1.本实用新型属于新型纺织机械领域,具体涉及一种磁悬浮圆周引纬机构。
背景技术:
2.引纬机构是纺织工业上织机的关键部件,引纬机构的结构形式、运动精度以及稳定性直接影响织机的速度、效率和织物的质量。圆筒织机在引纬时需要引纬器携纬纱绕芯模一周,因此引纬机构就需要让引纬器沿运动轨迹绕芯模做圆周运动。
3.现有的三维多层圆筒织机的圆周引纬机构多采用人工手动引纬或采用机械结构复杂的齿轮齿条引纬,引纬速度慢,机械摩擦大,效率低。
技术实现要素:
4.为了解决现有三维多层圆筒织机引纬机构运动速度慢、效率低、机械摩擦大等问题,本实用新型目的在于提供一种磁悬浮圆周引纬机构。
5.本实用新型所采用的技术方案为:
6.一种磁悬浮圆周引纬机构,包括引纬底板,引纬底板上设置有引纬槽轨,引纬槽轨内安装有引纬器,引纬槽轨底部设置有第一悬浮磁轨,引纬槽轨两侧壁均设置有驱动磁轨;
7.引纬器底部设置有第二悬浮磁轨,第一悬浮磁轨和第二悬浮磁轨用于驱动引纬器悬浮在引纬槽轨内部;
8.引纬器内部设置有若干磁极感应器,若干磁极感应器与驱动磁轨用于驱动引纬器沿引纬槽轨运动;
9.引纬器上安装有携纱器,携纱器用于带动纱线与引纬器同步运动。
10.作为可选的,磁极感应器为e型线圈组,e型线圈组包括线圈固定座、e 型线圈和两个磁极传感器,两个磁极传感器对称设置在线圈固定座两侧,线圈固定座上设置有e型线圈。
11.作为可选的,线圈固定座依次等间距设置有三个铁芯,e型线圈安装在中间铁芯上,当e型线圈通电时,同一线圈固定座上的相邻铁芯具有不同磁性。
12.作为可选的,引纬槽轨为圆环形槽轨,引纬器包括弧形的上引纬梭板和下引纬梭板,上引纬梭板和下引纬梭板之间均匀设置有若干磁极感应器,第二悬浮磁轨设置在下引纬梭板底部。
13.作为可选的,上引纬梭板和下引纬梭板之间均匀设置有四个磁极感应器,相邻两磁极感应器的磁极朝向不同侧的驱动磁轨。
14.作为可选的,上引纬梭板和下引纬梭板之间还设置有控制板,控制板用于若干磁极感应器的磁极变化;上引纬梭板和下引纬梭板的端面均设置有若干导向轮。
15.作为可选的,两驱动磁轨设置在引纬槽轨两侧壁同一高度位置,驱动磁轨包括若干个驱动磁极,相邻两个驱动磁极之间具有不同磁性。
16.作为可选的,携纱器包括纬纱管、导纱杆、纬纱张力装置和两个纱管固定座,两个
纱管固定座固定安装在引纬器顶部,纬纱管安装在两个纱管固定座之间,导纱杆的一端设置在纱管固定座的一侧,导纱杆的另一端安装有纬纱张力装置。
17.作为可选的,引纬底板上开设有若干个交互孔,若干交互孔将引纬槽轨均分成若干个弧形槽轨段,每个弧形槽轨段上均设置有位置传感器,位置传感器用于检测引纬器的位置信息。
18.作为可选的,第一悬浮磁轨和第二悬浮槽轨对应位置具有相同的磁极。
19.本实用新型的有益效果为:
20.本实用新型提供了一种磁悬浮圆周引纬机构,本实用新型通过采用磁力悬浮和磁力驱动引纬器运动,使引纬器在槽轨内做圆周运动,速度快,机械摩擦少,无机械冲击,引纬效率高,噪声小,可实现全自动引纬,大大降低了操作难度,提高了三维多层圆筒织机的生产效率。因此,本实用新型不仅结构简单,节省劳动力,而且工作效率高。
