1.本发明涉及半导体技术领域,尤其涉及一种涂胶装置。
背景技术:
2.涂胶显影机是半导体生产过程中不可或缺的设备之一,涂胶显影机主要包括涂胶单元、显影单元和热盘等。其中,参与前道工艺设备的涂胶层通常拥有多个单元腔体,设计师在考虑空间及经济的情况下,多会采用共用臂的形式服务多个单元腔体。参与前道工艺设备的涂胶层除了拥有多个单元腔体还设有多个胶嘴,尤其是以胶嘴座形式存在的彼此独立的大管径光刻胶胶路胶嘴,一般需要依靠共用臂上的夹持机构进行切换,以达到移动至晶圆上方涂胶的目的。
3.公告号为cn100336173c中国专利公开了一种基板处理装置,当若干胶嘴座设置在涂胶腔体的一侧时,胶嘴座可以共用一个手臂。当涂胶层出现多腔体、多胶嘴,且胶嘴座摆放在两腔中间位置或者光刻胶胶管≥3/8寸时,若胶嘴座共用一个手臂会由于布管等因素,致使光刻胶胶管之间发生干涉,还会经常导致折管,以至于光刻胶被堵塞在管道内。
4.因此,有必要开发一种新型涂胶装置,以避免现有技术存在的上述问题。
技术实现要素:
5.本发明的目的在于提供一种涂胶装置,能够避免光刻胶胶管之间发生干涉和折管现象,实现光刻胶稳定输送,提高工艺的稳定性。
6.为实现上述目的,本发明提供的涂胶装置包括:工艺腔体;胶嘴座,用于对工艺腔体内的晶圆涂胶;夹持机构,用于夹持所述胶嘴座;转动机构,所述转动机构包括转动端和固定端,所述夹持机构设置于所述转动端,所述转动机构带动所述夹持机构绕所述固定端转动;平移机构,所述固定端设置于所述平移机构,所述平移机构带动所述转动机构沿平移方向移动,通过所述转动机构和所述平移机构带动所述夹持机构夹持所述胶嘴座,实现所述胶嘴座在其放置位置和工艺腔体之间运动。
7.本发明提供的涂胶装置的有益效果在于:通过平移机构和设置于平移机构上的转动机构带动所述夹持机构抓取胶嘴座,使胶嘴座能够作平移和旋转运动,以避免光刻胶胶管之间发生干涉和折管现象,实现光刻胶稳定输送,提高工艺的稳定性。
8.可选的,所述夹持机构和所述胶嘴座两者中的任意一个上设置有凸台,另一个上设置有与所述凸台相配合的凹槽。其有益效果在于:依靠凸台与凹槽的配合,有利于实现简单且有效地夹持。
9.可选的,所述凸台以凸起方向相向的方式设置于所述胶嘴座,所述凹槽以开口方向相背的方式设置于所述夹持机构。其有益效果在于:夹持机构上设置凹槽,以夹持机构进入胶嘴座内部的方式进行夹持,有利于减小胶嘴座的内部空间,进而减小胶嘴座的尺寸。
10.可选的,所述凸台以凸起方向相背的方式设置于所述夹持机构,所述凹槽以开口方向相向的方式设置于所述胶嘴座。其有益效果在于:夹持机构上设置凸台,以夹持机构进
入胶嘴座内部的方式进行夹持,有利于使摩擦产生的颗粒落在胶嘴座内,避免颗粒进入工艺腔体,影响工艺稳定性。
11.可选的,所述凸台为圆锥形凸台,所述凹槽为圆锥形凹槽。其有益效果在于:圆锥形的凸台和凹槽更容易相互配合,有利于降低对夹持机构的移动精度要求,提高夹持的稳定性。
12.可选的,所述平移机构上设置有限制所述转动机构转动角度的限位部。其有益效果在于:有利于避免转动机构与外部结构发生机械干涉。
13.可选的,所述转动机构还包括转动轴和用于确定所述转动轴原点的定位装置,所述定位装置包括设置于转动件半径方向上的挡片和检测所述挡片位置的传感器。其有益效果在于:有利于确定并反馈转动机构的位置。
14.可选的,所述转动轴为轴向贯通的中空轴。其有益效果在于:中空结构便于走线,并且有利于减轻装置重量、降低成本。
15.可选的,所述转动机构包括转动臂,所述转动臂上开设有第一走线开口,所述第一走线开口用于线缆通过。其有益效果在于:便于走线。
16.可选的,所述转动臂上设置有压线块。其有益效果在于:有利于固定线缆,避免发生干涉。
17.可选的,所述平移机构侧壁上设有第二走线开口,所述第二走线开口处设置有密封堵头。其有益效果在于:有利于实现传动结构密封,避免传动结构运动过程中产生的颗粒影响工艺稳定性。
18.可选的,所述平移机构包括上密封板和下密封板,所述上密封板和所述下密封板与所述平移机构的侧壁围成密封空间。其有益效果在于:有利于实现传动结构密封,避免传动结构运行过程中产生的颗粒影响工艺稳定性。
附图说明
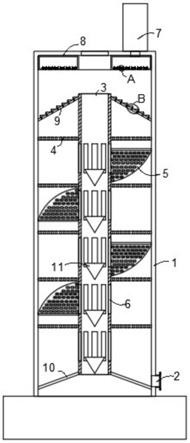
19.图1为本发明涂胶装置实施例的工作示意图;
20.图2为图1所示的胶嘴座的结构示意图;
21.图3为图2所示的被夹持部的结构示意图
22.图4为与图3所示的被夹持部相配合的第一夹持件与第二夹持件的结构示意图;
