杆25平行,一端与驱动箱12铰接且另一端与第二抓杆24铰接、沿z方向分布的一对第四驱动杆28,两根第四驱动杆28上下对称,第四驱动杆28与第二驱动杆26平行,一端与第一抓杆23铰接且另一端与驱动箱12铰接的第五驱动杆29,第五驱动杆29与第一驱动杆25关于驱动箱12上下对称,一端与第二抓杆24铰接且另一端与驱动箱12铰接的第六驱动杆,第六驱动杆与第二驱动杆26关于驱动箱12上下对称。
33.第一驱动杆25、第二驱动杆26、第三驱动杆27、第三驱动杆27、第四驱动杆28、第五驱动杆29、第六驱动杆的长度均相同;第一齿轮21、第二齿轮22机械参数完全相同。
34.通过抓取组件4抓取工件,利用驱动蜗轮15与驱动蜗杆16啮合为抓取组件4提供动力。通过驱动齿轮14与第二齿轮22啮合,第二齿轮22与第一齿轮21啮合,第一驱动杆25、第二驱动杆26转动,第一驱动杆25、第二驱动杆26、第三驱动杆27、第四驱动杆28、第五驱动杆29、第六驱动杆形成多组平行四边形结构,带动第一抓杆23、第二抓杆24沿y方向运动,改变第一抓杆23与第二抓杆24之间的距离,使抓杆抓紧或松开工件。
35.第一驱动杆25、第二驱动杆26、第三驱动杆27、第四驱动杆28、第五驱动杆29、第六驱动杆的结构均相同;第一驱动杆25包括首杆31,与首杆31同轴设置的尾杆32,位于首杆31与尾杆32之间且同轴设置的多根过渡杆33;
36.相邻两根过渡杆33之间通过法兰连接,与首杆31距离最近的过渡杆33通过法兰与
首杆31连接,与尾杆32距离最近的过渡杆33通过法兰与尾杆32连接。
37.第一抓杆23包括起始杆34,与起始杆34同轴设置的多根延伸杆35;相邻两根延伸杆35之间通过法兰连接,与起始杆34距离最近的延伸杆35通过法兰与起始杆34连接;延伸杆35上安装有抓取块36。
38.通过第一驱动杆25、第二驱动杆26、第三驱动杆27、第四驱动杆28、第五驱动杆29、第六驱动杆、第一抓杆23、第二抓杆24的可拆卸结构,使用户可以根据实际需要选择尺寸,对机器人手臂宽窄进行调节;利用法兰拆卸,拆卸过程简单方便,解决了现有机器人手臂普遍为固定结构,不能对零部件灵活进行更换的问题。
39.本实用新型工作原理:
40.当需要抓取工件时,立臂5组件2、横臂9组件3带动抓取组件4运动到工件位置处,然后启动抓取组件4,抓取组件4抓紧工件;接着立臂5组件2、横臂9组件3带动抓取组件4运动到选定位置处抓取组件4松开工件。
41.当需要调节机器人手臂宽窄时,选择合适第一驱动杆25、第二驱动杆26、第三驱动杆27、第四驱动杆28、第五驱动杆29、第六驱动杆、第一抓杆23、第二抓杆24的长度,从而选择合适的过渡杆33、延伸杆35个数,然后组装驱动杆与抓杆。
42.不脱离本实用新型的构思和范围可以做出许多其他改变和改型。应当理解,本实用新型不限于特定的实施方式,本实用新型的范围由所附权利要求限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。