附图说明
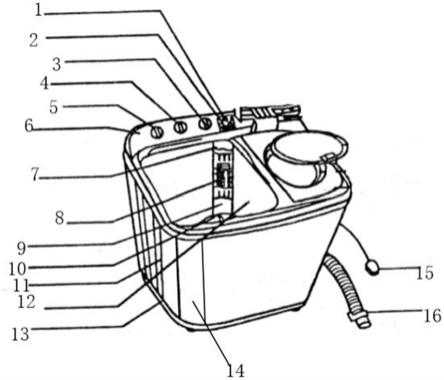
21.图1是本实用新型的结构示意图;
22.图2是引纬槽轨的结构示意图;
23.图3是引纬器的结构示意图;
24.图4是携纱器的结构示意图;
25.图5是磁极感应器的结构示意图;
26.图6是引纬器一种运动状态的力学分析示意图;
27.图7是引纬器另一种运动状态的力学分析示意图;
28.图8是引纬器在引纬槽轨中的悬浮位置示意图;
29.图中:1-引纬底板,2-引纬槽轨,21-安装侧壁,23-驱动磁轨,22-第一悬浮磁轨,3-引纬器,31-导向轮,32-磁极感应器,33-上引纬梭板,34-下引纬梭板, 4-携纱器,41-纱管固定座,42-纬纱管,43-导纱杆,44-纬纱张力装置,51-磁极传感器,52-线圈固定座,53-e型线圈。
具体实施方式
30.实施例一:
31.在本实施例中,如图1、图2、图3和图8所示,一种磁悬浮圆周引纬机构,包括引纬底板1,引纬底板1上设置有引纬槽轨2,引纬槽轨2内安装有引纬器 3,引纬槽轨2底部设置有第一悬浮磁轨23,引纬槽轨2两侧壁均设置有驱动磁轨22;引纬器3底部设置有第二悬浮磁轨,第一悬浮磁轨23和第二悬浮磁轨用于驱动引纬器3悬浮在引纬槽轨2内部;引纬器3内部设置有若干磁极感应器32,若干磁极感应器32与驱动磁轨22用于驱动引纬器3沿引纬槽轨2运动;引纬器3上安装有携纱器4,携纱器4用于带动纱线与引纬器3同步运动。
32.在本实施例中,本实用新型通过在引纬器3和引纬槽轨2之间设置有第一悬浮磁轨23和第二悬浮磁轨,使得引纬器3能够悬浮在引纬槽轨2上方;且通过在引纬槽轨2的两侧壁上设置有驱动磁轨22,在引纬器3内设置有磁极感应器32,磁极感应器32根据驱动磁轨23的刺激变化而产生不同磁极,进而通过磁极变化驱动引纬器3沿着驱动磁轨23运动,引纬器3上的携纱器4牵引纱线跟随引纬器3运动;通过采用磁力悬浮和磁力驱动引纬器3运动,使引
纬器3 在引纬槽轨2内运动,速度快,机械摩擦少,无机械冲击,引纬效率高,噪声小,可实现全自动引纬,大大降低了操作难度,提高了三维多层圆筒织机的生产效率。因此,本实用新型不仅结构简单,节省劳动力,而且工作效率高。
33.在本实施例中,如图5所示,具体的,磁极感应器32为e型线圈组,e型线圈组包括线圈固定座52、e型线圈53和两个磁极传感器51,两个磁极传感器51对称设置在线圈固定座52两侧,线圈固定座52上设置有e型线圈53;线圈固定座52依次等间距设置有三个铁芯,e型线圈53安装在中间铁芯上,当e型线圈53通电时,同一线圈固定座52上的相邻铁芯具有不同磁性。
34.在本实施例中,磁极感应器32通过对e型线圈53通电,使得e型线圈53 产生电磁场,从而使得线圈固定座52产生三个电磁极,且由于中间的电极位于 e型线圈53内部,因此,中间的电磁极与两侧的电磁极磁性不同;具体的,产生电磁场的电源为设置在引纬器3内部的电池。
35.在本实施例中,如图3所示,具体的,引纬槽轨2为圆环形槽轨,引纬器 3包括弧形的上引纬梭板33和下引纬梭板34,上引纬梭板33和下引纬梭板34 之间均匀设置有若干磁极感应器32,第二悬浮磁轨设置在下引纬梭板34底部。
