1.本实用新型涉及一种三爪自定心机构,尤其涉及一种结构紧凑、适用于多规格尺寸待装夹工件的三爪自定心机构。
背景技术:
2.目前的定心机构有三爪卡盘,气动三爪、气动卡盘等,现有的定心机构属于标准件,价格偏高,使用范围较窄,针对非标件工件的装夹往往需要不同的夹具进行装夹定位,因此如何研究出一种适用多规格非标件的装夹定心机构是本实用新型丞待解决的问题。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种三爪自定心机构,具有结构紧凑、适用于多规格尺寸待装夹工件的特点。
4.为解决上述技术问题,本实用新型的技术方案为:一种三爪自定心机构,其创新点在于:所述三爪自定心机构包括支撑底板、设置在所述支撑底板上驱动机构、与所述驱动机构相连的夹爪组件、安装在所述支撑底板上可相对转动的转动轮、固定安装在所述转动轮上的凸轮轴承随动器,所述夹爪组件套设在所述凸轮轴承随动器上,所述支撑底板上设置有供所述夹爪组件往复运动的直线导轨,所述夹爪组件由三个竖直设置的夹爪单元组成,三个所述夹爪单元形成的夹爪组件的中心与所述转动轮的中心重合,待装夹工件位于三个所述夹爪单元所形成的装夹区域中。
5.优选的,所述支撑底板上设置有三个所述直线导轨,三个所述直线导轨分别与相应所述夹爪单元配合,三个所述直线导轨的走向均与所述转动轮相切,所述驱动机构与其中一个所述夹爪单元相连,且该直线导轨的走向和与之相连的所述驱动机构的运动方向一致;所述转动轮上设置有三个均匀分布在转动轮顶面上的所述凸轮轴承随动器,三个所述夹爪单元分别套设在相应所述凸轮轴承随动器上。
6.优选的,所述夹爪单元包括夹爪底板、固定安装在所述夹爪底板上的夹爪竖板、安装在所述夹爪竖板上远离所述夹爪底板一端的夹爪头,所述夹爪底板滑配安装在所述直线导轨上,所述夹爪底板上设置有供所述凸轮轴承随动器穿过的安装孔。
7.优选的,所述安装孔为圆孔或者腰形孔。
8.优选的,所述夹爪头包括芯部带定位孔的定位板,所述定位板上竖直设置有通过螺栓连接用于夹住待装夹工件的压紧轴承。
9.优选的,所述驱动机构为中心轴线水平设置且安装在支撑底板上的驱动气缸,所述驱动气缸与夹爪组件之间设置有安装在驱动气缸传动轴上的连接头。
10.优选的,所述支撑底板上设置有供所述驱动气缸安装的气缸挡板,所述气缸挡板竖直安装在驱动气缸本体和所述连接头之间,所述驱动气缸传动轴穿过所述气缸挡板。
11.优选的,所述连接头包括连接杆、设置在所述连接杆上的内螺母、与所述连接杆直连的连接主体,所述驱动气缸传动轴抵在所述连接杆上。
12.优选的,所述支撑底板上设置有位于所述驱动气缸两侧的限位组件。
13.优选的,所述限位组件包括套设在驱动气缸上的环形铁片、安装在所述支撑底板上的限位块、安装在所述限位块上且中心轴线水平设置的限位齿轮,所述限位齿轮的齿面抵在所述驱动气缸上,环形铁片的一端紧固在所述限位块中。
14.本实用新型的优点在于:通过采用上述结构,驱动气缸推动转动轮转动,转动轮圆周上均布有三个凸轮轴承随动器,转动轮转动时带动三个夹爪单元往中心运动,三爪的中心与转动轮同心,转动轮将旋转运动转换为三个夹爪单元的直线运动,三个夹爪沿直线导轨直线运动。
附图说明
15.下面结合附图和具体实施方式对本实用新型作进一步详细的描述。
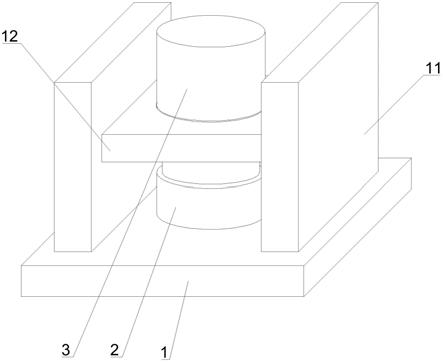
