1.本发明属于电液控制技术领域,具体是一种折臂式高空作业车的臂架操控电路及方法。
背景技术:
2.目前,应用广泛的高空作业车主要有折叠臂式高空作业车与伸缩臂式高空作业车。折臂式高空作业车具有性价比高且耐用的优势,在铁路建设、电力维修等领域应用广泛。其液压系统多采用配置多路选择阀的进油比例调速阀液压系统,多路选择阀的功能是实现用户操控动作的选择,如臂架变幅、转台回转、臂架伸缩、卷扬起落等;在多路选择阀的入口配置一只旁路节流调速阀,用于调节所选择的操控动作的速度。在实际操作时,每个工作臂的动作所需的液压油流量是不同,但传统操控电路提供给所有动作相同的液压流量,造成用户操作体验感差。
3.臂架操控电路用于配合液压系统完成臂架的动作和速度控制。使得操控高空作业车臂架动作更加快捷方便。目前的方案使用钮子开关选择操控动作类型,使用电比例手柄操控所选择动作的速度。
4.电比例手柄将操作者推动手柄的角度转换为臂架运动速度控制电压信号,放大器采集速度控制电压信号将其等比例转换为调速阀比例电磁铁驱动电流,从而通过控制液压油流量实现对臂架运动速度的控制。但是折臂式高空作业车的不同操纵动作所需要的液压流量不同,如小臂变幅起、小臂变幅落、转台顺转、转台逆转与下臂变幅落动作所需的液压油流量,远小于上臂变幅起、上臂变幅落、下臂变幅起动作。但是共用的旁路节流阀、电比例手柄与放大器提供所有动作相同的液压流量。因此,当用户操作需要液压流量小的动作时,如转台回转动作、小臂变幅动作与下臂下降动作,需要小心翼翼地推动电比例手柄,以避免速度过快造成臂架冲击和晃动。
5.目前部分折臂式高空作业车将进油比例调速阀液压系统升级为负载敏感式比例多路换向阀液压系统,负载敏感式比例多路换向阀液压系统每个动作具有独立的放大器和调速阀,从而可以有效解决上述问题。但却大大增大了产品成本,增加了用户的费用。
6.中国实用新型专利cn202369350u高空作业车工作臂起升操作的自动加速控制系统,公开了一种自动加速系统,但是其控制方案为通过继电器触点的切换,控制两路不同电平值电压信号输入底盘ecu油门控制信号采集端口,通过调节发动机转速进而调节臂架速度。但该方案需要频繁调节发动机转速,因液压系统功率远低于底盘发动机功率,导致发动机喷射的燃油燃烧不完全,长时间使用易形成积碳,且发动机转速变动较比例阀缓慢,存在油耗高、发动机易损坏及调速慢等缺点。
技术实现要素:
7.为了解决上述现有技术中存在的问题,本发明提供了一种一种折臂式高空作业车的臂架操控电路及方法,能够自动适应不同类型动作对速度控制的要求,且结构简单、容易
实现,具有低成本、高可靠性、高安全性的优点。
8.本发明采用的技术方案:一种折臂式高空作业车的臂架操控电路,包括电比例手柄,与电比例手柄电性连接的比例放大器,与比例放大器电性连接的动作控制开关,与动作控制开关电性连接的动作选择阀,所述的电比例手柄的输入端串联分压电阻,所述的动作控制开关电性连接速度选择继电器的线圈,所述的速度选择继电器的常闭开关与分压电阻并联。
9.优选的,所述的电比例手柄采用电位计型电比例手柄,所述的比例放大器采用数字比例放大器,所述的分压电阻采用可调电阻器。
10.优选的,所述的动作控制开关采用单联双边自复位钮子开关,所述的动作控制开关有四个,分别是上臂变幅控制开关、下臂变幅控制开关、小臂变幅控制开关和转台回转控制开关。
11.优选的,所述的动作选择阀有四个,分别是上臂变幅阀、下臂变幅阀、小臂变幅阀、转台回转阀。
12.优选的,所述的速度选择继电器有五个,分别是回转顺继电器、回转逆继电器、小臂落继电器、小臂起继电器、下臂落继电器;所述的回转顺继电器和回转逆继电器与转台回转控制开关电性连接;所述的小臂落继电器和小臂起继电器与小臂变幅控制开关电性连接;所述的下臂落继电器与下臂变幅控制开关电性连接。
13.优选的,所述的分压可调电阻有五个,被分别与回转顺继电器、回转逆继电器、小臂落继电器、小臂起继电器、下臂落继电器的常闭开关并联。
14.一种折臂式高空作业车的臂架操控方法,包括以下步骤:
15.s1:将车辆动作分为小流量动作和大流量动作,其中小流量动作包括:小臂变幅起、小臂变幅落、转台顺转、转台逆转与下臂变幅落;大流量动作包括:上臂变幅起、上臂变幅落、下臂变幅起;
16.s2:所有的小流量动作控制开关电性连接速度选择继电器,速度选择继电器的常闭开关并联分压电阻;
17.s3:当按下小流量动作控制开关后,对应的速度选择继电器线圈得电,常闭开关打开,分压电阻接入比例手柄供电电路,使比例手柄的参考电压下降;
18.s4:当按下大流量动作控制开关后,分压电阻不接入比例手柄供电电路,对应的动作选择阀连通对应管路,实现动作。
