技术特征:
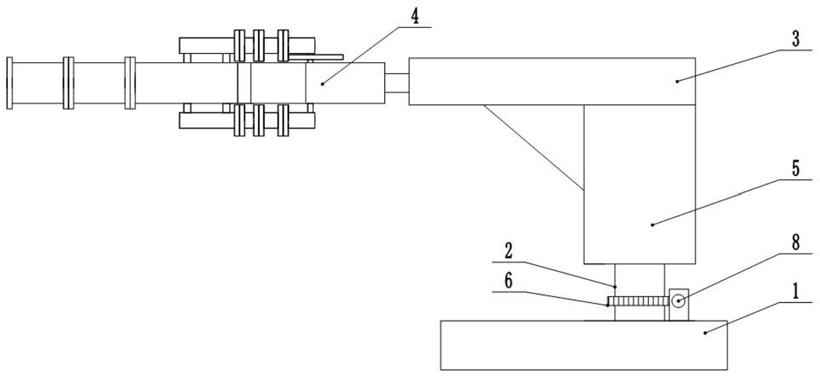
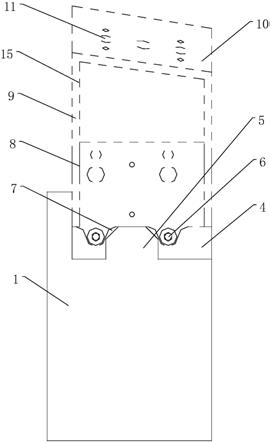
1.一种可拆卸式机器人手臂,其特征在于,包括底座(1),安装在底座(1)上的立臂(5)组件(2),安装在立臂(5)组件(2)顶部的横臂(9)组件(3),安装在横臂(9)组件(3)上的抓取组件(4);抓取组件(4)包括安装在横臂(9)组件(3)上的驱动箱(12),通过滚动轴承转动安装在驱动箱(12)上且上端穿出驱动箱(12)的主轴(13),安装在主轴(13)上且位于驱动箱(12)顶部的驱动齿轮(14),安装在主轴(13)上且位于驱动箱(12)内的驱动蜗轮(15),通过滚动轴承转动安装在驱动箱(12)内且与驱动蜗轮(15)啮合的驱动蜗杆(16),安装在驱动箱(12)内且输出轴与驱动蜗杆(16)连接的驱动电机(19),安装在驱动箱(12)上的抓手件(20)。2.如权利要求1所述的一种可拆卸式机器人手臂,其特征在于,所述抓手件(20)包括通过滚动轴承转动安装在驱动箱(12)顶部且沿y方向分布的第一轴、第二轴,安装在第一轴上的第一齿轮(21),安装在第二轴上且与第一齿轮(21)、驱动齿轮(14)同时啮合的第二齿轮(22),分别位于驱动箱(12)前后两侧的第一抓杆(23)、第二抓杆(24),第一抓杆(23)与第二抓杆(24)始终关于驱动箱(12)前后对称,一端安装在第一齿轮(21)圆心处且另一端与第一抓杆(23)铰接的第一驱动杆(25),一端安装在第二齿轮(22)圆心处且另一端与第二抓杆(24)铰接的第二驱动杆(26),第一驱动杆(25)与第二驱动杆(26)始终关于驱动箱(12)前后对称,一端与驱动箱(12)铰接且另一端与第一抓杆(23)铰接、沿z方向分布的一对第三驱动杆(27),两根第三驱动杆(27)上下对称,第三驱动杆(27)与第一驱动杆(25)平行,一端与驱动箱(12)铰接且另一端与第二抓杆(24)铰接、沿z方向分布的一对第四驱动杆(28),两根第四驱动杆(28)上下对称,第四驱动杆(28)与第二驱动杆(26)平行,一端与第一抓杆(23)铰接且另一端与驱动箱(12)铰接的第五驱动杆(29),第五驱动杆(29)与第一驱动杆(25)关于驱动箱(12)上下对称,一端与第二抓杆(24)铰接且另一端与驱动箱(12)铰接的第六驱动杆,第六驱动杆与第二驱动杆(26)关于驱动箱(12)上下对称。3.如权利要求2所述的一种可拆卸式机器人手臂,其特征在于,所述第一驱动杆(25)、第二驱动杆(26)、第三驱动杆(27)、第四驱动杆(28)、第五驱动杆(29)、第六驱动杆的长度均相同;第一齿轮(21)、第二齿轮(22)机械参数完全相同。4.如权利要求3所述的一种可拆卸式机器人手臂,其特征在于,所述第一驱动杆(25)、第二驱动杆(26)、第三驱动杆(27)、第四驱动杆(28)、第五驱动杆(29)、第六驱动杆的结构均相同;第一驱动杆(25)包括首杆(31),与首杆(31)同轴设置的尾杆(32),位于首杆(31)与尾杆(32)之间且同轴设置的多根过渡杆(33);相邻两根过渡杆(33)之间通过法兰连接,与首杆(31)距离最近的过渡杆(33)通过法兰与首杆(31)连接,与尾杆(32)距离最近的过渡杆(33)通过法兰与尾杆(32)连接。5.如权利要求2所述的一种可拆卸式机器人手臂,其特征在于,所述第一抓杆(23)与第二抓杆(24)结构相同;第一抓杆(23)包括起始杆(34),与起始杆(34)同轴设置的多根延伸杆(35);相邻两根延伸杆(35)之间通过法兰连接,与起始杆(34)距离最近的延伸杆(35)通过法兰与起始杆(34)连接;延伸杆(35)上安装有抓取块(36)。6.如权利要求1所述的一种可拆卸式机器人手臂,其特征在于,所述立臂(5)组件(2)包
括通过滚动轴承转动安装在底座(1)上的立臂(5),安装在立臂(5)上的传动蜗轮(6),通过滚动轴承转动安装在底座(1)上且与传动蜗轮(6)啮合的传动蜗杆,安装在底座(1)上且输出轴与传动蜗杆连接的传动电机(8)。7.如权利要求1所述的一种可拆卸式机器人手臂,其特征在于,所述横臂(9)组件(3)包括安装在立臂(5)顶部的横臂(9),通过滚动轴承转动安装在横臂(9)上且位于横臂(9)靠近抓取组件(4)一端的调节轴(10),安装在横臂(9)内且输出轴与调节轴(10)连接的调节电机(11),驱动箱(12)安装在调节轴(10)上。
技术总结
本实用新型公开了一种可拆卸式机器人手臂。本实用新型包括底座,安装在底座上的立臂组件,安装在立臂组件顶部的横臂组件,安装在横臂组件上的抓取组件;抓取组件包括安装在横臂组件上的驱动箱,通过滚动轴承转动安装在驱动箱上的主轴,安装在主轴上且位于驱动箱顶部的驱动齿轮,安装在主轴上且位于驱动箱内的驱动蜗轮,通过滚动轴承转动安装在驱动箱内且与驱动蜗轮啮合的驱动蜗杆,安装在驱动箱内且输出轴与驱动蜗杆连接的驱动电机,安装在驱动箱上的抓手件。通过立臂组件、横臂组件抓取组件运动,使机器人手臂具有围绕X方向转动、Z方向转动的自由度。通过第一驱动杆、第一抓杆等的可拆卸结构,使用户可以对机器人手臂宽窄进行调节。调节。调节。
技术研发人员:陈宣俊 米晓磊 黄仁泽 郝宇航
受保护的技术使用者:吉林省赛科电气工程有限公司
技术研发日:2021.09.30
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。