1.本发明属于软体推动器相关技术领域,更具体地,涉及一种基于离散磁畴的软体推动器及其定向控制方法。
背景技术:
2.推进器可以用于产生推进和/或推力,而软体推进器由于其良好的环境共融性,对于环境勘探和环境保护有着非常大的应用前景。
3.现有软体推动器在液体表面的定向方法或由驱动器的非对称性运动控制,其存在结构复杂、体积大等限制,或是由预置的对环境各向异性的响应行为决定的,存在着随着推动器制造完成便确定,无法改变等限制,且定向过程依赖于驱动过程同时进行,使得定向控制的局限性较大,无法原位转向,转向性能调控麻烦等。如专利cn110733057a公开了一种磁控光驱软体机器人,具备控制信号与驱动源施加位置、方向与角度无严格限制、非接触式以及软体机器人改变移动方向时无需转动的优点,以解决传统的光驱软体机器人控制方式需要把信号对准在不同位置,实现不同的运动方向控制,调控较为复杂的问题;但其通过磁场远程控制机器人的运动形态,从而使其沿特定方向运动,但其运动方向受结构限制,无法沿空间任意方向运动;又如专利cn113319888a公开了一种能够定向弹跳的气动软体机器人,所述能够定向弹跳的气动软体机器人包括壳体,所述壳体形成有空腔,所述壳体包括底盖,所述底盖为半球壳,所述底盖设置有切口,贯穿底盖,且关于所述底盖的至少一个对称面是非对称的;在空腔未充气的自然状态下,底盖向空腔凹陷,切口被挤压而处于闭合状态,空腔是封闭的。通过气管向空腔通气,底盖发生非对称突跳失稳,达到失稳状态。伴随着底盖弹性能的释放,切口打开,高压气体从切口喷出,底盖向下变形冲击地面,使软体机器人定向弹跳,即所述的启动软体机器人通过结构上的非对称性实现定向移动。因此亟需进一步提出新型的可预先编程、响应稳定迅速、可实时在线控制的软体推动器定向控制方法。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一种基于离散磁畴的软体推动器及其定向控制方法,所述方法将定向控制模块化,利用离散化磁畴实现软体机器人的定向控制,通过改写磁畴方向、改变磁片数量、大小、磁粒子浓度、磁化的强度和驱动磁场的强度便可以调控推动器转动的角速度与稳定性,无需对推动器本体进行重新设计,使得软体推动器的定向控制变得更加简单高效。
5.为实现上述目的,按照本发明的一个方面,提供了一种基于离散磁畴的软体推动器定向控制方法,所述方法包括以下步骤:
6.(1)在软体推动器的推动器主体内嵌入具有预定磁畴方向的磁片,磁片是经磁化磁场磁化后的,推动器主体不具备磁性;
7.(2)对所述软体推动器施加驱动磁场,所述磁片在所述驱动磁场的作用下受到一个水平旋转扭矩,并将受到的水平旋转扭矩传递给推动器主体,使得所述推动器主体绕自
身轴转动,直至磁片的磁畴方向与驱动磁场的方向一致,完成软体推动器的定向控制。
8.进一步地,磁化磁场的磁场强度大于2t。
9.进一步地,所述磁片的数量为多个,多个所述磁片间隔固定在所述推动器主体上。
10.进一步地,软体推动器还包括微处理器及磁场模块,所述磁场模块用于产生驱动磁场,所述微处理器用于控制所述磁场模块;所述微处理器内存储有磁片的磁畴方向及磁粒子浓度、磁片占推动器主体的体积比、磁化磁场的磁场强度、旋转角速度与磁片的磁畴方向及磁粒子浓度、磁片占推动器主体的体积比、磁化磁场的磁场强度及驱动磁场的磁场强度的关系数据。
11.进一步地,步骤(2)中,所述微处理器首先根据所要达到的方向及推动器主体所要的旋转角速度、以及自身存储的数据进行处理以得到所需的驱动磁场的磁场方向与磁场强度,进而控制磁场模块施加相应的驱动磁场给所述磁片。
12.进一步地,磁片的组分包括质量比为20:1:40的pdms预聚物、交联剂和ndfeb磁粉颗粒。
13.进一步地,ndfeb磁粉颗粒的粒径为5微米。
14.本发明还提供了一种基于离散磁畴的软体推动器,所述软体推动器采用如上所述的基于离散磁畴的软体推动器定向控制方法进行定向。
15.总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的基于离散磁畴的软体推动器及其定向控制方法主要具有以下有益效果:
16.1.对所述软体推动器施加驱动磁场,所述磁片在所述驱动磁场的作用下受到一个水平旋转扭矩,并将受到的水平旋转扭矩传递给推动器主体,使得所述推动器主体绕自身轴转动,直至磁片的磁畴方向与驱动磁场的方向一致,完成软体推动器的定向控制,如此基于离散磁畴的软体推动器的定向控制方法具有无缆、响应稳定高效、精确精度高等独特特性。