23.图5为本发明涂胶装置实施例的部分结构的结构示意图;
24.图6为图5所示的涂胶装置的部分结构的剖视图;
25.图7为图5所示的涂胶装置的部分结构的俯视图;
26.图8为图5所示的涂胶装置的部分结构的轴测图;
27.图9为图1所示的涂胶装置的平移机构的部分结构的结构示意图;
28.图10为图6所示的交叉滚子轴承的结构示意图;
29.图11为图6所示的转动轴的结构示意图;
30.图12至图14为图1所示的涂胶装置的走线位置示意图。
具体实施方式
31.为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中
的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。除非另外定义,此处使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本文中使用的“包括”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
32.为解决现有技术存在的问题,本发明实施例提供了一种涂胶装置。
33.图1为本发明涂胶装置实施例的工作示意图;图2为图1所示的胶嘴座的结构示意图;图3为图2所示的被夹持部的结构示意图图4为与图3所示的被夹持部相配合的第一夹持件与第二夹持件的结构示意图;图5为本发明涂胶装置实施例的结构示意图;
34.本发明一些实施例中,参照图1至图5,包括:工艺腔体;胶嘴座2,用于对工艺腔体内的晶圆涂胶;夹持机构3,用于夹持所述胶嘴座2;转动机构4,所述转动机构4包括转动端和固定端,所述夹持机构3设置于所述转动端,所述转动机构4带动所述夹持机构3绕所述固定端转动;平移机构5,所述固定端设置于所述平移机构5,所述平移机构5带动所述转动机构4沿平移方向移动,通过所述转动机构4和所述平移机构5带动所述夹持机构3夹持所述胶嘴座2,实现所述胶嘴座2在其放置位置和工艺腔体之间运动。
35.具体的,参照图1,所述工艺腔体包括第一工艺腔体11和第二工艺腔体12。
36.具体的,参照图1和图2,所述胶嘴座2包括第一胶嘴座21、第二胶嘴座22,所述胶嘴座2设置于所述第一工艺腔体11和所述第二工艺腔体12之间。
37.具体的,参照图2和图3,所述胶嘴座2连接有光刻胶胶管,所述胶嘴座2还包括被夹持部23,所述被夹持部23为中空结构,内壁上设置有若干凸台24。
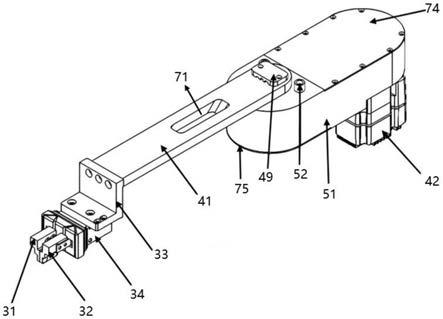
38.具体的,参考图1至图5,所述夹持机构3包括第一夹持件31、第二夹持件32、夹持安装件33和夹持驱动部34;所述第一夹持件31和所述第二夹持件32安装于所述夹持驱动部34上,其末端设置有若干凹槽35,所述凹槽35与所述被夹持部23的所述凸台24相互配合,实现夹持;所述夹持驱动部34通过所述夹持安装件33固定安装于所述转动机构4的转动端。
39.图6为图5所示的涂胶装置的部分结构的剖视图。
40.具体的,参照图1、图5和图6,所述转动机构4包括转动臂41和转动驱动部;所述转动驱动部包括电机42、同步轮、同步带44和转动轴45;所述固定端为所述转动臂41靠近所述转动轴45的一端,所述转动端为所述转动臂41的另一端;所述转动臂41上设置有圆孔,所述转动轴45的一端设置于所述圆孔的内壁,两者之间通过键连接实现旋转运动的传动;电机42安装于所述平移机构5,主动同步轮431和从动同步轮432分别安装于电机42的驱动轴和所述转动轴45的另一端,同步轮之间通过所述同步带44实现带传动,所述同步轮与电机42的驱动轴和与所述转动轴45之间通过键连接实现旋转运动的传动,进而带动所述转动臂41沿图示b方向或其反方向转动。
41.图9为图1所示的涂胶装置的平移机构的部分结构的结构示意图。
42.具体的,参照图9,所述平移机构5包括平移臂51和平移驱动部;所述平移驱动部包括平移臂安装板56、导轨53、电机、齿条55、同步轮、同步带和连接件54;所述平移臂51通过平移臂安装板56设置于所述连接件54;所述连接件54滑动设置于所述导轨53;所述连接件54通过所述齿条55连接同步带,电机驱动同步轮转动,实现同步带带动所述齿条55移动,进
而带动所述平移臂51沿平移方向移动,即图示a方向或其反方向运动。
43.本发明一些具体实施例中,参照图5,所述夹持驱动部34为气动手指或电动手指,驱动所述第一夹持件31和所述第二夹持件32相互靠近或远离运动。