19.本发明的有益效果:1.该电路配合液压系统实现对折臂式高空作业车的电控操作,控制电路能够控制液压系统适应不同工作臂的不同动作对液压油流量的需求,控制灵活,改善用户操作手感;2、该电路几乎没有控制延迟,避免了处理器运算延迟可能对臂架操控造成的不良影响;3、该电路简单、可靠,容易实现且安全性较高;4、该电路降低了控制系统的整体成本。
附图说明
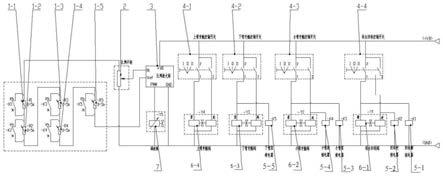
20.图1是本发明的电气原理图;
21.图中,1-1、分压可调电子r1,1-2、分压可调电子r2,1-3、分压可调电子r3,1-4、分压可调电子r4,1-5、分压可调电子r5,2、电位计型电比例手柄,3、数字比例放大器,4-1、上
臂变幅控制开关,4-2、下臂变幅控制开关,4-3、小臂变幅控制开关,4-4、转台回转控制开关,5-1、回转顺继电器,5-2、回转逆继电器,5-3、小臂落继电器,5-4、小臂起继电器,5-5、下臂落继电器,6-1、转台回转阀,6-2、小臂变幅阀,6-3、下臂变幅阀,6-4、上臂变幅阀,7、调速阀。
具体实施方式
22.为了进一步说明本发明技术方案的细节及其优点,现结合附图和实施例进行说明。
23.如图1所示,电位计型电比例手柄2的输出端连接到数字比例放大器3的输入端,数字比例放大器3将采集的输入信号归一化后,通过mosfet高速开关电路输出高频pwm信号,数字比例放大器3输出端连接调速阀7的比例电磁铁。数字比例放大器3通过检测电阻检测电磁铁线圈电流,并进行电流调节以补偿系统供电电压波动和电磁铁线圈电阻变化引起的电流误差。在电位计型电比例手柄2供电电路中增加一系列串联的分压可变电阻(r1-r5),通过选择不同的操作动作时接入不同的分压电阻改变电比例手柄的参考电压,从而影响数字比例放大器的输出驱动电流,实现对比例电磁铁阀芯位移以及精确灵活的液压油流量控制,达到臂架动作的平缓式控制效果。
24.结合折臂式高空作业车的实际情况,将车辆动作分为小流量动作和大流量动作,其中小流量动作包括:小臂变幅起、小臂变幅落、转台顺转、转台逆转与下臂变幅落;大流量动作包括:上臂变幅起、上臂变幅落、下臂变幅起。
25.动作控制开关选用单联双边自复位钮子开关。扳动钮子开关选择所需液压油流量较小动作时,对应动作的动作选择阀电磁铁线圈得电,动作选择阀的p口联通对应动作的管路;同时,对应动作的速度选择继电器得电,对应动作的速度选择继电器常闭触点打开,与速度选择继电器常闭触点并联的对应分压可变电阻(r1-r5)接入电路。扳动钮子开关选择所需液压油流量较大动作时,对应动作的动作选择阀电磁铁线圈得电,动作选择阀p口联通对应动作的管路,速度选择继电器线圈均不得电,分压可变电阻(r1-r5)被速度选择继电器常闭触点短路,均不接入回路中。其中,分压可变电阻(r1-r5)选用可调电阻器,根据选用的电比例手柄的总阻值在4kω-5kω,阻值的可调范围选取为0-5kω,可实现根据不同的臂体动作所需的液压油流量单独调整与速度选择继电器常闭触点并联的对应分压可变电阻的阻值,达到液压油流量的精确灵活控制。
26.电比例手柄参考电压信号为参考电压vref,电比例手柄输出电压信号等于手柄扳动角度乘以参考电压vref。其中,参考电压vref为数字比例放大器3提供的高级精度直流参考电源。选择所需液压油流量较小动作时,由于电阻的分压作用,电比例手柄参考电压信号改变为kvref,电比例手柄输出电压信号等于手柄扳动角度乘以参考电压kvref。若电比例手柄的总阻值为rj,当通过钮子开关选择转台顺转动作时,当通过钮子开关选择转台逆转动作时,当通过钮子开关选择小臂变幅落动作时,当通过钮子开关选择下臂变幅落动作时,当通过钮子开关选择小臂变幅起动作时,
27.由于操作所需液压油流量较小动作时,如转台顺转、转台逆转、小臂变幅落、下臂变幅落及小臂变幅起,电比例手柄输出信号分别自动降低为操作所需液压油流量较大动作时电比例手柄输出信号的及因此在操作转台顺转、转台逆转、小臂变幅落、下臂变幅落及小臂变幅起动作时,电比例手柄在扳动相同角度时的液压油流量,分别是操作上臂变幅起、上臂变幅落、下臂变幅起动作时液压油流量的及从而实现了不同的臂架动作自动匹配所需的液压油流量。
28.同时,动作控制钮子开关还兼具使能按键的功能,用户须同时操作臂架动作控制钮子开关与电比例手柄时,方能操控臂架作业。因此可避免误碰电比例手柄或电比例手柄损坏而引发的臂架误动作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