36.在本实施例中,如图3所示,具体的,上引纬梭板33和下引纬梭板34之间均匀设置有四个磁极感应器32,相邻两磁极感应器32的磁极朝向不同侧的驱动磁轨22。
37.在本实施例中,作为可选的,上引纬梭板33和下引纬梭板34之间还设置有控制板,控制板用于若干磁极感应器32的磁极变化;上引纬梭板33和下引纬梭板34的端面均设置有若干导向轮31。
38.在本实施例中,具体的,控制板选用stm32单片机开发板与双路h桥电路板,并用于同时控制四个e型线圈中的电流方向和大小,进而控制线圈固定座52三个铁芯的磁性变化。
39.在本实施例中,如图3所示,具体的,上引纬梭板33上端面和下引纬梭板 34的下端面均设置有四个导向轮31,四个导向轮31分别分布在上引纬梭板33 上端面或下引纬梭板34下端面的四个顶角处。
40.在本实施例中,如图2所示,两驱动磁轨22设置在引纬槽轨2两侧壁同一高度位置,驱动磁轨22包括若干个驱动磁极,相邻两个驱动磁极之间具有不同磁性,驱动磁极均为永磁体。
41.在本实施例中,具体的,引纬槽轨2包括两安装侧壁21和底壁,第一悬浮磁轨22安装在底壁上,驱动磁轨23安装在两安装侧壁21的同一高度,同时两安装侧壁21上设有防止引纬器3脱离引纬槽轨2的限位部。
42.在本实施例中,如图8所示,第一悬浮磁轨23和第二悬浮槽轨对应位置具有相同的磁极。
43.在本实施例中,具体的,磁极传感器51固定在e型线圈53运动方向的前后两侧,前后两侧的磁极传感器51分别用于在不同的运动方向时,对e型线圈 53侧方的驱动磁轨23前方即时的磁极变化,e型线圈53采用e型铁块,且在铁块中间的铁芯上缠绕铜线制成,共采用4个e型线圈固定在引纬梭板上,共同驱动引纬梭板。e型线圈53固定在上引纬梭板33和下引纬梭板34之间,携纱器4安装在上引纬梭板33上。下引纬梭板34底部的第二悬浮磁轨与引纬槽轨2底部的第一悬浮磁轨23均为永磁铁磁轨,且第二悬浮磁轨和第一悬浮磁轨23对应位
置的磁极具有相同磁性,即都为n极磁轨或者均为s极磁轨,从而形成相互排斥的作用力,使引纬器3悬浮在引纬槽轨2内,而通电后的e型线圈53在磁场中受到牵引力沿圆周方向运动,完成圆周引纬运动。当引完纬线需要停止时,通入反向的电流使磁场对e型线圈产生反向力,使引纬器3完成制动停止。
44.在本实施例中,具体的,引纬槽轨2底部铺设了两列第一悬浮磁轨23,其中一列第一悬浮磁轨23为n级磁铁,另一列第一悬浮磁轨23为s级磁铁73;此外,下引纬梭板34底部也有两条与之对应的圆弧形磁铁,通过同性磁极相互排斥的作用悬浮整个引纬器3。同时,槽轨的两侧均铺设了驱动磁轨23,该驱动磁轨23采用一定的长度的永磁铁按n,s,n,s,n
……
s磁极轮换顺序依次排列。上引纬梭板33和下引纬梭板34之间固定着四个磁极感应器32,四个磁极感应器32两两一组,一组磁极感应器32朝向内环侧驱动磁轨23且受到内环侧驱动磁轨23的牵引,另一组磁极感应器32朝向外环侧且受外环侧驱动磁轨23牵引,从而带动引纬器部件3运动,完成圆周引纬动作。