44.图10为图6所示的交叉滚子轴承的结构示意图;图11为图6所示的转动轴结构示意图。
45.本发明一些具体实施例中,参照图6、图9和图11,所述转动轴45与通过交叉滚子轴承47安装于所述平移机构5上,三者之间通过螺纹连接固定,所述交叉滚子轴承47与平移机构5之间设置有轴承垫圈。
46.本发明一些具体实施例中,参照图6,所述转动轴45上的零件通过卡簧、轴环实现轴向固定。
47.图7为图5所示的涂胶装置的部分结构的俯视图。
48.本发明一些具体实施例中,参照图1和图7,所述同步带44上还设置有张紧轮48,所述张紧轮48通过张紧支架46固定于所述平移机构5,所述张紧轮48的位置可通过张紧支架46上的弧形腰孔调节。
49.本发明一些具体实施例中,所述电机可以为步进电机或伺服电机。
50.本发明一些实施例中,所述夹持机构3和所述胶嘴座2两者中的任意一个上设置有凸台24,另一个上设置有与所述凸台24相配合的凹槽35。
51.具体的,通过所述凸起24余所述凹槽35的相互配合,实现夹持机构3对所述胶嘴座2的夹持。
52.本发明一些具体实施例中,参照图1、图2、图3和图4,所述凸台24以凸起方向相向的方式设置于所述胶嘴座2,所述凹槽35以开口方向相背的方式设置于所述夹持机构3。
53.本发明一些具体实施例中,所述凸台24以凸起方向相背的方式设置于所述夹持机构3,所述凹槽35以开口方向相向的方式设置于所述胶嘴座2。
54.本发明一些实施例中,参照图3和图4,所述凸台24为圆锥形凸台,所述凹槽35为圆锥形凹槽。
55.本发明一些实施例中,参照图1和图5,所述平移机构5上设置有限制所述转动机构4转动角度的限位部52。
56.具体的,参照图5,所述限位部52设置于所述平移臂51的上表面,并限制所述转动臂41的转动角度。
57.图8为图5所示的涂胶装置的部分结构的轴测图。
58.本发明一些实施例中,参照图1、图6和图8,所述转动机构4还包括转动轴45和用于确定所述转动轴45原点的定位装置,所述定位装置包括设置于转动轴45半径方向上的挡片61和检测所述挡片位置的传感器62。
59.具体的,参照图6和图8,所述挡片61随所述转动轴45转动而转动;所述传感器62为光电传感器,其位置设置于所述转动轴45位于原点时所述挡片61所在的位置。
60.本发明一些实施例中,参照图6,所述转动轴45为轴向贯通的中空轴。
61.具体的,参照图6和图11,所述转动轴45的内部中空空间用于线缆通过。
62.本发明一些实施例中,参照图1和图5,所述转动机构4包括转动臂41,所述转动臂41上开设有第一走线开口71,所述第一走线开口71用于线缆通过。
63.具体的,参照图5,所述第一走线开口71在所述转动臂41的长度方向上的截面形状为平行四边形。
64.本发明一些实施例中,参照图5,所述转动臂41上设置有压线块49。
65.具体的,参照图5和图6,所述压线块49设置于所述转动臂41靠近所述转动轴45的位置,以避免线缆走线变向后翘起。
66.本发明一些实施例中,所述平移机构5侧壁上设有第二走线开口72,所述第二走线开口72处设置有密封堵头73。
67.具体的,参照图6和图7,所述平移臂51侧壁上设有第二走线开口72,所述第二走线开口72处设置有密封堵头73。
68.本发明一些实施例中,参照图1和图5,所述平移机构5包括上密封板74和下密封板75,所述上密封板74和所述下密封板75与所述平移机构5的侧壁围成密封空间。
69.具体的,所述转动驱动部的传动机构设置于所述密封空间内。
70.本发明一些具体实施例中,线路经过处均设置有防磨板。
71.图12至图14为图1所示的涂胶装置的走线位置示意图。
72.本发明一些具体实施例中,装置线路从夹持机构起,穿过所述第一走线开口并通过所述压线块固定于所述转动臂上方。
73.本发明一些具体实施例中,装置线路通过所述转动轴的中空空间进入平移臂的内部空间,并通过管线夹固定在所述平移臂的内侧壁。
74.本发明一些具体实施例中,装置线路通过所述第二走线开口穿出所述平移臂。
75.虽然在上文中详细说明了本发明的实施方式,但是对于本领域的技术人员来说显而易见的是,能够对这些实施方式进行各种修改和变化。但是,应理解,这种修改和变化都属于权利要求书中所述的本发明的范围和精神之内。而且,在此说明的本发明可有其它的实施方式,并且可通过多种方式实施或实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。