16.图1是本实用新型一种三爪自定心机构的结构示意图。
17.图中:1-支撑底板、2-驱动机构、3-转动轮、4-凸轮轴承随动器、5-直线导轨、6-夹爪单元、61-夹爪底板、62-夹爪竖板、63-夹爪头、64-安装孔、65-压紧轴承、7-连接头、8-气缸挡板、91-环形铁片、92-限位块、93-限位齿轮。
具体实施方式
18.本实用新型的三爪自定心机构包括支撑底板1、设置在支撑底板上驱动机构2、与驱动机构相连的夹爪组件、安装在支撑底板上可相对转动的转动轮3、固定安装在转动轮上的凸轮轴承随动器4,夹爪组件套设在所述凸轮轴承随动器上,支撑底板上设置有供夹爪组件往复运动的直线导轨5,夹爪组件由三个竖直设置的夹爪单元6组成,三个夹爪单元形成的夹爪组件的中心与转动轮的中心重合,待装夹工件位于三个夹爪单元所形成的装夹区域中。通过采用上述结构,驱动气缸推动转动轮转动,转动轮圆周上均布有三个凸轮轴承随动器,转动轮转动时带动三个夹爪单元往中心运动,三爪的中心与转动轮同心,转动轮将旋转运动转换为三个夹爪单元的直线运动,三个夹爪沿直线导轨直线运动。本装置所有的零件都较简单,采用自制件和个别标准件组合的方式,降低了成本,通用性比较强。
19.上述的支撑底板上设置有三个直线导轨,三个直线导轨分别与相应夹爪单元配合,三个所述直线导轨的走向均与转动轮相切,驱动机构与其中一个夹爪单元相连,且该直线导轨的走向和与之相连的驱动机构的运动方向一致。转动轮上设置有三个均匀分布在转动轮顶面上的凸轮轴承随动器4,三个夹爪单元分别套设在相应凸轮轴承随动器上。夹爪单元包括夹爪底板61、固定安装在夹爪底板上的夹爪竖板62、安装在夹爪竖板上远离夹爪底板一端的夹爪头63,夹爪底板滑配安装在直线导轨上,夹爪底板上设置有供凸轮轴承随动器穿过的安装孔64,安装孔为圆孔或者腰形孔。三个夹爪单元上面带有压紧轴承,夹紧工件后,工件可以自由转动,夹爪头包括芯部带定位孔的定位板,所述定位板上竖直设置有通过螺栓连接用于夹住待装夹工件的压紧轴承。
20.上述的驱动机构为中心轴线水平设置且安装在支撑底板上的驱动气缸,驱动气缸与夹爪组件之间设置有安装在驱动气缸传动轴上的连接头7。支撑底板上设置有供所述驱动气缸安装的气缸挡板8,气缸挡板竖直安装在驱动气缸本体和连接头之间,驱动气缸传动轴穿过气缸挡板。连接头包括连接杆、设置在连接杆上的内螺母、与连接杆直连的连接主
体,驱动气缸传动轴抵在所述连接杆上。
21.上述的支撑底板上设置有位于所述驱动气缸两侧的限位组件。限位组件包括套设在驱动气缸上的环形铁片91、安装在支撑底板上的限位块92、安装在限位块上且中心轴线水平设置的限位齿轮93,限位齿轮的齿面抵在驱动气缸上,环形铁片的一端紧固在限位块中。
22.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制性技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
技术特征:
1.一种三爪自定心机构,其特征在于:所述三爪自定心机构包括支撑底板、设置在所述支撑底板上驱动机构、与所述驱动机构相连的夹爪组件、安装在所述支撑底板上可相对转动的转动轮、固定安装在所述转动轮上的凸轮轴承随动器,所述夹爪组件套设在所述凸轮轴承随动器上,所述支撑底板上设置有供所述夹爪组件往复运动的直线导轨,所述夹爪组件由三个竖直设置的夹爪单元组成,三个所述夹爪单元形成的夹爪组件的中心与所述转动轮的中心重合,待装夹工件位于三个所述夹爪单元所形成的装夹区域中。2.如权利要求1所述的一种三爪自定心机构,其特征在于:所述支撑底板上设置有三个所述直线导轨,三个所述直线导轨分别与相应所述夹爪单元配合,三个所述直线导轨的走向均与所述转动轮相切,所述驱动机构与其中一个所述夹爪单元相连,且该直线导轨的走向和与之相连的所述驱动机构的运动方向一致;所述转动轮上设置有三个均匀分布在转动轮顶面上的所述凸轮轴承随动器,三个所述夹爪单元分别套设在相应所述凸轮轴承随动器上。3.如权利要求2所述的一种三爪自定心机构,其特征在于:所述夹爪单元包括夹爪底板、固定安装在所述夹爪底板上的夹爪竖板、安装在所述夹爪竖板上远离所述夹爪底板一端的夹爪头,所述夹爪底板滑配安装在所述直线导轨上,所述夹爪底板上设置有供所述凸轮轴承随动器穿过的安装孔。4.如权利要求3所述的一种三爪自定心机构,其特征在于:所述安装孔为圆孔或者腰形孔。5.如权利要求3所述的一种三爪自定心机构,其特征在于:所述夹爪头包括芯部带定位孔的定位板,所述定位板上竖直设置有通过螺栓连接用于夹住待装夹工件的压紧轴承。6.如权利要求1所述的一种三爪自定心机构,其特征在于:所述驱动机构为中心轴线水平设置且安装在支撑底板上的驱动气缸,所述驱动气缸与夹爪组件之间设置有安装在驱动气缸传动轴上的连接头。7.如权利要求6所述的一种三爪自定心机构,其特征在于:所述支撑底板上设置有供所述驱动气缸安装的气缸挡板,所述气缸挡板竖直安装在驱动气缸本体和所述连接头之间,所述驱动气缸传动轴穿过所述气缸挡板。8.如权利要求6所述的一种三爪自定心机构,其特征在于:所述连接头包括连接杆、设置在所述连接杆上的内螺母、与所述连接杆直连的连接主体,所述驱动气缸传动轴抵在所述连接杆上。9.如权利要求6所述的一种三爪自定心机构,其特征在于:所述支撑底板上设置有位于所述驱动气缸两侧的限位组件。10.如权利要求9所述的一种三爪自定心机构,其特征在于:所述限位组件包括套设在驱动气缸上的环形铁片、安装在所述支撑底板上的限位块、安装在所述限位块上且中心轴线水平设置的限位齿轮,所述限位齿轮的齿面抵在所述驱动气缸上,环形铁片的一端紧固在所述限位块中。
技术总结
本实用新型公开了一种三爪自定心机构包括支撑底板、驱动机构、与驱动机构相连的夹爪组件、安装在支撑底板上的转动轮、固定安装在转动轮上的凸轮轴承随动器,夹爪组件套设在凸轮轴承随动器上,支撑底板上设置有供夹爪组件往复运动的直线导轨,夹爪组件由三个竖直设置的夹爪单元组成,三个夹爪单元形成的夹爪组件的中心与转动轮的中心重合,待装夹工件位于三个夹爪单元所形成的装夹区域中。通过采用上述结构,驱动气缸推动转动轮转动,转动轮圆周上均布有三个凸轮轴承随动器,转动轮转动时带动三个夹爪单元往中心运动,三爪的中心与转动轮同心,转动轮将旋转运动转换为三个夹爪单元的直线运动,三个夹爪沿直线导轨直线运动。三个夹爪沿直线导轨直线运动。三个夹爪沿直线导轨直线运动。
技术研发人员:胡冲
受保护的技术使用者:苏州工业园区迈泰克自动化技术有限公司
技术研发日:2021.08.10
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。