45.在本实施例中,如图6、图7和图8所示,由于电磁感应原理,e型线圈 53会出现不同的磁极,当e型线圈53位于在n,s,n,s
……
排列的驱动磁轨 23一侧时,由于永磁体磁场和电磁的磁场相互作用,驱动磁轨23上的永磁体会对e型线圈53产生f(n-n)和f(n-s)两个力,在这两个力的驱动下,e型线圈53会沿着驱动磁轨23方向运动,当e型线圈53完成一次运动后,e型线圈 53的n极运动到驱动磁轨23上的n极处,由前方的磁极传感器51检测出驱动磁轨23的永磁体的磁极变化,通过控制板改变e型线圈53中的电流方向,从而e型线圈53的磁极由n变化为s,e型线圈53两侧铁芯的磁极由s变化为 n,这样驱动磁轨23对e型线圈53会产生两个新的作用力f(s-s)和f(s-n),在这两个新作用力的驱动下,e型线圈53会继续沿驱动磁轨23方向向前运动。控制板不断改变e型线圈53的电流方向,促使e型线圈53连续的沿驱动磁轨 23运动。当需要停止时,通入反向电流,使e型线圈53产生与运动方向相反的力,从而通过电磁力反向做功,对e型线圈53进行减速制动。由于上引纬梭板33和下引纬梭板34之间设置了四个e型线圈53,四个e型线圈53两两一组,当一组e型线圈53刚出驱动磁轨23时,另一组e型线圈53进入驱动磁轨23,始终存在一对e型线圈53驱动引纬器3,实现了引纬器部件3在轨迹上连续不断的做圆周运动,完成引纬过程。
46.在本实施例中,上述e型线圈53完成一次运动是指,引纬器3在驱动磁轨 23上沿驱动磁轨23前进一个磁极,每前进一个磁极,控制板都会控制e型线圈53电磁场发生变化,进而线圈固定座52的三个电磁极的磁性也会发生同步变化,即线圈固定座52在n,s,n和s,n,s之间轮流变化,从而匹配驱动磁轨23上每前进一个磁极的磁场变化,进而为引纬器3在引纬槽轨2内的运动提供源源不断的驱动力。
47.实施例二:
48.本实施例在实施例一的基础上,为携纱器4的具体结构提供一种可选方案。
49.在本实施例中,如图1、图2、图3和图8所示,一种磁悬浮圆周引纬机构,包括引纬底板1,引纬底板1上设置有引纬槽轨2,引纬槽轨2内安装有引纬器 3,引纬槽轨2底部设置有第一悬浮磁轨23,引纬槽轨2两侧壁均设置有驱动磁轨22;引纬器3底部设置有第二悬浮磁轨,第一悬浮磁轨23和第二悬浮磁轨用于驱动引纬器3悬浮在引纬槽轨2内部;引纬器3内部设置有若干磁极感应器32,若干磁极感应器32与驱动磁轨22用于驱动引纬器3沿引纬槽轨2运动;引纬器3上安装有携纱器4,携纱器4用于带动纱线与引纬器3同步运动。
50.在本实施例中,本实用新型通过在引纬器3和引纬槽轨2之间设置有第一悬浮磁轨23和第二悬浮磁轨,使得引纬器3能够悬浮在引纬槽轨2上方;且通过在引纬槽轨2的两侧壁上设置有驱动磁轨22,在引纬器3内设置有磁极感应器32,磁极感应器32根据驱动磁轨23的刺激变化而产生不同磁极,进而通过磁极变化驱动引纬器3沿着驱动磁轨23运动,引纬器3上的携纱器4牵引纱线跟随引纬器3运动;通过采用磁力悬浮和磁力驱动引纬器3运动,使引纬器3 在引纬槽轨2内运动,速度快,机械摩擦少,无机械冲击,引纬效率高,噪声小,可实现全自动引纬,大大降低了操作难度,提高了三维多层圆筒织机的生产效率。因此,本实用新型不仅结构简单,节省劳动力,而且工作效率高。