17.2.本发明可方便的改写磁片的磁畴方向,从而满足不同场景的定向需求,为多场景重构和配置提供了灵活的操作窗口,也为多机器人系统集群控制、离散的可寻址控制提供新的设计和控制方法。
18.3.本发明结构简单,可以将推动器的定向控制模块化,仅通过改变磁片的所占软体推动器本体的体积(可通过调节磁片的数量与大小)、磁粒子浓度、磁化的强度和驱动磁场的强度便可以调控推动器转动的角速度与稳定性,无需对推动器本体进行重新设计。
19.4.所述微处理器首先根据所要达到的方向及推动器主体所要的旋转角速度、以及自身存储的数据进行处理以得到所需的驱动磁场的磁场方向与磁场强度,进而控制磁场模块施加相应的驱动磁场给所述磁片,如此可以实现实时、快速、准确地调控推动器主体的旋转角速度与稳定性、以及方向。
20.5.本发明中的离散集成的磁畴可以在群体机器人系统中进行梯度、离散的编程设计,以实现在同一驱动磁场下具有不同响应的、复杂的群体行为控制。
附图说明
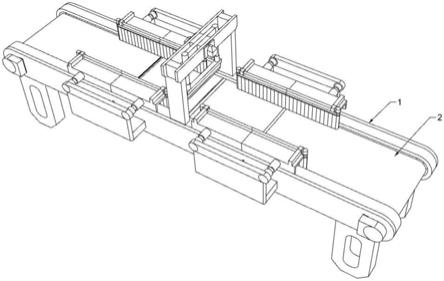
21.图1是本发明提供的一种基于离散磁畴的软体推动器的局部结构示意图。
22.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:110-推动器主
体,120-磁片。
具体实施方式
23.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
24.请参阅图1,本发明提供的一种基于离散磁畴的软体推动器定向控制方法主要包括以下步骤:
25.步骤一,在软体推动器的推动器主体内嵌入具有预定磁畴方向的磁片,磁片是经磁化磁场磁化后的,推动器主体不具备磁性。
26.具体地,软体推动器包括推动器主体110、微处理器及磁场模块,所述磁场模块用于产生驱动磁场,所述微处理器用于控制所述磁场模块。所述推动器主体110内嵌设有多个间隔设置的磁片120,所述磁片120是在强脉冲磁场(>2t)磁化的磁片。可以理解,所述磁片120可以可拆卸地连接于所述推动器主体110。
27.所述磁片120的材料包括聚二甲基硅氧烷(pdms硅橡胶)及ndfeb磁粉颗粒,ndfeb磁粉颗粒的粒径为5微米;所述磁片120的组分包括质量比为20:1:40的pdms预聚物、交联剂和ndfeb磁粉颗粒。所述推动器主体110是由不具磁性的碳黑掺杂的pdms硅橡胶倒模、激光加工而成,且其不具有各向异性的磁性。
28.方向控制时的角速度、趋向震荡的稳定性取决于所述磁片120占所述推动器主体110的体积比、磁片120的磁粒子浓度、磁化磁场的磁场强度及驱动磁场的磁场强度。方向的控制取决于磁片120的磁畴方向和驱动磁场的方向之间的相对关系,定向扭矩会使得磁片120的磁畴方向与驱动磁场的磁场方向保持一致。
29.所述微处理器内存储有磁片的磁畴方向及磁粒子浓度、磁片占推动器主体的体积比、磁化磁场的磁场强度、旋转角速度与磁片的磁畴方向及磁粒子浓度、磁片占推动器主体的体积比、磁化磁场的磁场强度及驱动磁场的磁场强度的关系数据,其依据内部存储的数据来实时、快速、准确地控制所述磁场模块产生所需磁场强度及所需磁场方向的驱动磁场,进而使得推动器主体110具有所需的旋转角速度,且旋转到预定的方向。
30.步骤二,对所述软体推动器施加驱动磁场,所述磁片在所述驱动磁场的作用下受到一个水平旋转扭矩,并将受到的水平旋转扭矩传递给推动器主体,使得所述推动器主体绕自身轴转动,直至磁片的磁畴方向与驱动磁场的方向一致,完成软体推动器的定向控制。
31.具体地,所述微处理器控制所述磁场模块产生驱动磁场,所述磁片120在所述驱动磁场的作用下受到扭矩,并将受到的扭矩传递给所述推动器主体110,使得所述推动器主体110绕自身轴发生偏转(即发生自转,原位转动,绕自身的某轴旋转),直至所述磁片120的磁畴方向与驱动磁场的磁场方向一致,实现了原位定向。
32.本实施方式中,所述微处理器首先根据所要达到的方向及推动器主体110所要的旋转角速度、以及内部存储的数据来处理以得到所需的驱动磁场的磁场方向及磁场强度,进而控制磁场模块施加相应的驱动磁场给所述磁片120。
33.所述推动器主体110的转向角速度与在平衡位置震荡的衰减速度与磁片120的数
量、大小、磁粒子掺杂的浓度、磁化磁场强度及外加驱动磁场强度相关。
34.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。