51.在本实施例中,如图4所示,携纱器4包括纬纱管42、导纱杆43、纬纱张力装置44和两个纱管固定座41,两个纱管固定座41固定安装在引纬器3顶部,纬纱管42安装在两个纱管固定座41之间,导纱杆43的一端设置在纱管固定座 41的一侧,导纱杆43的另一端安装有纬纱张力装置44。
52.在本实施例中,导纱杆43是为纬纱提供导向作用,纬纱管2上缠绕所需纬线,而纬纱张紧装置44由张力弹簧和螺栓组成,其作用使控制纬纱管放纱松紧状态,纬纱张力装置44为纬纱施加一定的张力,使其能更好的完成引纬过程。
53.实施例三:
54.本实施例在上述任意实施例的基础上,为引纬底板1的具体结构提供一种可选方案。
55.在本实施例中,如图1、图2、图3和图8所示,一种磁悬浮圆周引纬机构,包括引纬底板1,引纬底板1上设置有引纬槽轨2,引纬槽轨2内安装有引纬器 3,引纬槽轨2底部设置有第一悬浮磁轨23,引纬槽轨2两侧壁均设置有驱动磁轨22;引纬器3底部设置有第二悬浮磁轨,第一悬浮磁轨23和第二悬浮磁轨用于驱动引纬器3悬浮在引纬槽轨2内部;引纬器3内部设置有若干磁极感应器32,若干磁极感应器32与驱动磁轨22用于驱动引纬器3沿引纬槽轨2运动;引纬器3上安装有携纱器4,携纱器4用于带动纱线与引纬器3同步运动。
56.在本实施例中,本实用新型通过在引纬器3和引纬槽轨2之间设置有第一悬浮磁轨23和第二悬浮磁轨,使得引纬器3能够悬浮在引纬槽轨2上方;且通过在引纬槽轨2的两侧壁上设置有驱动磁轨22,在引纬器3内设置有磁极感应器32,磁极感应器32根据驱动磁轨23的刺激变化而产生不同磁极,进而通过磁极变化驱动引纬器3沿着驱动磁轨23运动,引纬器3上的携纱器4牵引纱线跟随引纬器3运动;通过采用磁力悬浮和磁力驱动引纬器3运动,使引纬器3 在引纬槽轨2内运动,速度快,机械摩擦少,无机械冲击,引纬效率高,噪声小,可实现全自动引纬,大大降低了操作难度,提高了三维多层圆筒织机的生产效率。因此,本实用新型不仅结构简单,节省劳动力,而且工作效率高。
57.在本实施例中,如图1所示,引纬底板1上开设有若干个交互孔,若干交互孔将引纬槽轨2均分成若干个弧形槽轨段,每个弧形槽轨段上均设置有位置传感器,位置传感器用于检测引纬器3的位置信息。
58.在本实施例中,具体的,引纬底板1上开设有八个交互孔,八个交互孔将引纬槽轨2均分成八个弧形槽轨段,每个弧形槽轨段之间的距离相等,共同形成了一个圆形轨道,八个交互孔用于本实用新型与三维多层圆筒织机的其他机构产生交互,这样方便经纬纱交织。
59.在本实施例中,位置传感器检测到引纬器3的位置信息后,将检测信号反馈给三维
多层圆筒织机的打纬机构,打纬扣板与引纬器3相互配合引动完成纬纱。
60.在本实施例中,作为可选的,位置传感器选用接近开关。
61.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
62.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。